Summary:
There are electronics couplings from OSEM drive in HAM3 to two each of OSEM top sensors for MC2 and PR2.
This is not a big deal for L, P and Y drive as four drives from UL, LL, UR and LR mostly cancel with each other.
For pringle drive, four coils add up and it seems to affect coil balancing measurements by a tiny bit as the drive is sensed by top OSEMs via electronics coupling (in addition to mechanical), and this shakes the mirrors via damping loops. This seems like a measurable but small effect, again not a big deal.
But probably it's a good idea to do coil-balancing using pringle drive with notches anyway at least for this chamber.
Motivation:
My attempt at balancing MC2 M3 using pringle injection (alog 42888) was somewhat unsatisfactory even though the apparent coil balance was done at sub-% level as there's a phase component that I cannot kill by simply balancing coils. Being pringle, that shouldn't be the case. Electronics zeros/poles in different channels are probably only at or somewhat better balanced than % level anyway, but the question is, are we deceiving ourselves by compensating for a large unknown bogus non-mechanical coupling by "balancing" the coils (first attachment)?
Details:
While PSL was down, I measured coupling from all OSEM M2 and M3 output in HAM3 to all sensors in HAM3 that are used for control purpose, i.e. QPDs and top OSEMs. (For the ease of looking at signals, MC CM board was set as if MC was locked at 10W, and MC2 TRANS SUM offset was increased (and I forgot to set it back, which was later found by Jenne) ).
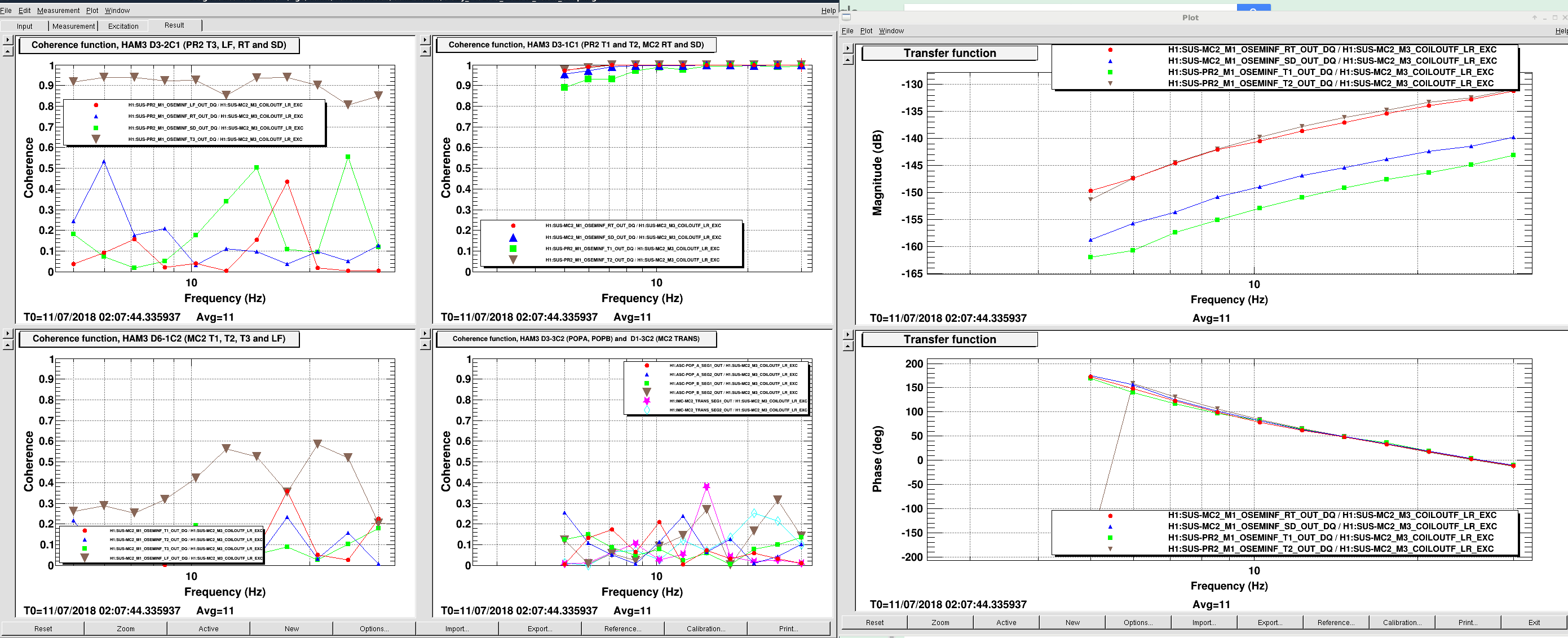
Four specific top OSEM sensors on the same cable (MC2 M1 RT and SD as well as PR2 M1 T1 and T2) were found to be particularly sensitive to other OSEM drives, and it's apparent that this is electronics coupling, not mechanical, from the shape of the transfer function as well as the fact that shaking of MC2 is sensed by PR2 (e.g. 1st attachment, an example of the transfer function from MC2 M3 single coil excitation to all relevant sensors). These couplings mostly show up as L and Y and SD bogus signal in MC2 M1 due to RT and SD sensitivity, P and V and R bogus signal in PR2 M1 due to T1 and T2.
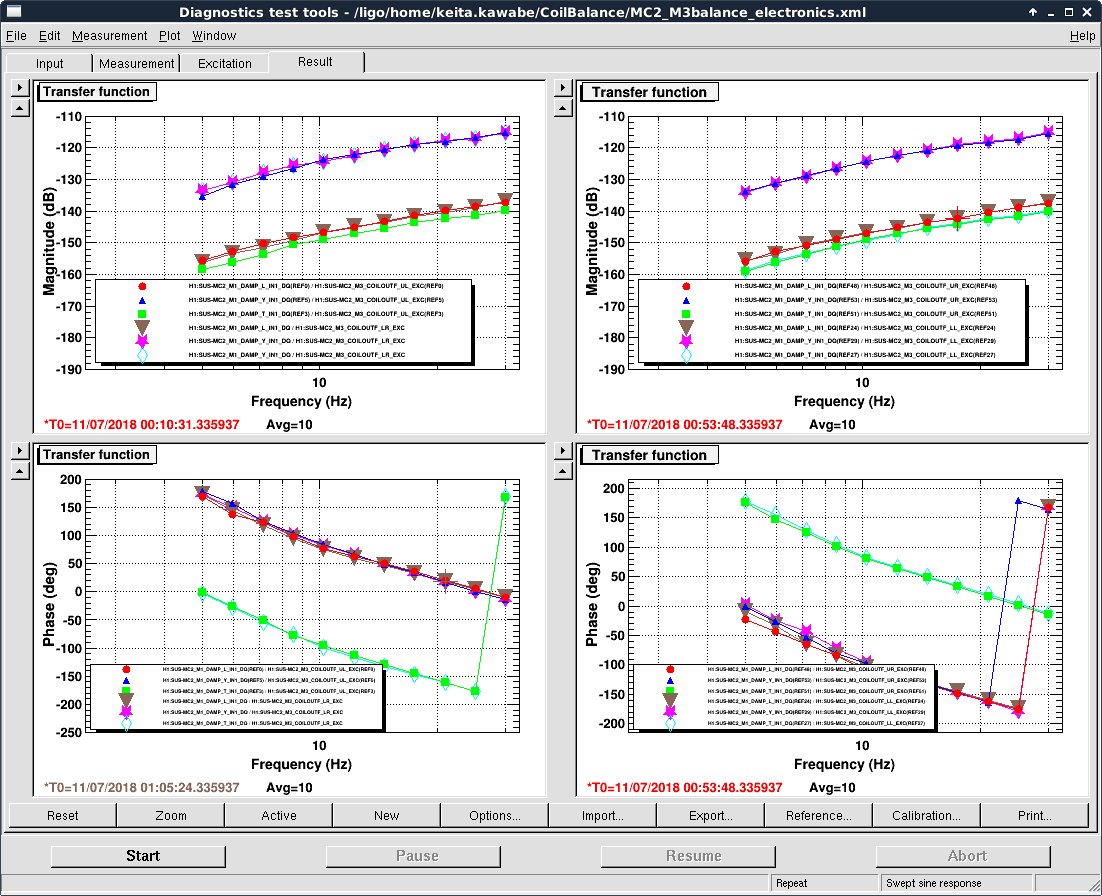
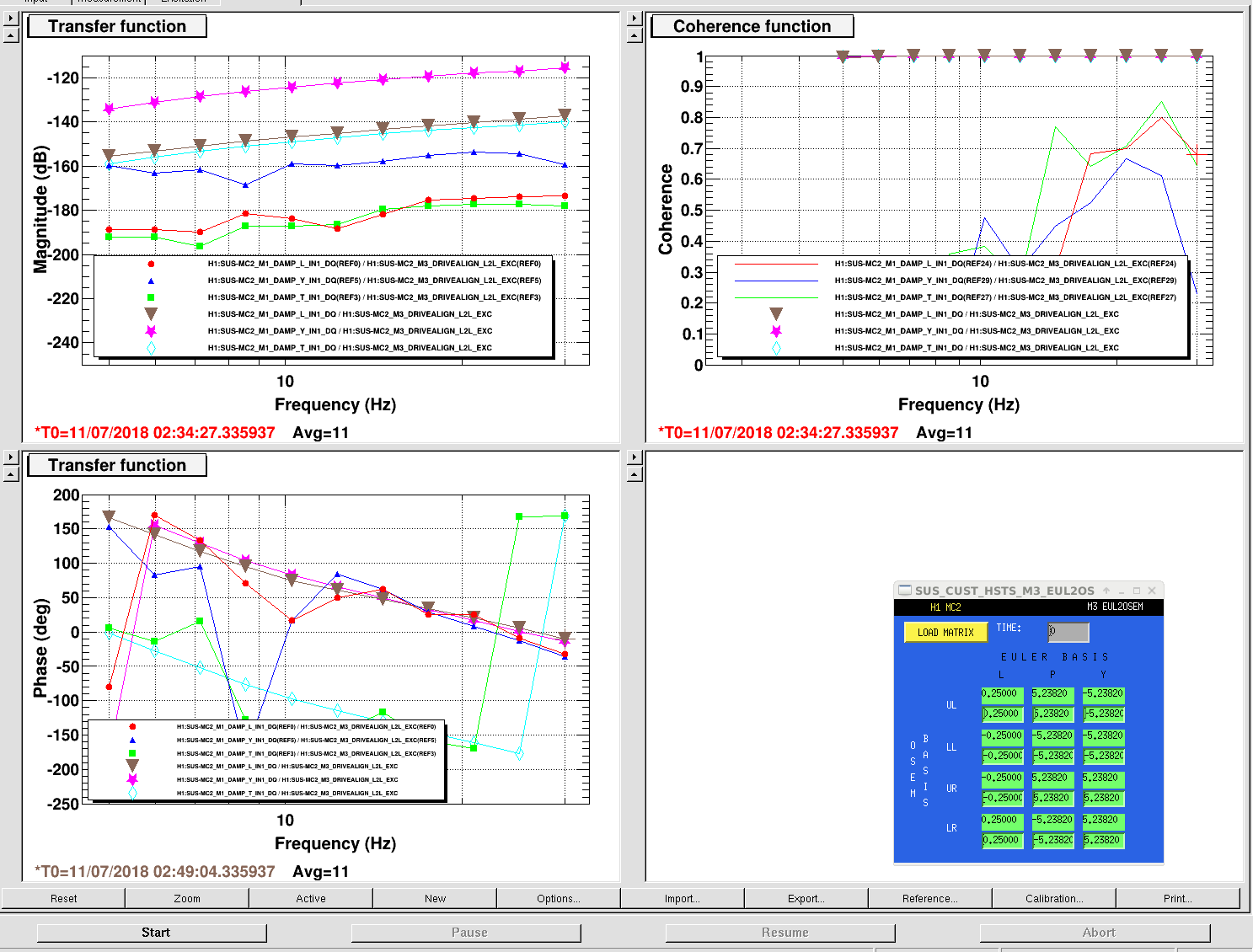
There's not much difference between electronics coupling from UL, LL, UR and LL drive OUTPUT (not input) to any affected sensor. In the second attachment, phase is measured against input (not output) of coil out filter, and therefore the measured phase is flipped between [UL, LR] (left plots) and [UR, LL] (right plots) pairs. This means that the coupling from L, P and Y drive are much weaker than from pringle drive because of cancellation in coil pairs. In the third attachment, low-coherence traces are with L drive, high coherence traces are with pringle drive with the same amplitude excitation.
I put 9Hz notches in MC2 M1 L and Y damp filters, repeated the pringle injection as in alog 42888 with the best apparent balance so far and measured the coupling from pringle to MC2 TRANS YAW (which is a measure of PIT balance) and IMC_L with notches (red, green) and without (blue, black). The power was only 2.6W instead of 10 this time, so S/N is worse. Anyway I don't see any change for IMC_L. For YAW error the amplitude didn't change but the phase change from ~100 deg to ~50. So the impact was not entirely negligible for YAW, and we should be able to minimize the coupling further. But since the amplitude didn't change much if at all, it doesn't sound to me as if this would be a real problem, now we're talking about sub-% level residual due to something other than bogus coupling, e.g. electronics components imbalances,
BTW something*10^-3 is about two orders of magnitude larger than the HSTS model suggests for M3 pringle to YAW, though. I plugged measured electronics coupling from MC2 M3 pringle excitation to MC2 M1 Y into TF model from M1 Y drive to M3 Y motion in HSTS model (4th attachment orange circles) and compared against M3 Y drive to M3 Y motion (blue trace). It seems like orange circles are about 5 orders of magnitude smaller than the blue trace, not 3 orders. I don't know what to tell from this.
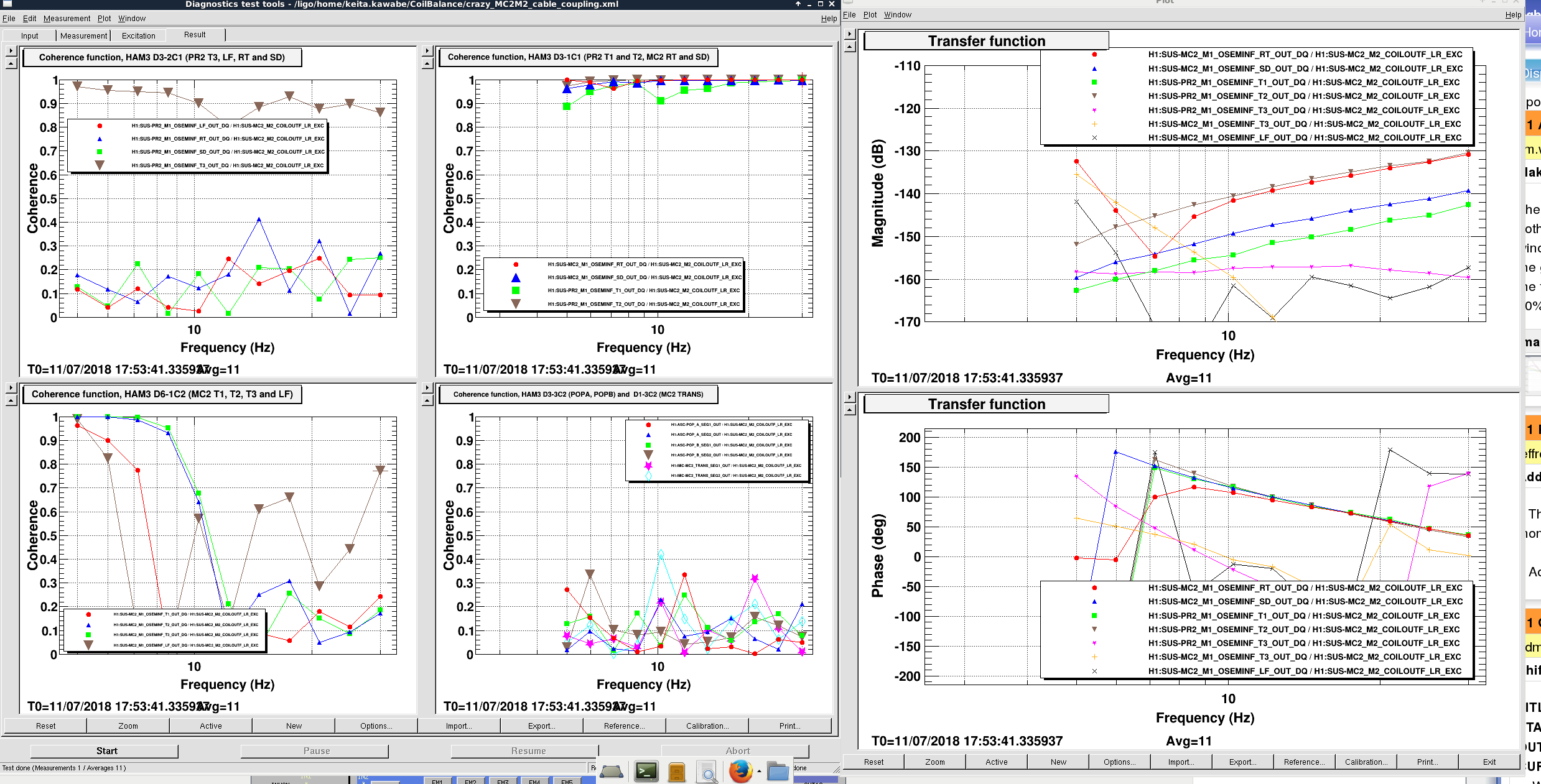
For M2 pringle, you start to see what seems like a legit mechanical coupling superimposed with bogus coupling in some of the M1 sensors below 10Hz (last attached).