and there may be a minor amount of yaw coupling.
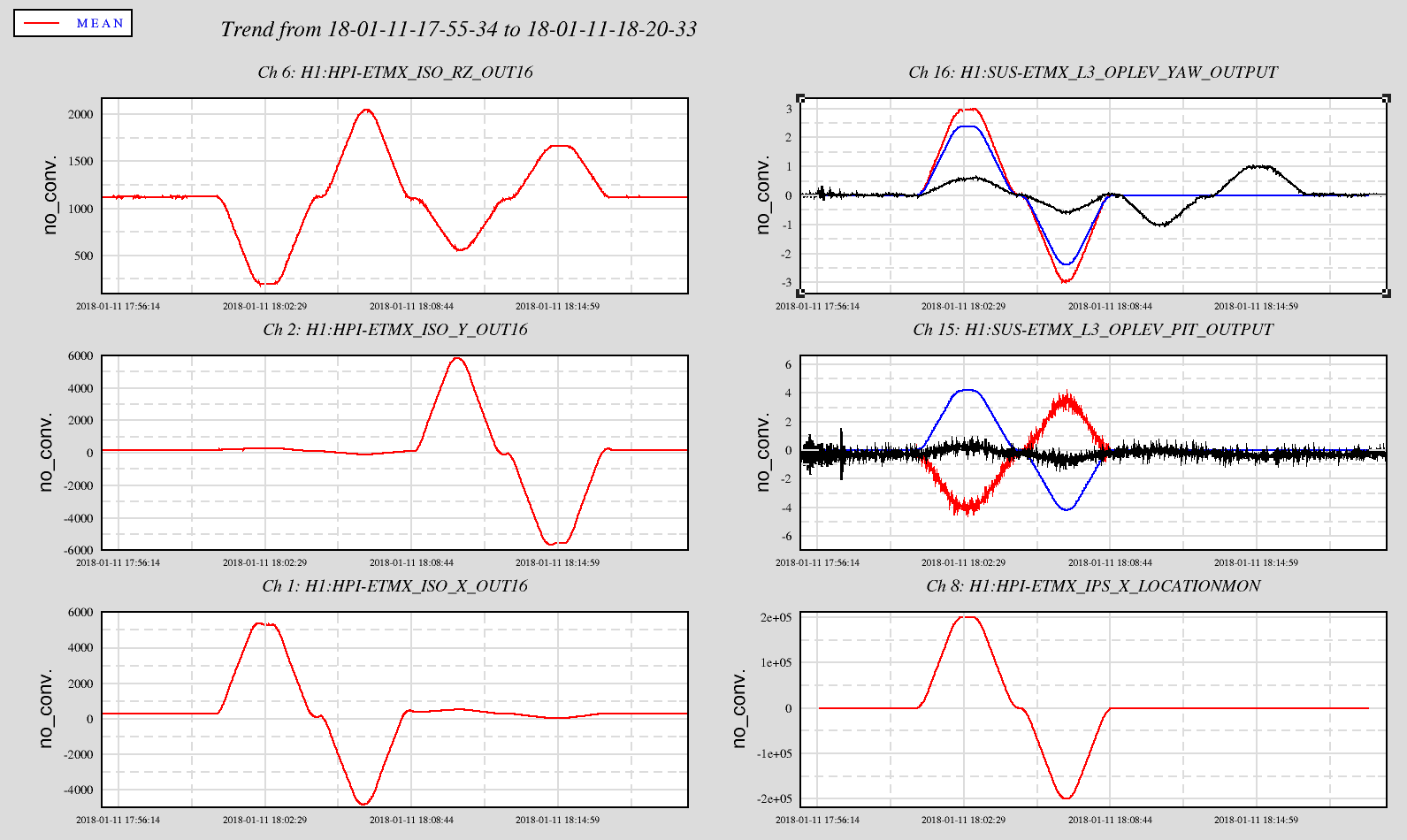
The attached 25 minute time series shows a +-200000nm drives in X & Y on ETMX. This offset into the ISO loop is ramped in for 120 seconds. The upper left plot shows the ISO_RZ output keeping the computed RZ_LOCATIONMON at zero. The lower right plot X_LOCATIONMON is used to calculate the Length to angle coupling on the Optical Lever output:
OpticP(Y)[urad] = OplevP(Y)[urad] - LengthDrive[nm] * Len2Pit(Yaw)CC[mrad/m] * 1e-9[m/nm] * 1e3[urad/mrad]; Len2Pit(Yaw)CC from E1200836: 20.89 (11.9)mrad/m
So in the two upper right plots, the Pitch and Yaw expected to be seen on the Oplev due to the X motion are, shown in blue and subtracted from the raw Oplev output (red) giving the residual in black. We believe the HEPI calculations for position are very good and our loops hold things at those positions. With that assumption, we'd expect most of the signal seen on the OPLEV is from the drive. As the residual during the X drive is small (<20%,) maybe this suggests the coefficients in E1200836 are not too far off.
So, for ETMX, certainly most of Pitch and Yaw seen on the optical lever when driving X is from the Cross-coupling effect. But there appears to be some actual optic YAW from these HEPI translation. There is no a priori cross-coupling from Y motion on ETMX as the Optic shears across the optic normal. The YAW seen during the Y translation is twice as large as during the X motion suggesting that even with our loops closed, we are still getting some YAW at the optic..
This is pretty small and obviously the ASC loops are managing with this and when do we ever translate the optic 200um? Oh, yes, for tidal relief...