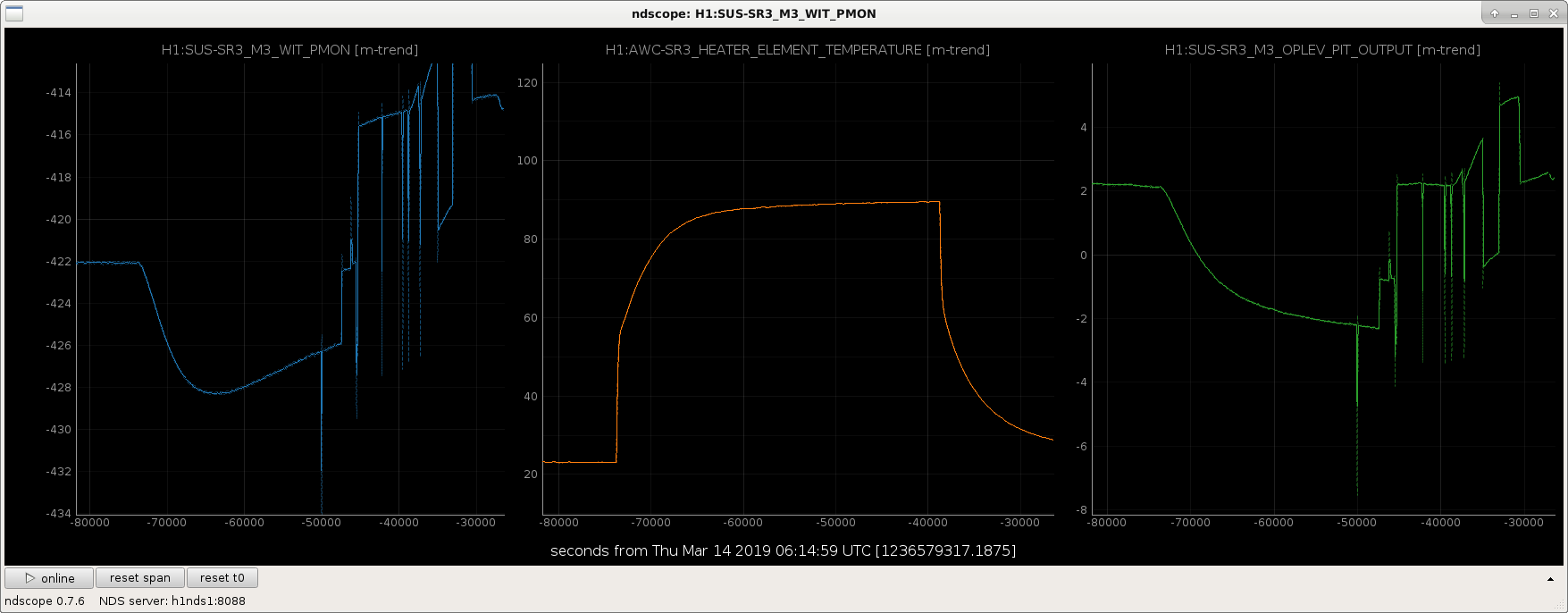
Last night we switched the SR3 heater on at the end of the shift, the aim was see how it affected some frequency and intensity lines at 4.5kHz and 3.25kHz we have been monitoring recently for tuning TCS. The heater input power was set to 5W to produce a ~360K heater element temperature which we believe is its full range.
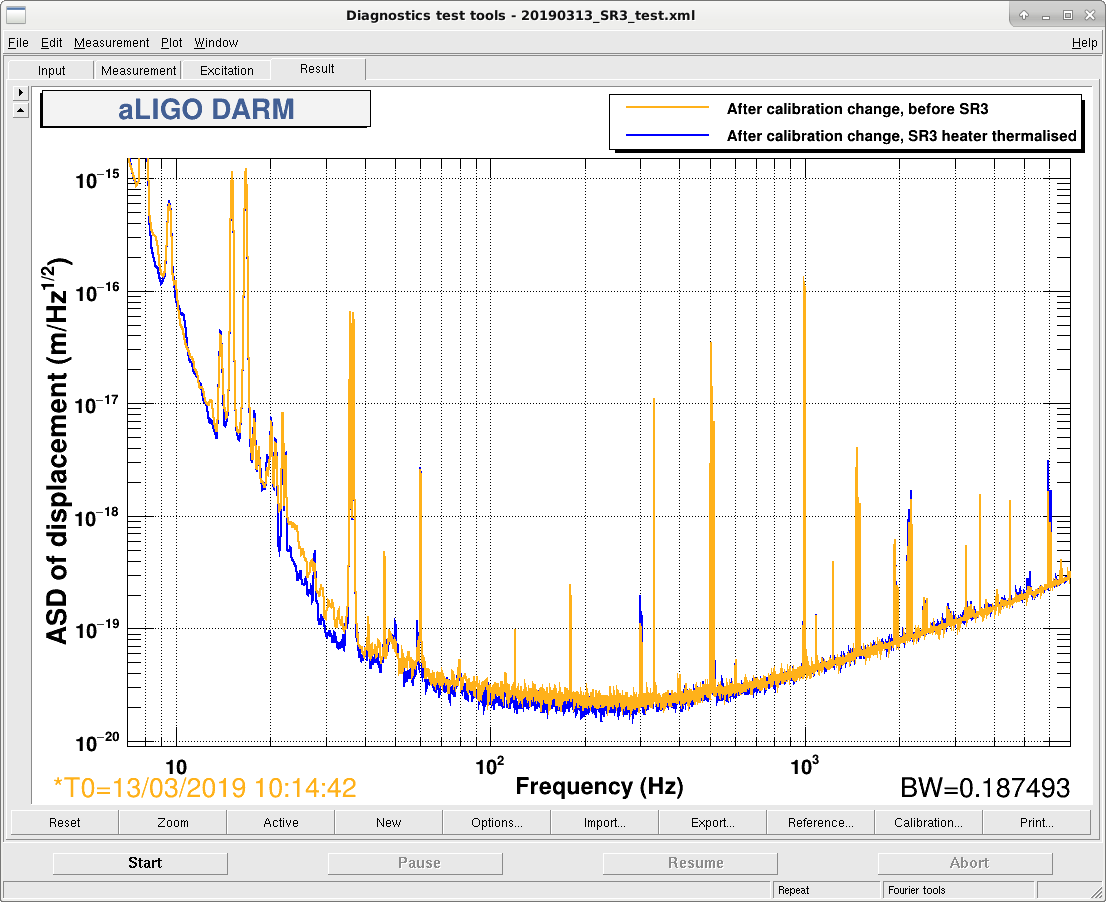
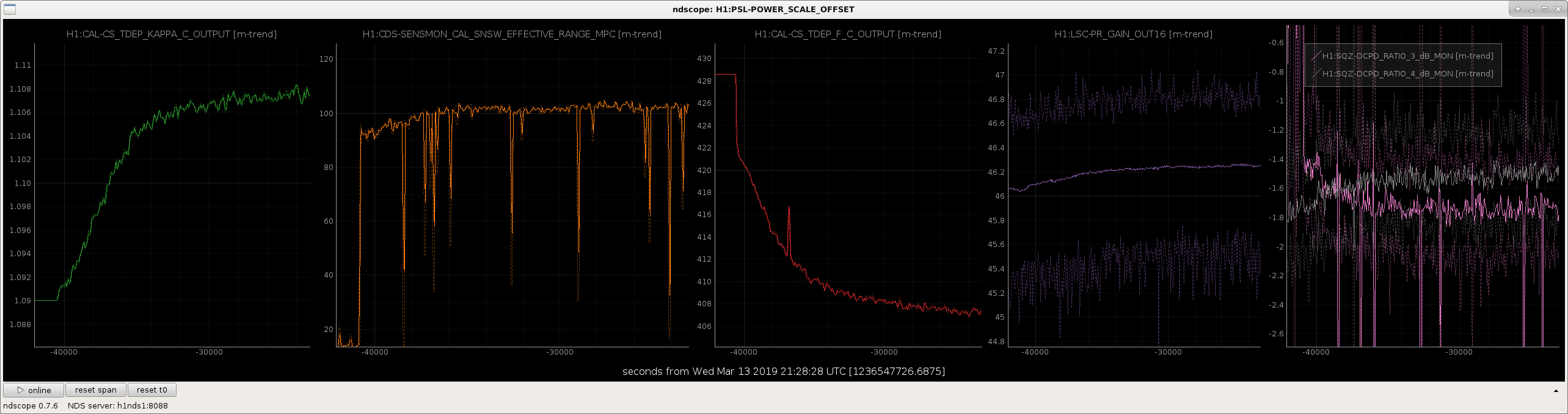
In the end we actually saw an improvement at 20~300Hz in DARM, which was surprising. As mentioned by Jenne we thought this may be due to finding some better alignment but it seems like this may actually be the thermal actuation providing the gains. What noise actually improved down at 20-30Hz is not known. Above this it is likely because of the optical gain and PRG increases. Squeezing was being injected at the time, looking at two of the squeezing monitors (3 is 764Hz and 4 is 4680Hz) we see the low frequency squeezing increased slightly whereas the high frequency reduced. Perhaps there is some SRC detuning going on during this? Confusingly the SR3 heater also increased the PRG.
Before declaring this a win we plan to repeat the SR3 test using the SR3 cage servo tonight, hopefully we see similar results...
I tested the SR3 cage servo after a lock loss. I cleared the history (H1:SUS-SR3_M1_DITHER_P_OFFSET) which has for a long time been around 30. This pitched SR3 down so I brought it back up to the nominal oplev value in pitch/yaw. The slider values are now 437.8 and -151.8 in pitch and yaw. Relocking the IFO with these values seemed fine. I poked the pitch sliders and the cage servo brought it back, it is now switched on for locking.
Looking into the SR3 servo some more, the oplev and pitch osems were not agreeing last night when the heater was on. The OSEM says that pitch starts coming back down after some time, whereas the OPLEV says it keeps sagging. Could it be the OSEMS getting hot from the heater?
Anyway, the cage servo has been swapped to use the SUS-SR3_M3_OPLEV_PIT_OUTPUT instead as we feel that's a more reliable witness. The setpoint is 2.2 and the gain 1e-3.
Jenne, Sheila, Jeff B, Ed
People were having a little trouble with the SRC alignment step of initial alignment, so Jenne and I took a look at the cage servo. It looks like it was not fast enough to keep up with the thermal changes caused by the disk heater last night. We increased the gain by a factor of 50, based on the alignment change (seen by the oplev) during the temperature changes last night. This is able to move the optical lever 1.5 urad in ~15 minutes, this should be enough to keep up with the thermal changes.