jeffrey.kissel@LIGO.ORG - posted 15:58, Tuesday 26 June 2018 (42662)
Re-Balance of H1SUSETMX PUM/L2 Stage
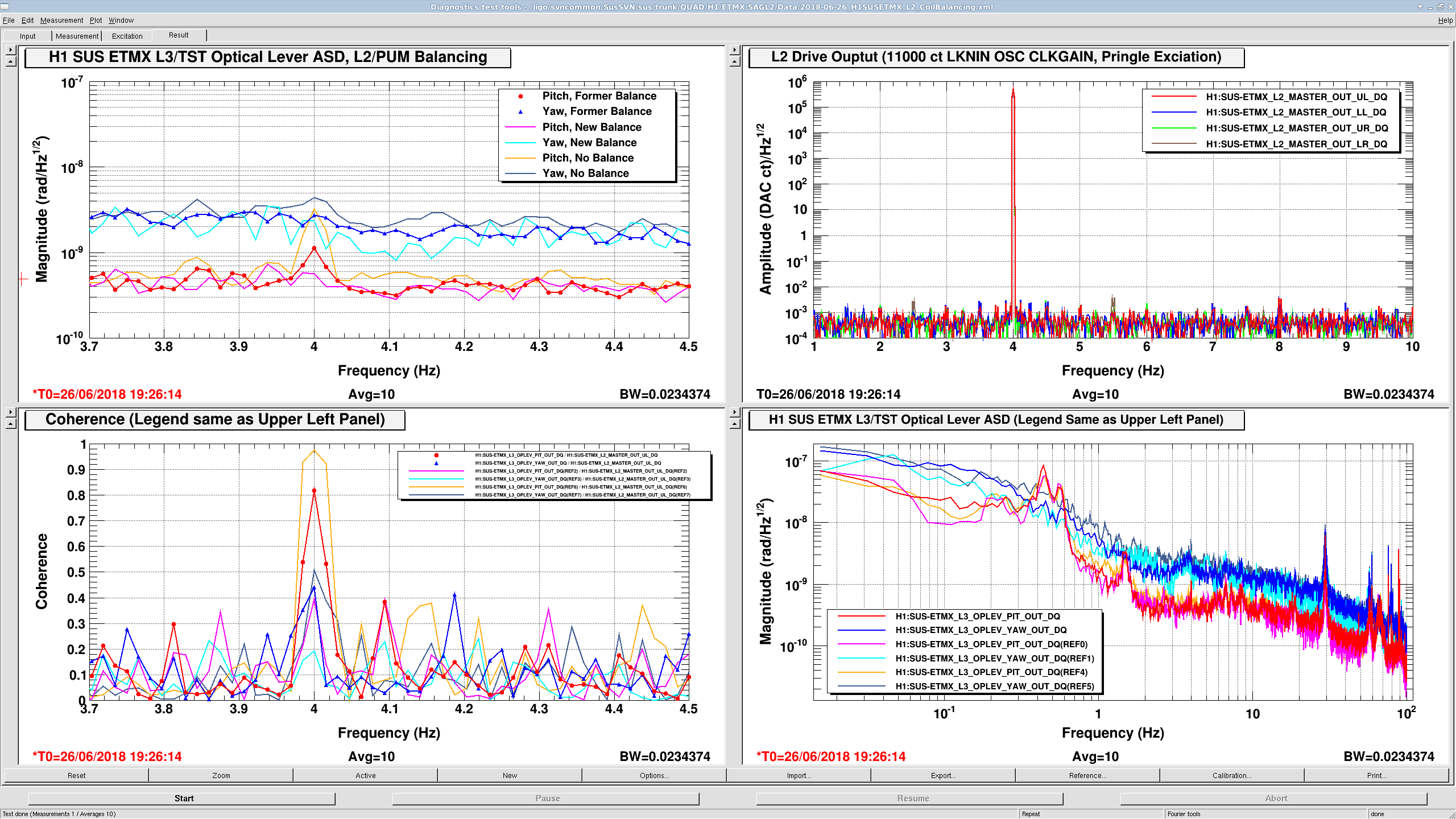
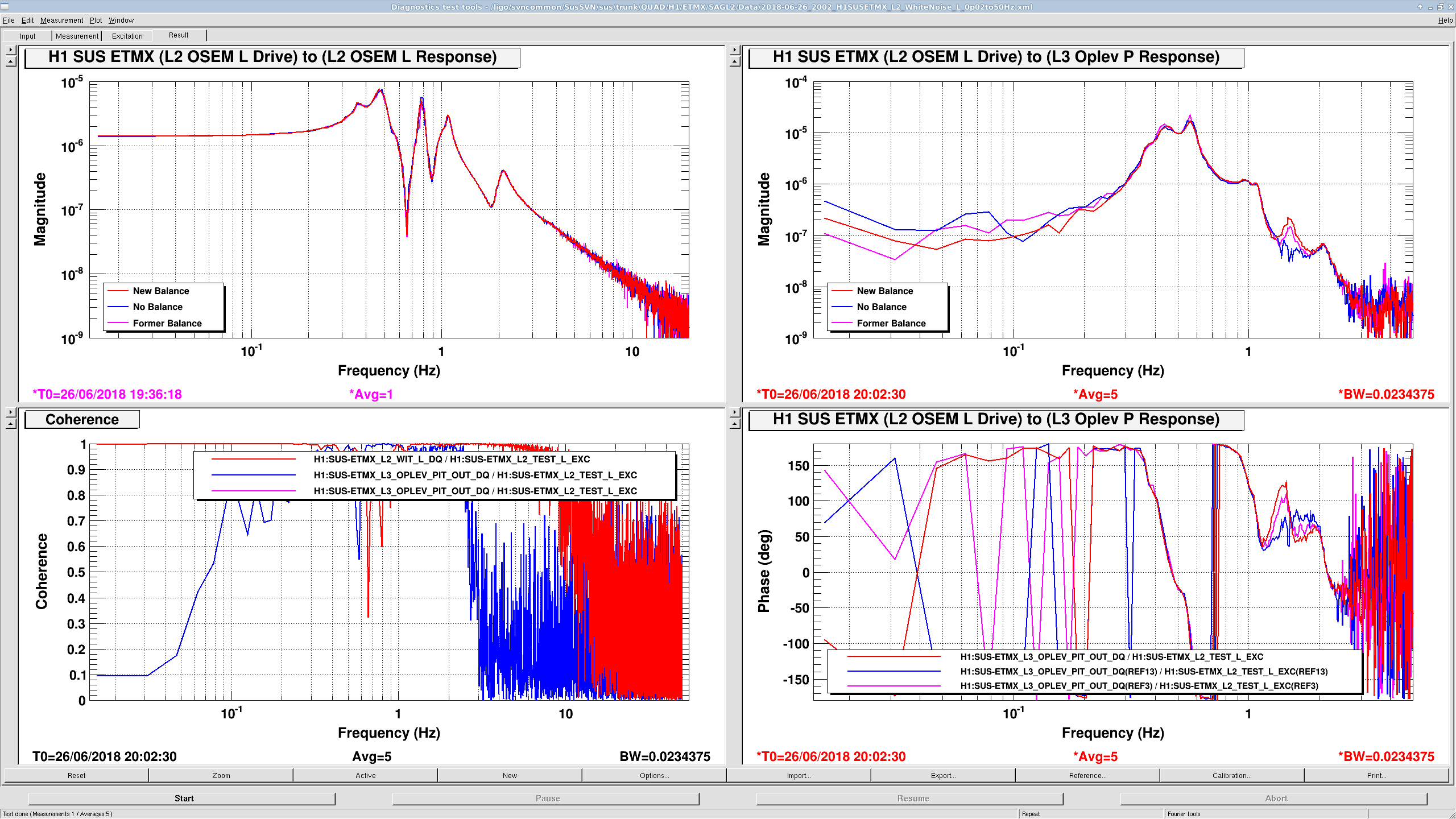
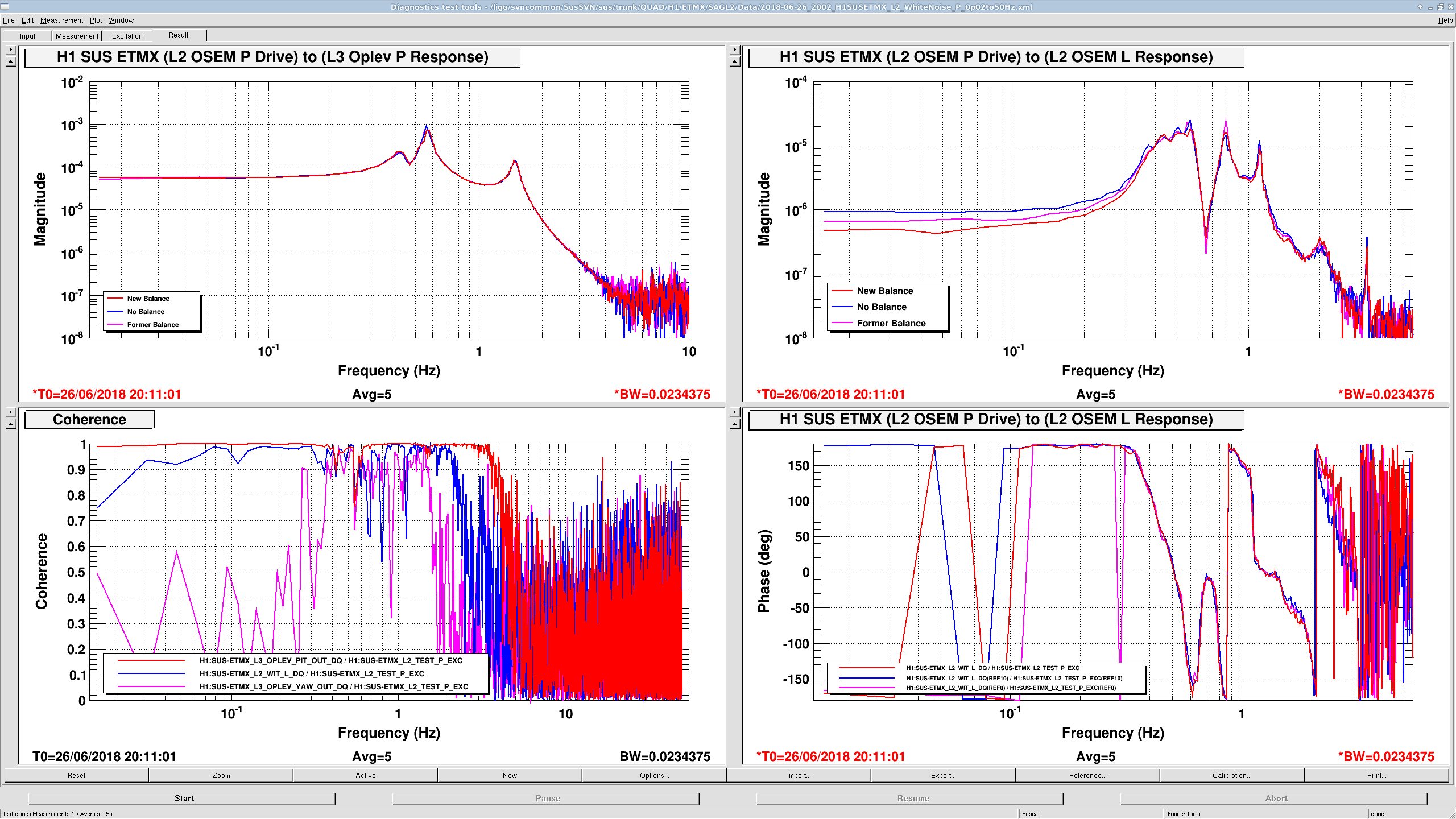
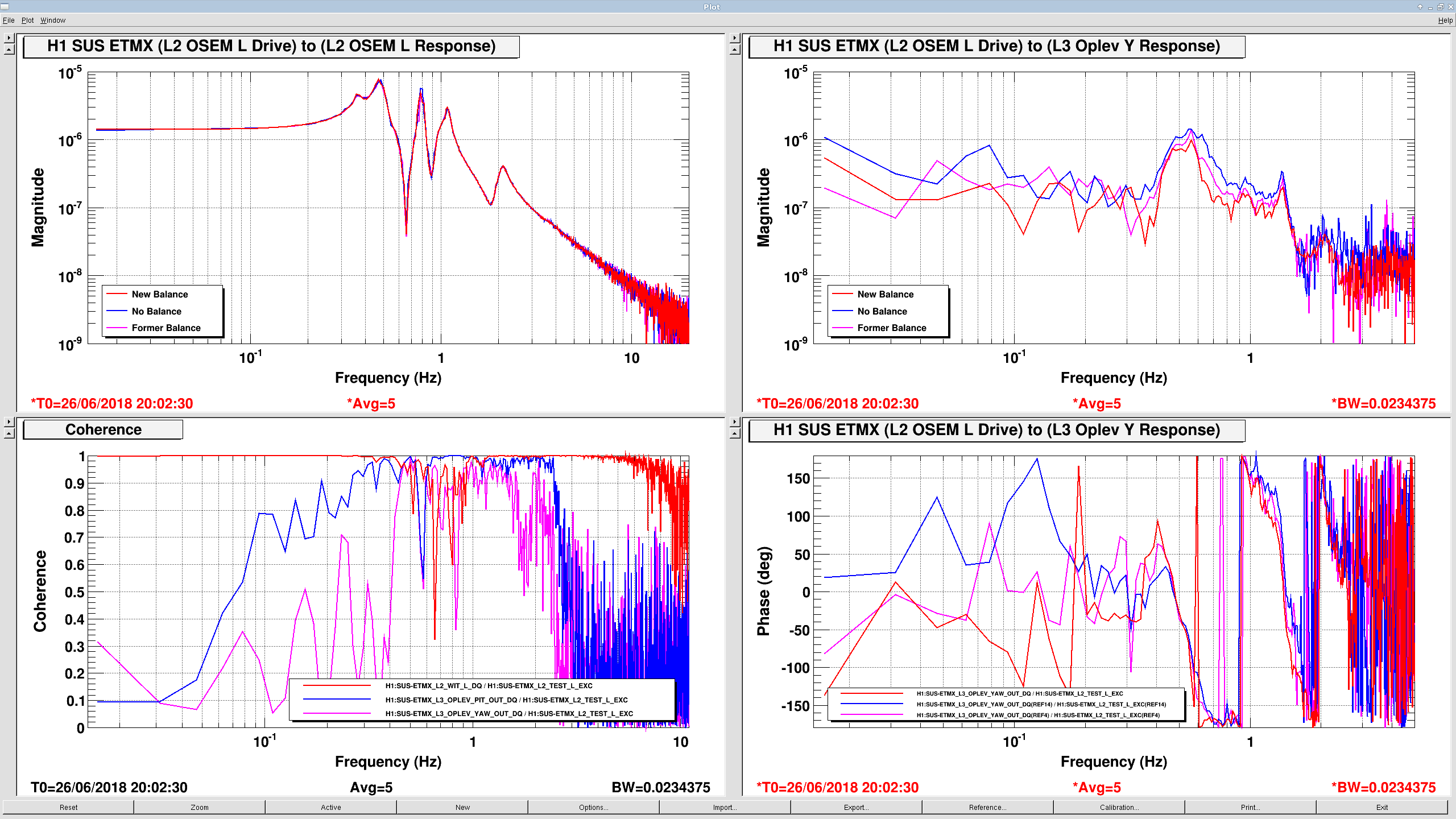
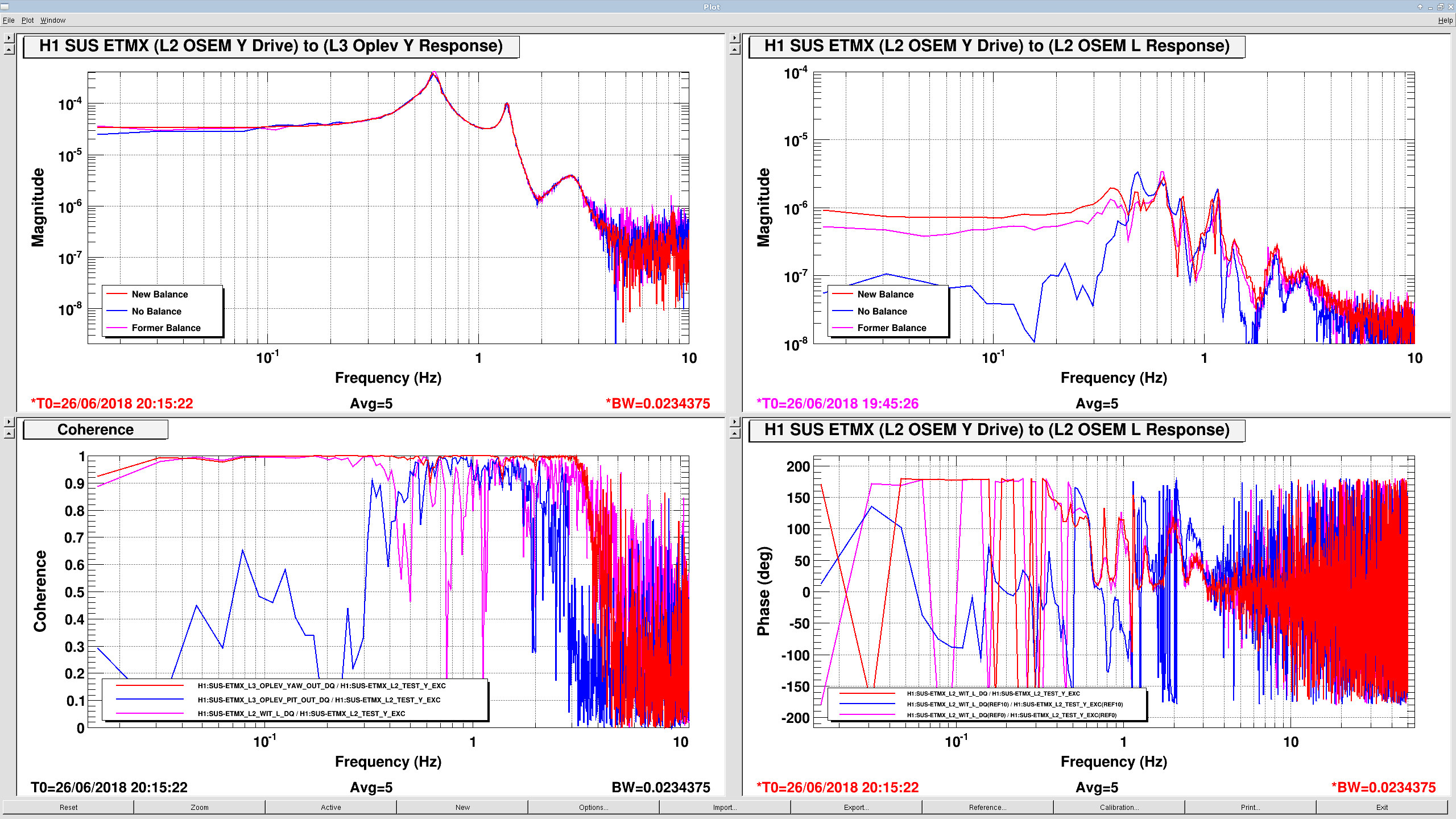
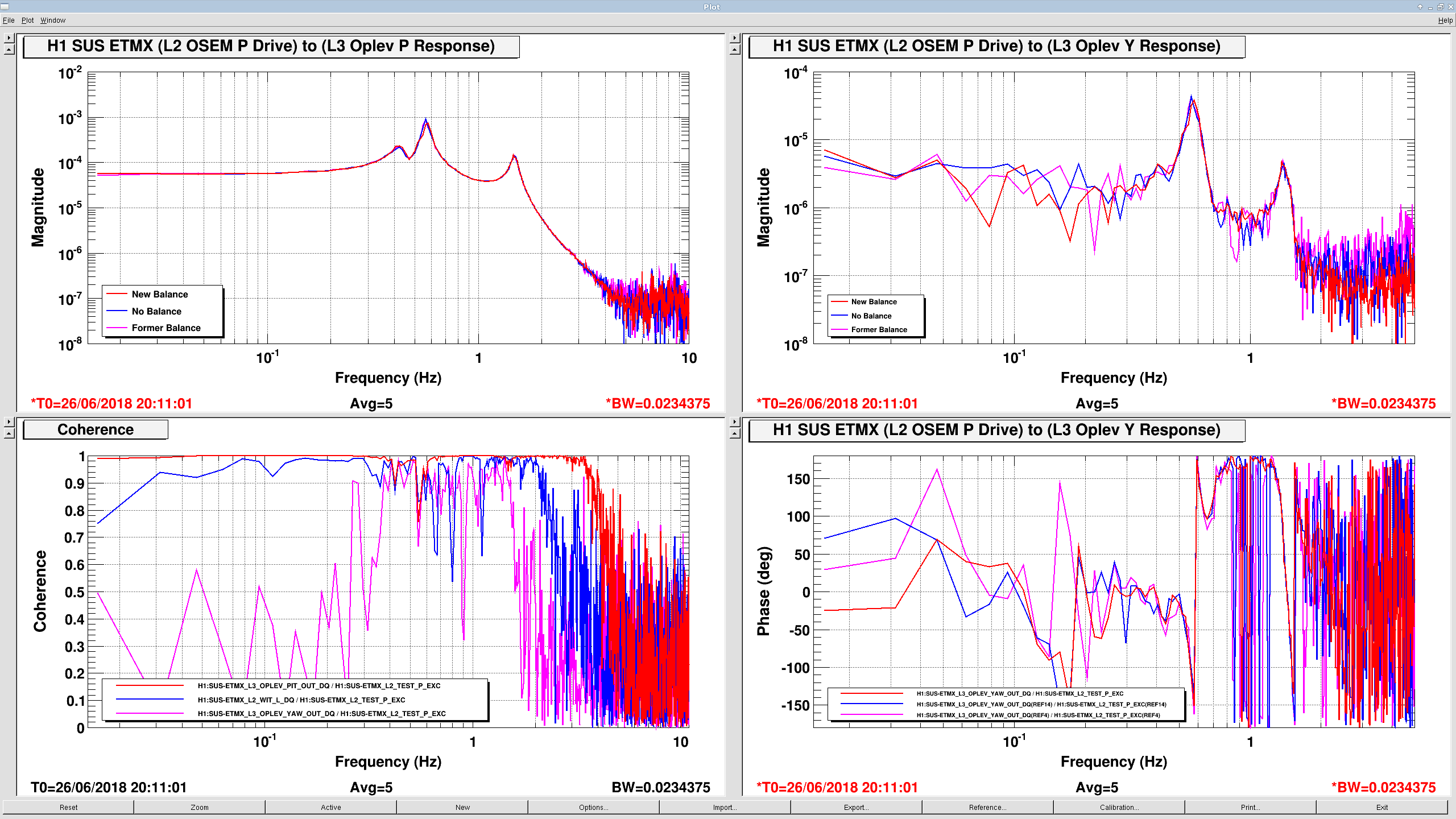
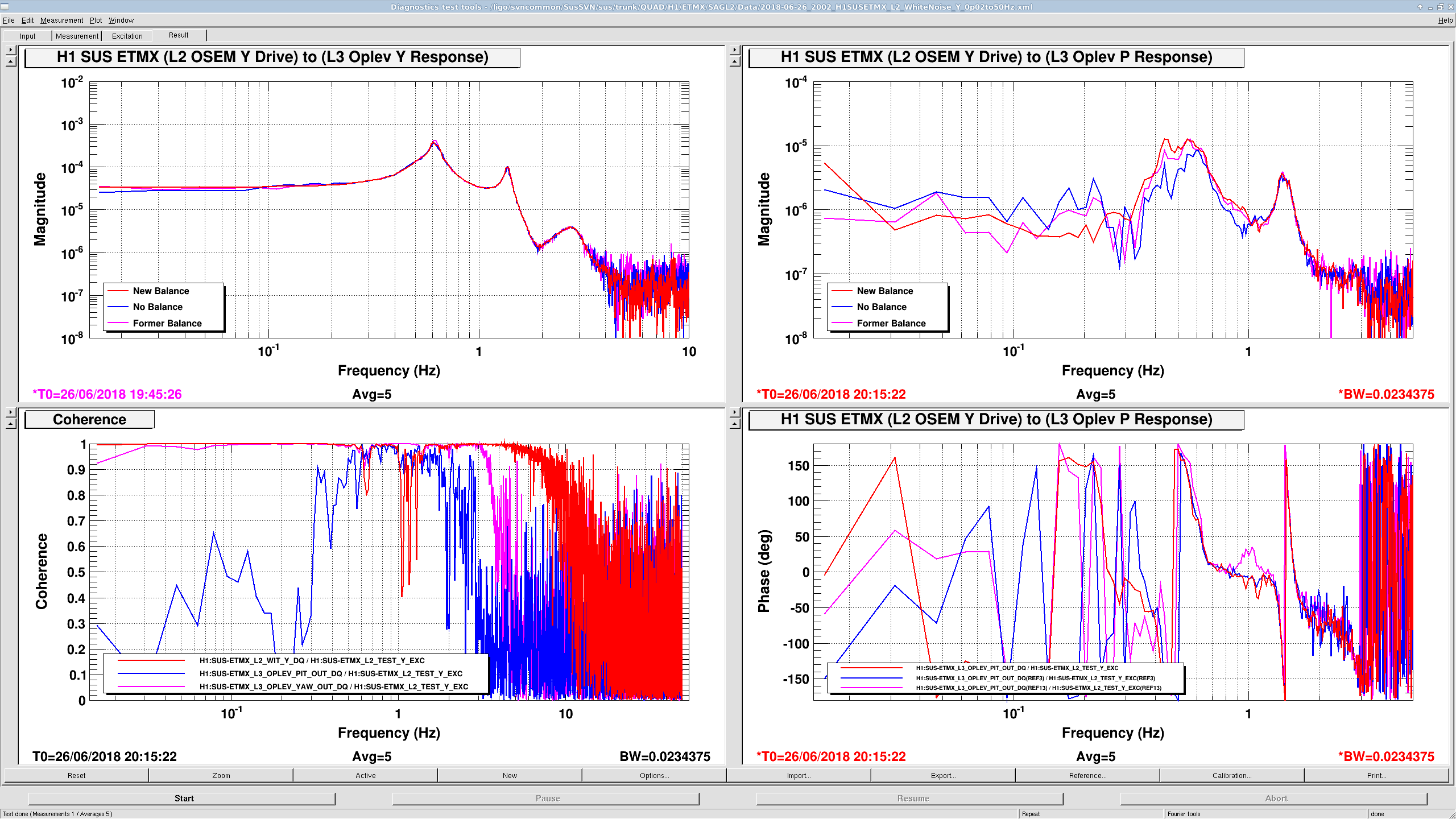
J. Kissel Using the "4 Hz sinusoidal drive, demodulated in pitch and yaw of optical levers" method (LHO aLOGs 11392 and 9453), I've re-balanced the L2/PUM coils after the installation of the new test mass and annular reaction mass. The results are not so different than before, Former New % Diff (100*(new-old)/old) H1:SUS-ETMX_L2_COILOUTF_UL_GAIN +1.034 +1.05608 2.1354 H1:SUS-ETMX_L2_COILOUTF_LL_GAIN -1.014 -1.01467 0.066075 H1:SUS-ETMX_L2_COILOUTF_UR_GAIN -0.98575 -0.984672 -0.10936 H1:SUS-ETMX_L2_COILOUTF_LR_GAIN +0.96626 +0.946061 -2.0904 Attached are the same characterization metrics as newly expanded for ITMY L2/PUM (see LHO aLOG 42527), - The "traditional" ASD of optical lever pitch and yaw at the drive frequency - The "new" transfer functions, from L2/PUM drive to the L3/TST optical lever P and Y. Note that I've driven Yaw this time, as well as Pitch unlike the ITMY measurement. Sadly, the yaw drive couplings are just as interesting. Aside the first "traditional" attachment, the files are organized in terms of cross-coupling. The "money" plots for these quadrants are the upper right panel which shows the cross coupling. The L2P / P2L transfer functions are first, the L2Y / Y2L transfer functions are second, and finally the P2Y / Y2P transfer functions (yes, P2Y TFs are coherent at least at some frequencies!). One must, of course, take the Long response transfer functions with a grain of salt, since they're measured at the L2 / PUM stage instead of the more interesting L3 / TST stage, but we can at least see the differences between boil balances, which is still interesting. All transfer functions are either in [um / (DAC ct)] or [urad / (DAC ct)]. I'll do this later in post-processing and comparing against the model, but in case folks are anxious, the calibration gain for the L2 stage is % [rad/urad] [DAC gain ct/V] [Coil Driver V/A] [Magnet A/N] calibration [(rad/urad) . (DAC ct / {N or N.m})] = ( (1/1e6) * ( (2^18/20) * (1 / 0.000268) * (1/0.0309) ) )^-1 = 0.00063181 [(rad/urad) . (DAC ct / {N or N.m})] where one *divides* the measurement my this number. Also note the gain doesn't depend on translation or rotation because the EULER2OSEM matrix takes care of this as it includes the torque lever arm.
Images attached to this report