jeffrey.kissel@LIGO.ORG - posted 13:05, Friday 03 November 2017 - last comment - 13:22, Friday 03 November 2017(39277)
H1SUSSR2 M2 UL OSEM Actuation Chain Functional!
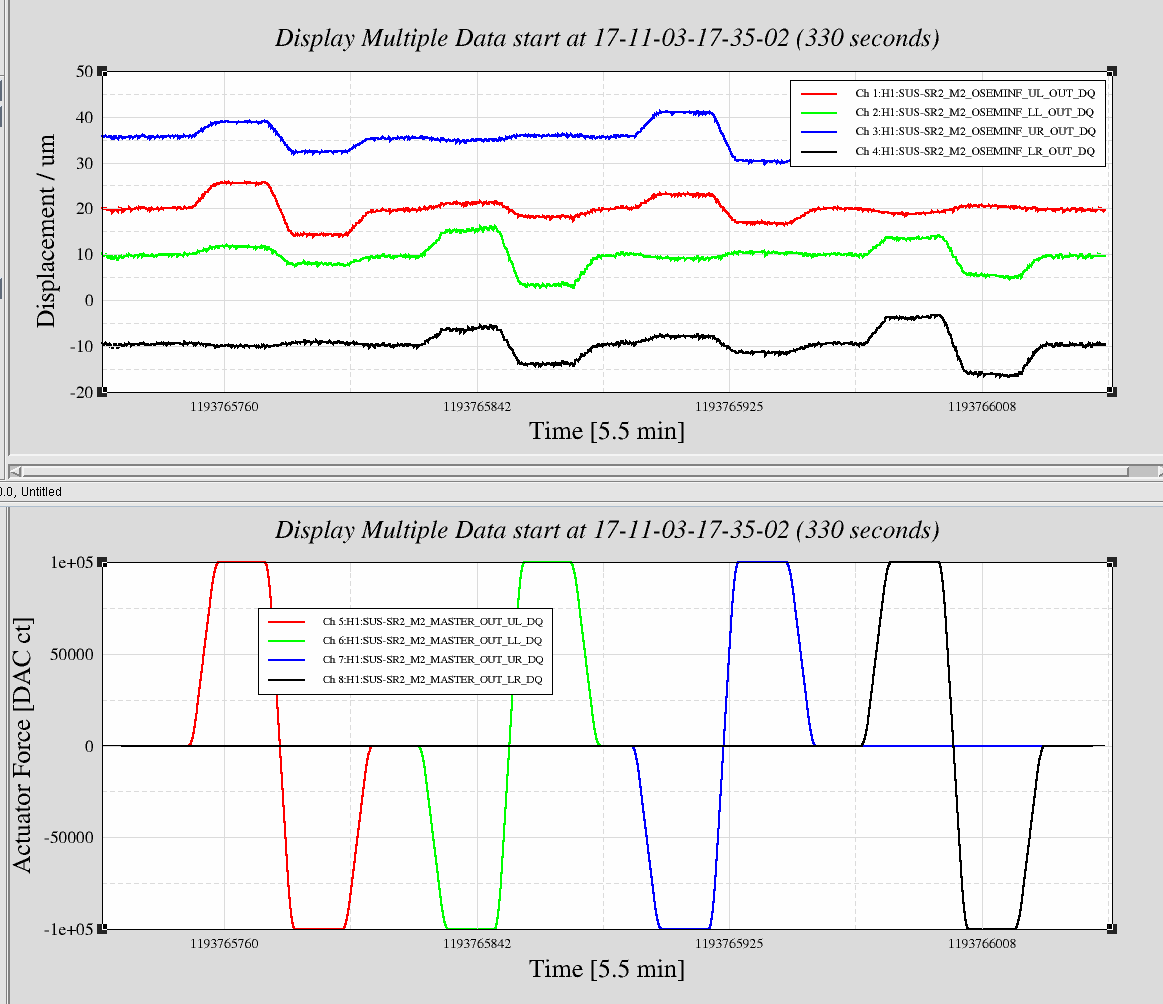
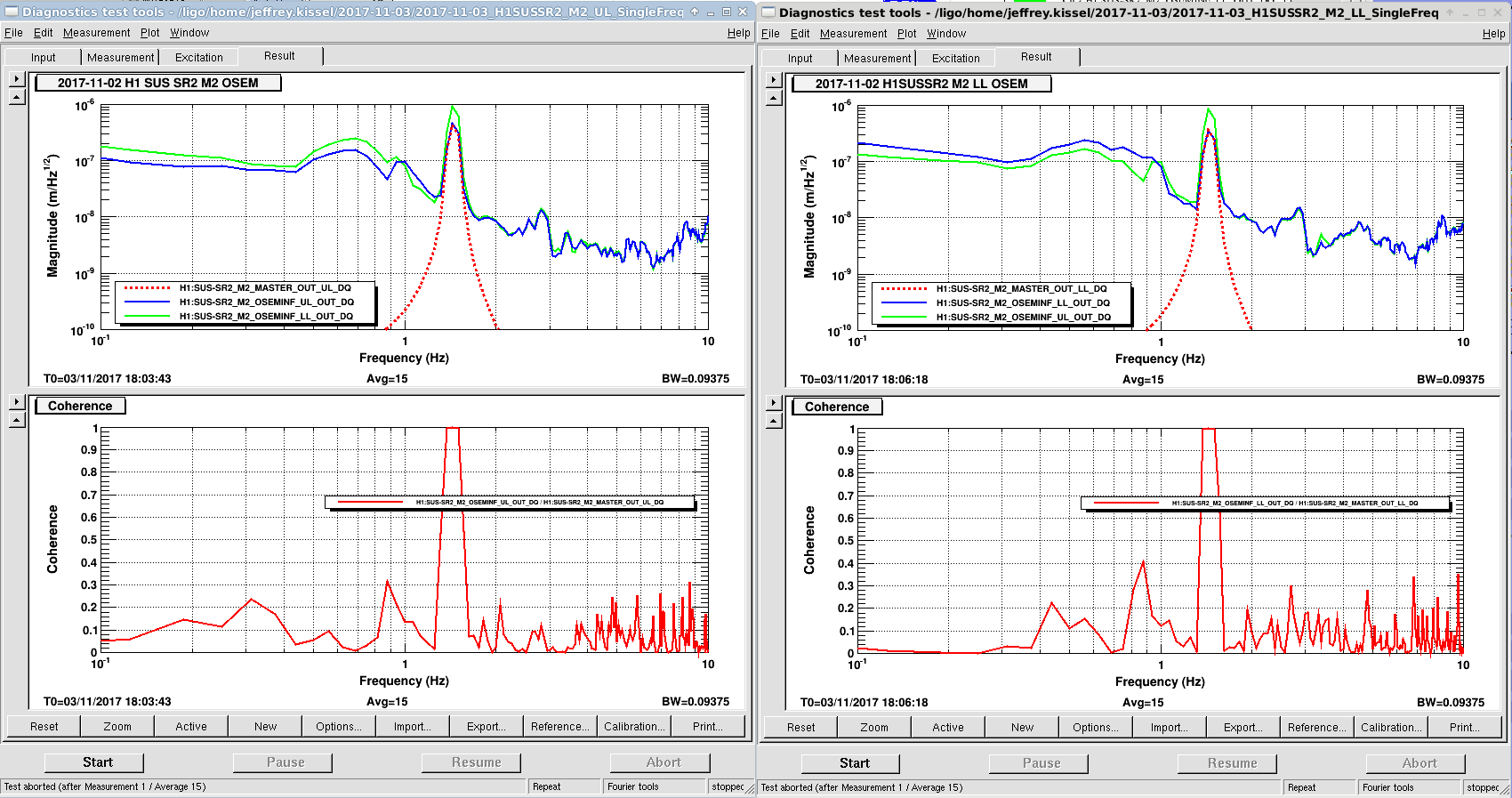
J. Kissel, T. Sadecki FRS Ticket 5058 Travis replaced the in-vacuum, 4xDB9-to-DB25, "quadrapus" cable between the OSEMs and the "seismically-responsible-suspension (SRS)" in-vac cable for the H1SUSSR2 M2 stage (see LHO aLOG 39275) in order to further investigate the problems with UL's inability to actuate. Replacing this cable has fixed the issue. I attach corroborating evidence. (1) The range-of motion test results. Where we did not see any motion during driven offsets on the UL chain yesterday after replacing the OSEM itself (LHO aLOG 39263), we now see actuation response on all M2 OSEMs (2) The single-frequency sign wave test results. Where we saw no coherence or displacement in the UL OSEM ASD yesterday, we see plenty today and it's virtually identical to the known-good LL response. (3) The full suite of M2 to M2 transfer functions. We no longer see any unexpected cross coupling between P and Y, and the response to drive in all DOFs is larger, now that we're actuating with 4 OSEMs instead of 3. We may finally close this FRS ticket! Other Notes: - Given the new quadrapus cable affects the response of all OSEM sensors on the cable, we remeasured open light currents, and updated the OSEMINF calibration infrastructure. OSEM Open Light Current OSEMINF OFFSET OSEMINF GAIN (OLC) (-1 * OLC / 2) (30000 ./ OLC) [ADC Counts] [ADC Counts] [um / um] UL 24546 -12273 1.2222 LL 19482 -9740.8 1.5399 UR 17731 -8865.4 1.692 LR 19314 -9657.2 1.5532 - The (modified) triple-acquisition driver for this stage was set to its highest actuation strength for these measurements, state 2. - Now that SR2's M2 stage is fully operational and may potentially be a globally control, we will need to balance the actuation strength by applying non-unity COILOUTF gains calculated via methods described in LHO aLOG 13203 - If we're interested in any frequency-dependent drive DOF decoupling (a. la. LHO aLOG 32503), I've now tuned this set of templates to get much better coherence than what had previously been in this SUS's SAGM2 folder (and they now store the M3 sensors such that we can export the M2-to-M3 transfer function). The data can be found here: /ligo/svncommon/SusSVN/sus/trunk/HSTS/H1/SR2/SAGM2/Data/ 2017-11-03_1816_H1SUSSR2_M2_WhiteNoise_L_0p01to50Hz.xml 2017-11-03_1816_H1SUSSR2_M2_WhiteNoise_P_0p01to50Hz.xml 2017-11-03_1816_H1SUSSR2_M2_WhiteNoise_Y_0p01to50Hz.xml - All data and updates to "plotall" scripts have been commited to the SusSVN repo in the appropriate places.
Images attached to this report
Non-image files attached to this report

Comments related to this report
Note: I did NOT replace the SRS cable as this was not necessary. Sorry, misread Kissel's log.