Evan Goetz, Lilli Sun
The DARM loop sign conventions and the definitions of open loop gain, closed loop gain, and response functions are documented here -> T1800456
We revisited the signs in the DARM control loop and the response functions. In O2, we did all actuation in Y arm. For O3 the TST actuation was switched to X arm. Hence there are two separate sign issues: (1) is the actuation in UIM/PUM (push) or TST (pull), and (2) is it in X (+) or Y (-) arm. We had too many sign definitions in the code. The arm signs and the output matrix signs can be combined together. This has been fixed in actuation.py
By definition, we have G=A*D*C and the negative feedback "-" is not included in "A". We fixed the code to keep things consistent with this convention. Correspondingly, we have open loop gain = -G (fixed in the open loop gain processing script), closed loop gain = -G/(1+G), response function R = (1+G)/C (fixed in computeDARM and RRNom).
After all these changes, our model matches the measurements. The phase at unit gain frequency is near -180 deg (see meas vs model plot).
We processed the new calibration measurements taken by Jeff on Oct 23, and ran GPR using the both sets of measurements (Oct 12 & 23) after the model files are updated with MAP values.
At last, we tested RRNom with reference model. The plots do not look good because the measurements we have are poor (see corresponding sensing corner plot and actuation GPRs).

Note: After rerunning the MCMC again, the weird patches in the sensing corner plots disappear (Oct 12 measurement). This might be caused by the poor measurement. Keep in mind and check in the future.
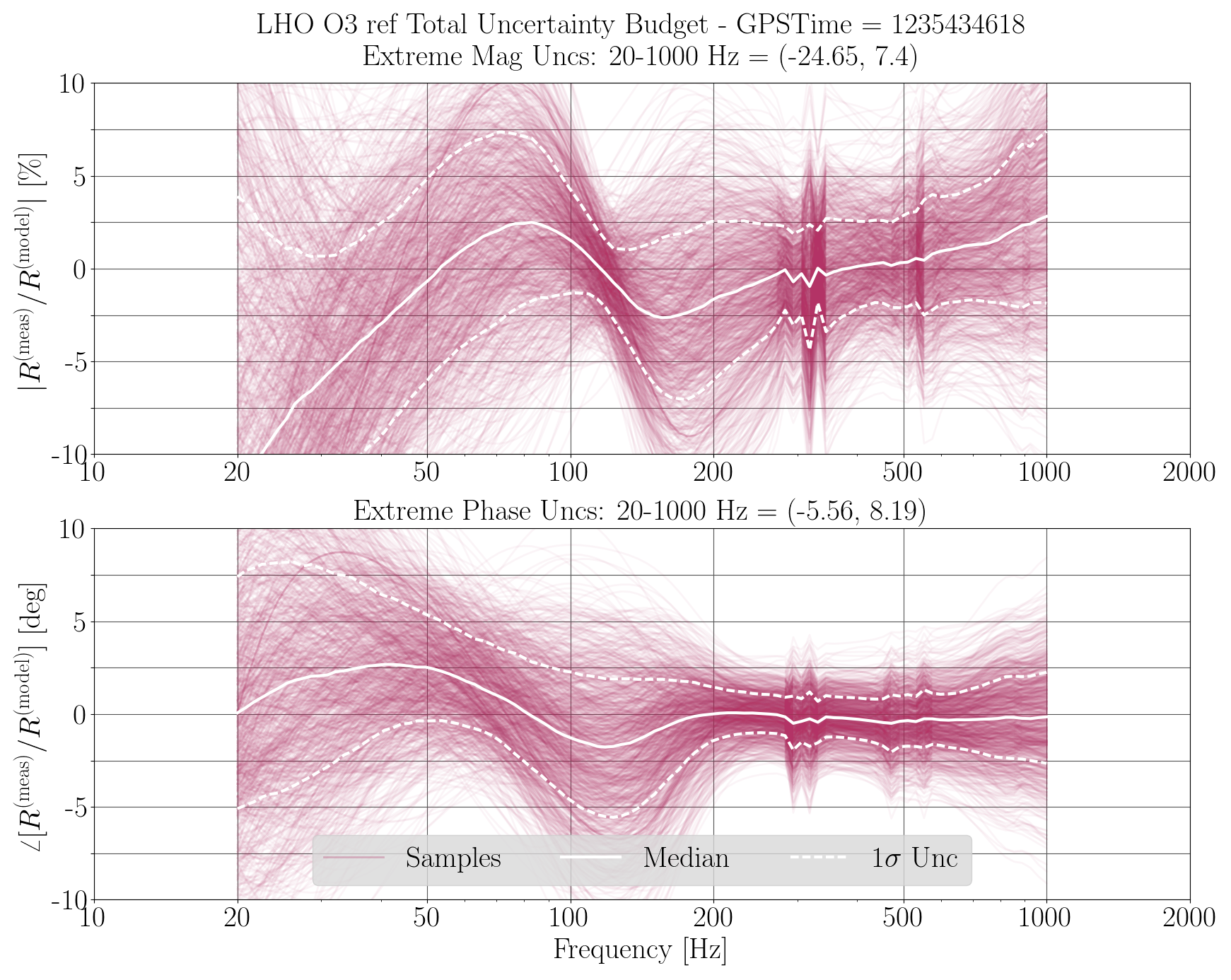
The high uncertainty at low frequency definitely begs for the need of better precision measurements of the actuation stages at low frequency. We had that during O2, but right now we only have the single, quick-n-dirty measurement of the actuation stages.