stefan.ballmer@LIGO.ORG - posted 18:34, Thursday 20 September 2018 (44077)
Inverting Ring heater step response to shorten response time.
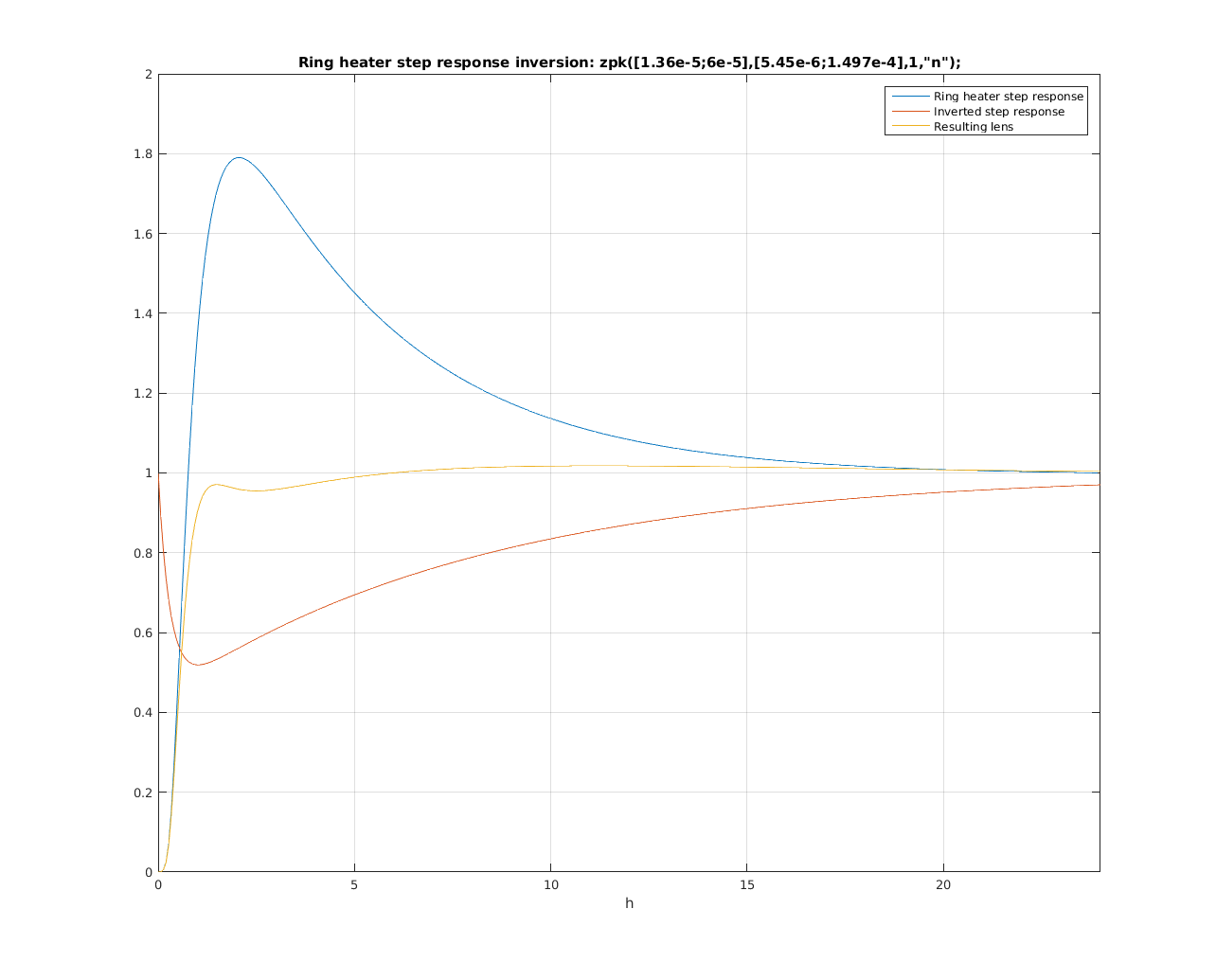
Danny, Stefan We fitted the ring heater step response that we found in /ligo/home/aidan.brooks/OneArmTest/h2hwsey/2012_08_09_hws_rh_test/matlab_workspace.mat in the frequency domain. The essential low frequency features are well captured by a - zero at 5.45e-6Hz - pole at 1.36e-5Hz - pole at 6.00e-5Hz We can therefore design an inverse filter that does not overshoot (high frequency gain equal low frequency gain equal 1) by using - pole at 5.45e-6Hz - zero at 1.36e-5Hz - zero at 6.00e-5Hz - pole at 1.497e-4Hz The resulting lens step response is given in plot 1. Note that this inversion essentially shortens the full response to about 2h (at the 5% level), while never overshooting (i.e. there is no negative value problem). I would imagine that some more tuning could even improve on that.
Images attached to this report