jeffrey.kissel@LIGO.ORG - posted 17:35, Friday 19 January 2018 - last comment - 14:24, Monday 22 January 2018(40207)
H1SUSZM2 Electronics Still Not Perfectly Functional
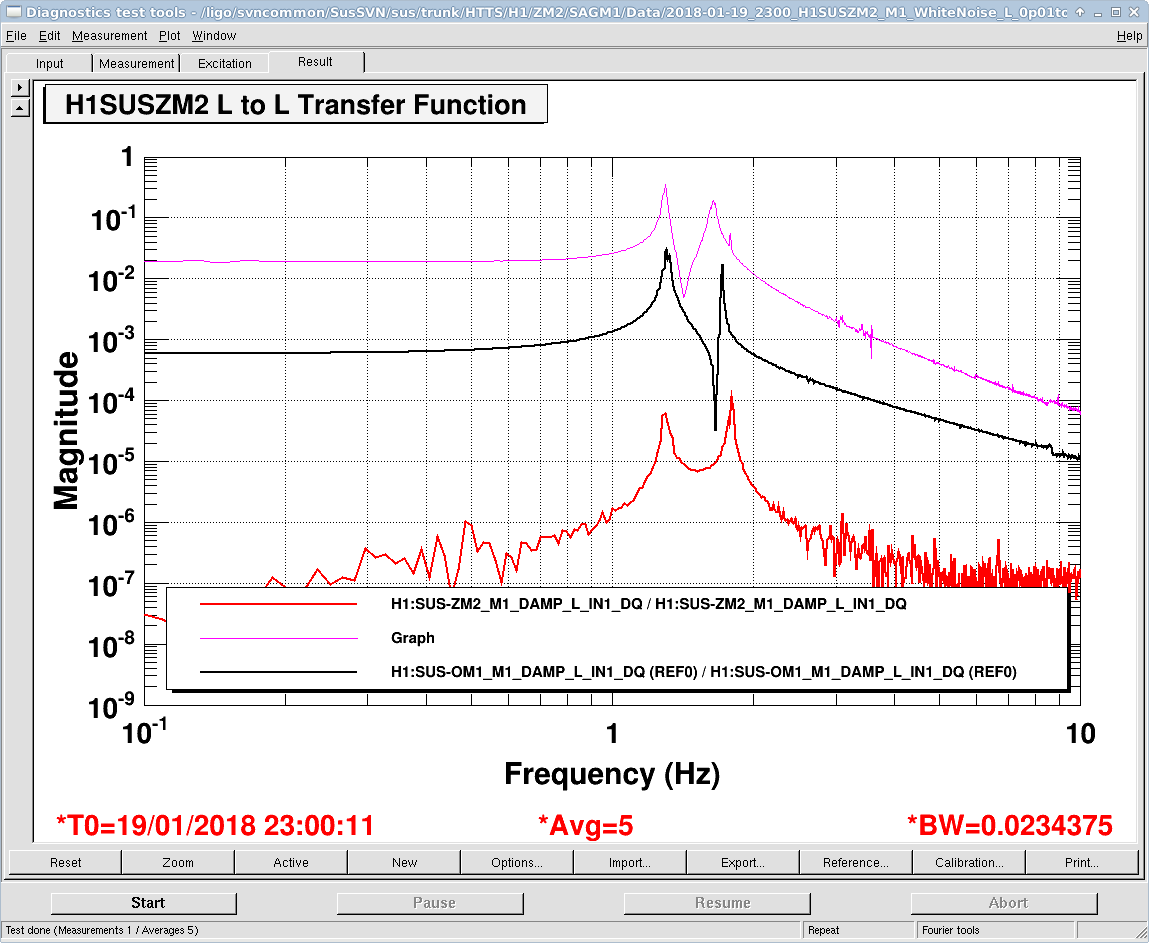
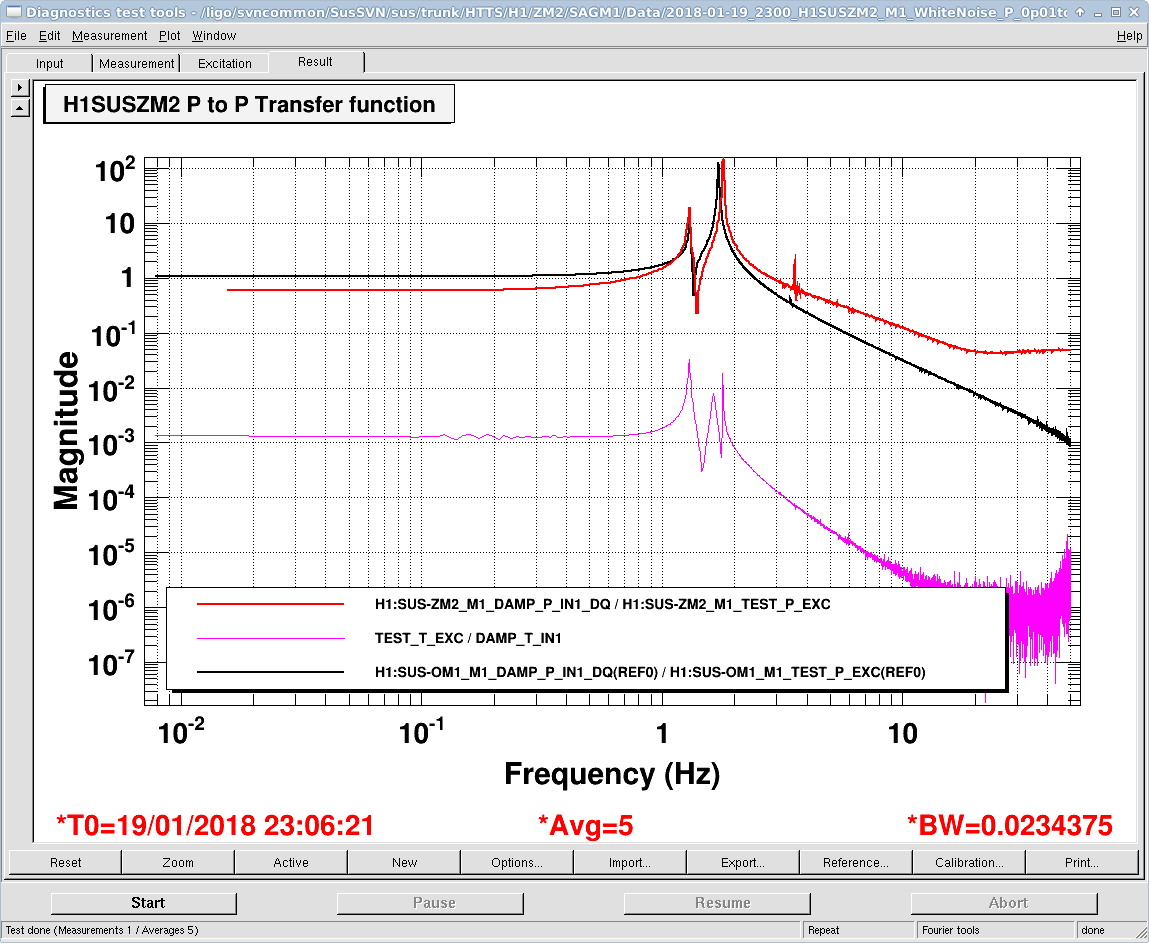
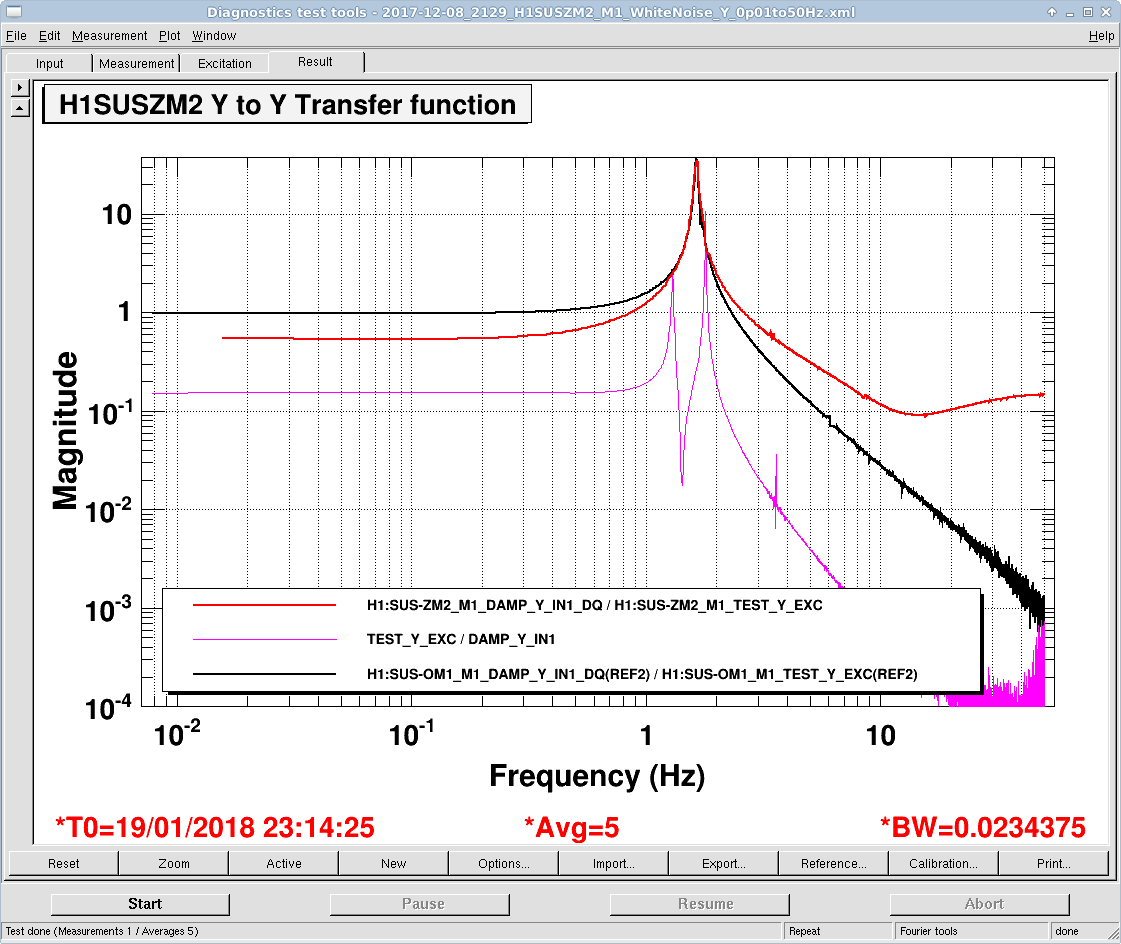
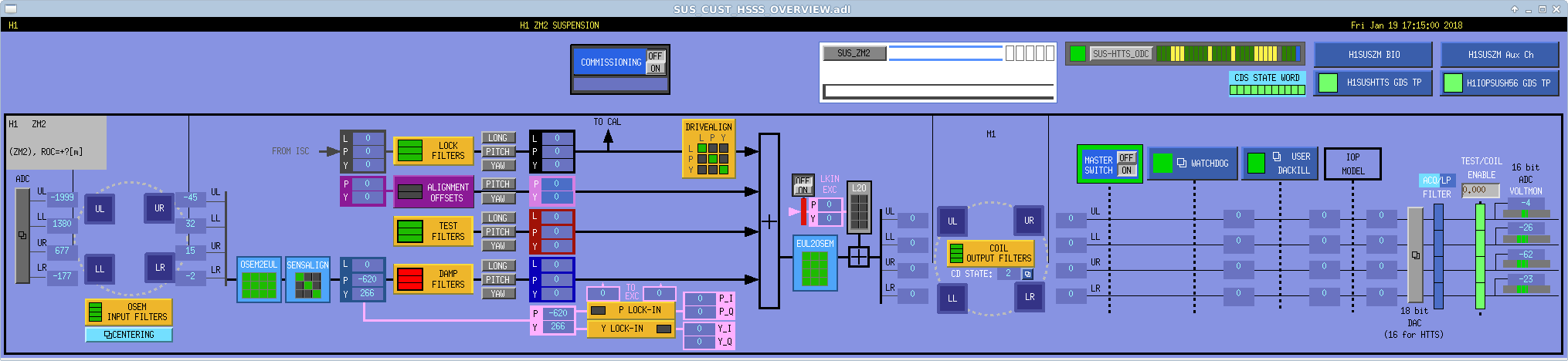
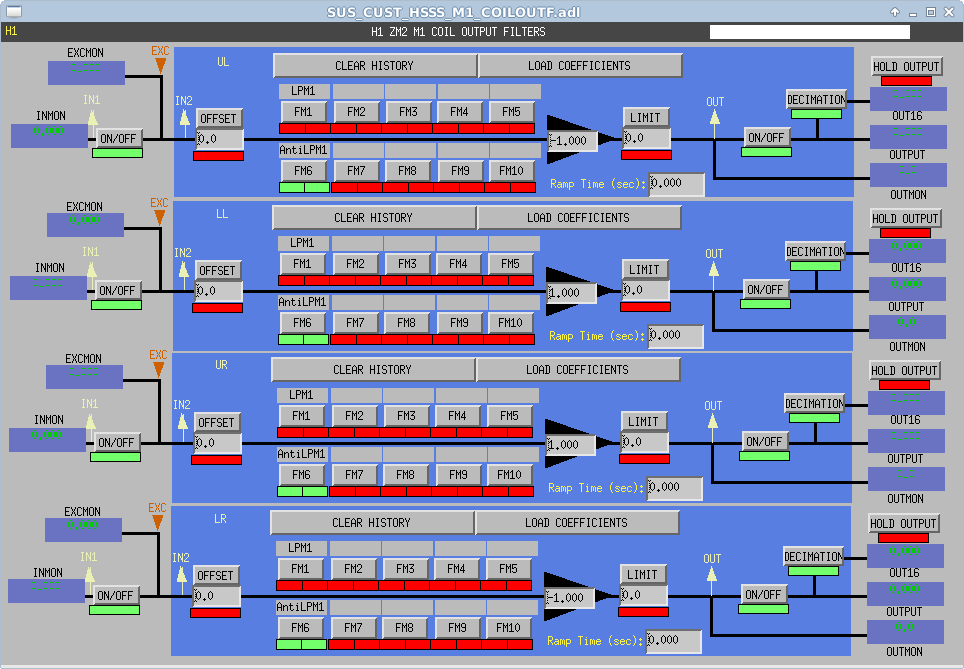
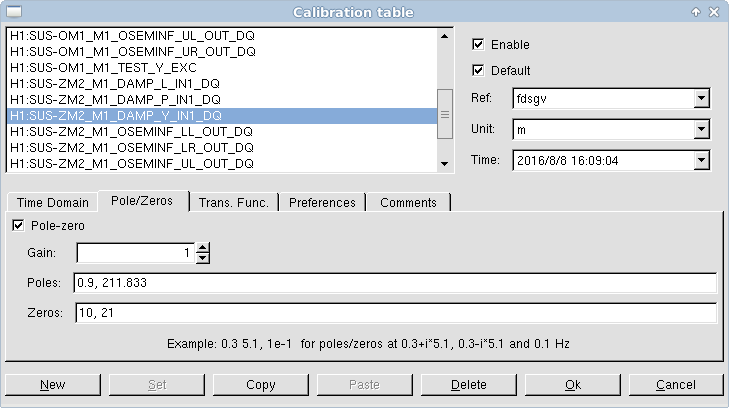
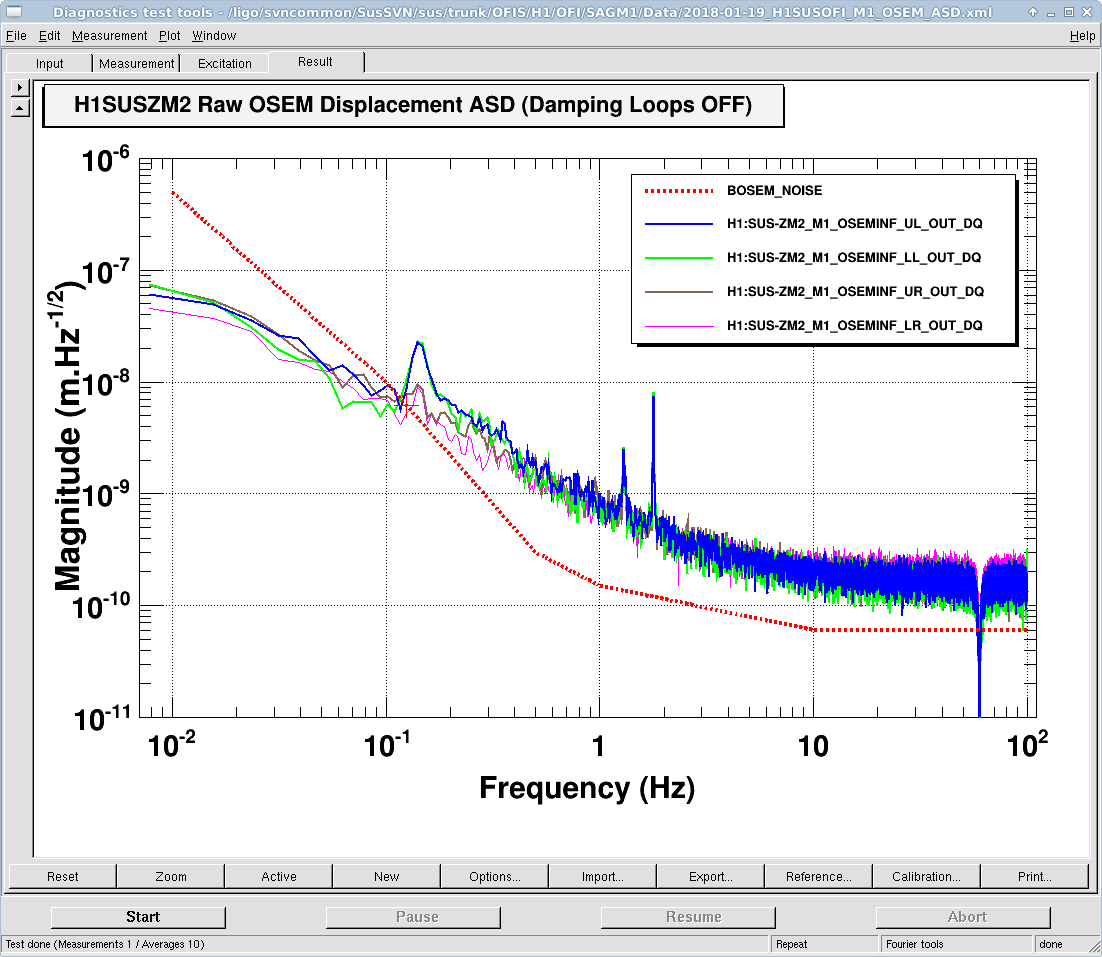
J. Kissel, M. Pirello After finishing out the OFI, I moved on to H1SUSZM2. It doesn't yet work. Symptoms: - The OSEM sensor readbacks (the ADC inputs on the MEDM screen) are showing little-to-no signal (only ~1000 cts), however transfer functions still have plenty of coherence. - Although ZM2 is driven with an ISC configuration HAM-A driver, which supposedly has all binary control jumpered such that the low-pass filter is engaged, the pitch and yaw transfer functions show excess response at high frequency, which can be "calibrated out" by using exactly the same poles and zeros as the low pass filter (zpk(zeros,poles,gain,normalization) = zpk([0.9;211.883],[10;21],1,"n")). So it's as though the filter *has not* been jumpered. However, because there's plenty of coherence with the TFs, the Test/Coil enable jumper must be good. - In a quiescent state (damping loops OFF, but no excitation), the BOSEMs ASD shows noise elevated way above the noise floor. - Earlier in the day, when the external OFI's signal chain was unknowingly hooked up to the ZM2 in-vacuum chain, we saw lots of signal (i.e. the typical ~15000 cts), and transfer functions showed a normal frequency response (except for the poor basis conversion; see MAGENTA comments below). Attached are - Transfer Functions. BLACK is an old OM1 result, RED is as it stands now, MAGENTA is driven and readout with the OFI chain. Regarding MAGENTA -- Unfortunately, when driving a 4-OSEM tip tilt through the 3 OSEM OFI chain with the wrong coordinate transformation matrices means that all three "long" "pitch" and "yaw" drives were some wonky combination of only UL, LL, and UR. That's why you see a poorly diagonalized result, and you see all three DOF's modes in each TF. - Some MEDM screen shots relevant to the discussion - The DTT and Foton comparison for the "calibration" of the Pitch and Yaw TFs. Note, the TFs are *not* shown with the calibration, but trust me, when it's applied it makes the high frequency response of the RED match BLACK - The OSEMs ASD compared against the target / spec BOSEM noise. Because of the incorrect frequency response, I suspect the coil driver either hasn't been jumpered or it's just a bad board. Note, also, as is standard on the HAM-A driver, US field sat-amp systems, the sensor signals are plugged directly from the sat-amp into the AA chassis towards the ADC / IO chassis. That means that the sensor signals, which are polluted with noise are *not* being polluted by the coil driver. So maybe both are problematic? We know the in-vac suspension and electronics are OK, because they tested well with the OFI signal chain. We'll investigate further on Monday.
Images attached to this report

Comments related to this report
After discussing with Jeff, I pulled the ZM2 coil driver S1700079 and found that the jumpers were not installed correctly. I installed jumpers on the W2 links and P3 (Run/Acquire Controls and Indicators) matching this unit to the ones we worked on prior.
It looks like the ZM1, VOPO 1-4, VOPO 5-6 also need the same treatment as their indicator lights are not correct on the front of the chassis.