Ronaldas, Sheila
I have restructured previously used noise budget code (git repo, see /restructured_nb folder). This way it is easier to add other noises and debug the code.
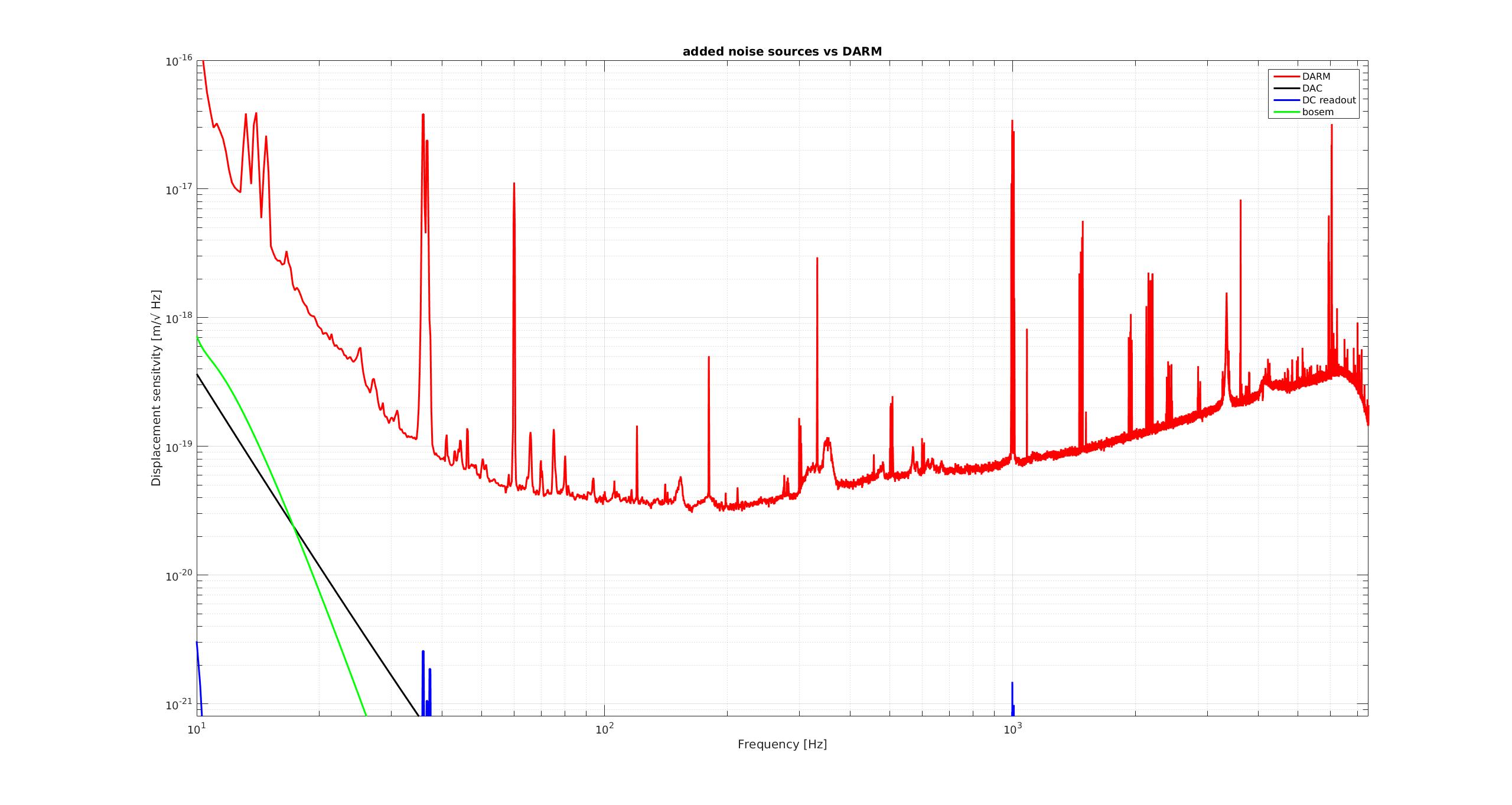
Afterwards we added additional noise sources:
1) actuator DAC noise - DAC noise from the test mass PUM based on the model in G1100968
2) DC readout quadratic term - see an alog DC readout quadratic term
3) osem sensors noise - noise from the top mass damping to the quad suspensions
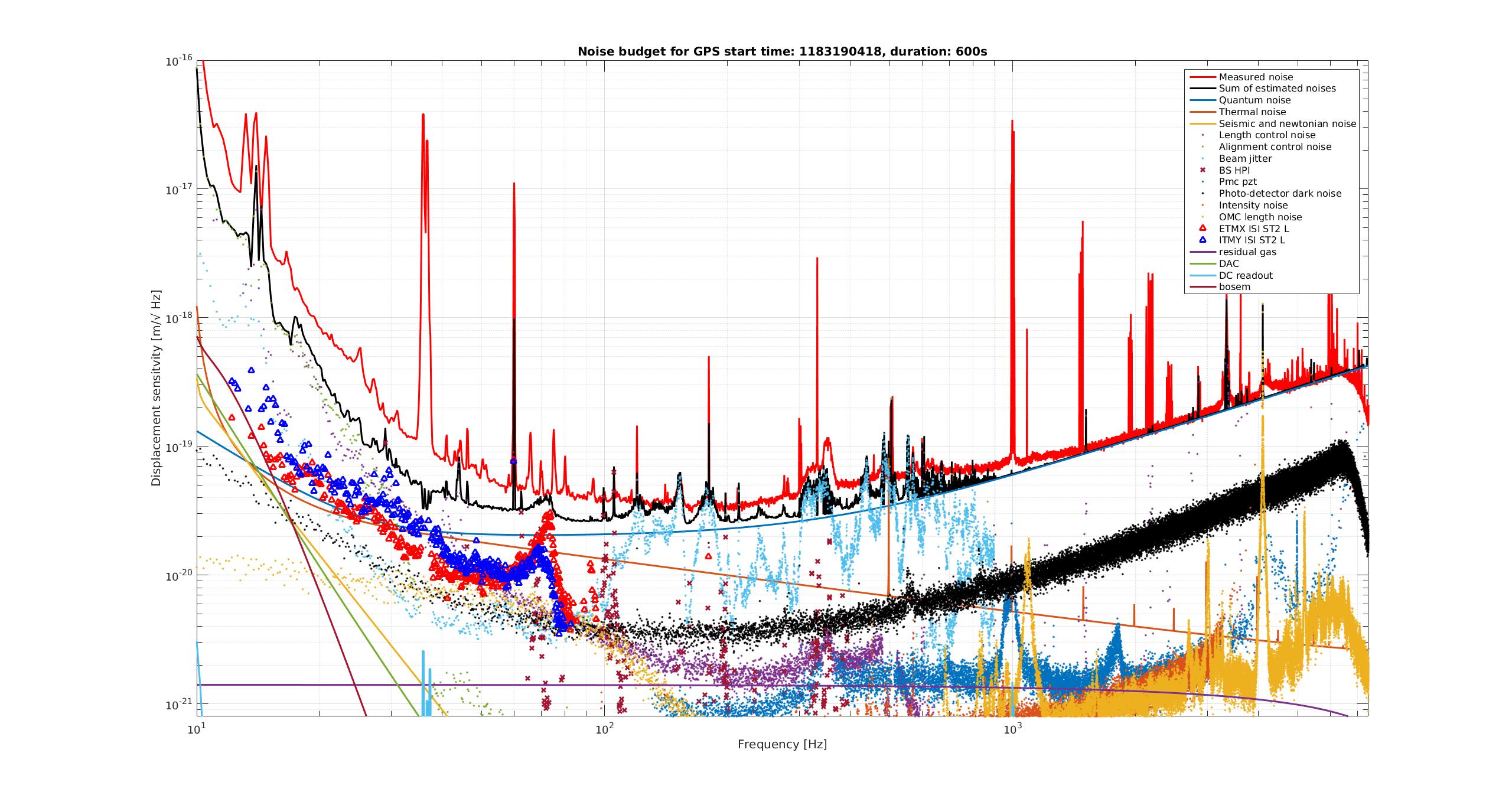
4) thermal noise (updated to the most current GWINC version)
Attached plots show a contribution from recently added noises (recent_contribution_NB.jpg) and an example of total noise budget (noise_budget.jpg). Plots are made using July 4th 2017 data, a lock before the earthquake that increased LHO noise.
Currently we are working on two noises:
1) residual gas in vacuum: squeezed film damping noise and residual gas in arms.
2) coherent noise: a coherence based projection of jitter from the bullseye sensor upstream of the PMC, which was contributing to the DARM noise from 30Hz-1 kHz in this lock stretch
Thanks Jeff for suspension quadmodel and controls design summary table - that saved tons of time!
Also, a note: let me or Sheila know if you think there is a noise source that should be in this noise budget.