S Cooper, J Warner
I've been using a particle swarming script developed by Conor, to design some sensor correction filters in different environmental conditions., the method used by the script is described in G1700841.
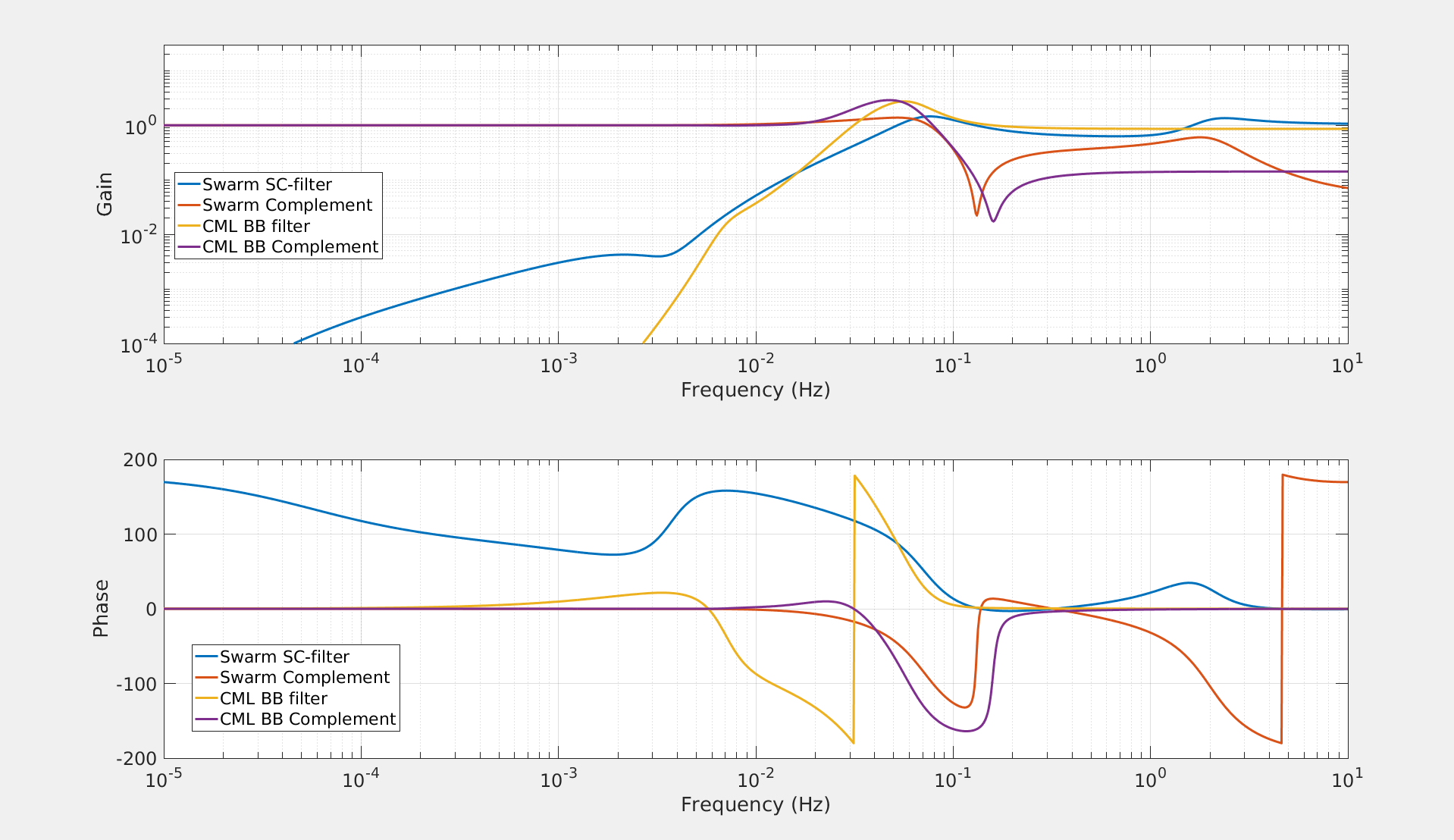
I chose a starting point of GPS time 1193385618 (8AM 30th October 2017 UTC) and used data for 2 hours on ETMY. During this time the microsisem was around 0.2-0.3 um/s and the wind speed was around 10m/s. I configured the swarm to have 4000 particles, set the RMS counting from 2Hz down to 1mHz, set minimum and maximum Q's to be 0.05 and 5 respectively and set the gains to range from 0.95 and 1.05. The result of this swarming produced the filter shown in blue in the first plot and its complement in red, plotted against the sensor correction filters currently used (Filter Module 5 CML BB).
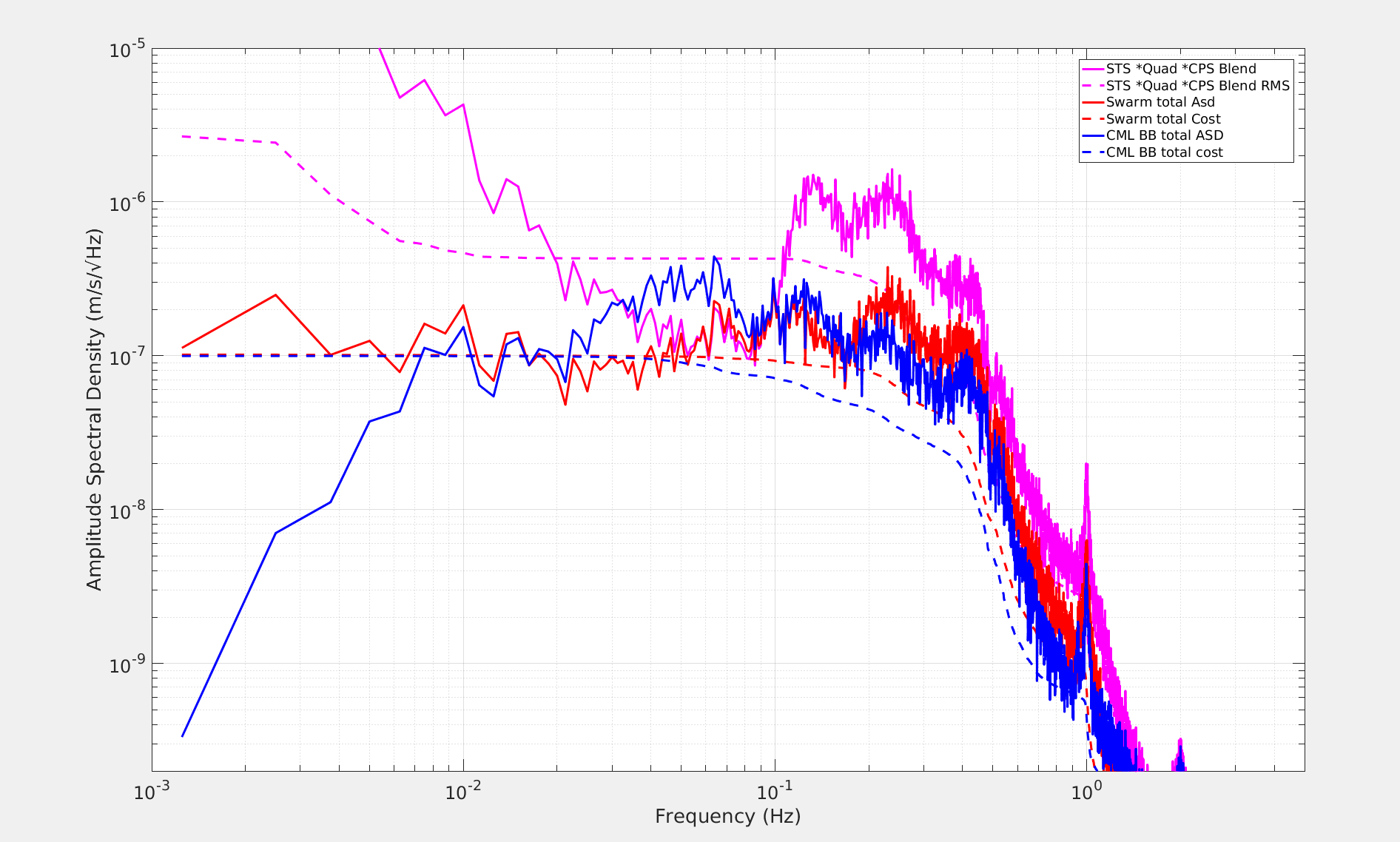
For these conditions, on this chamber the ending velocity RMS (how we're measuring how well the filter performs) is basically equal to the sensor correction filter currently used. Nevertheless Jim and I will try this filter out on ETMY and see whether this has any problems / benefitsover the old filter overnight on ETMY.

We've successfully quacked the filter to the Y IIRHP path on ETMY, set the end-station ST1 conf guardian to 250_Eq blend sc state (this uses the IIR path, I checked that this is the only st1 sc path on and all the other bits are on), turned the st2 sensor correction back on, turned the hepi Z sensor correction on and re-isolated the platform. I want to leave the ISI in this config overnight, for analysis. So far it seems stable.