We took about 4 hours of time for commissioning today:
- Jenne and I did some PUM/ESD crossover measurements for different A2L gains, this was orginally planned as part of the calibration activities yesterday but we didn't get to it then, so took some commisioning time for it today.
- While this was going on, several other activities happened:
- Nutsinee got a measurement of squeezing and anti-squeezing as the CLF demod phase rotated for lower nonlinear gain.
- Nutsinee addressed a problem with the green power stabilization servo, which will probably need to be addressed again.
- Robert and Sharan took photos looking into viewports on HAM6
- Craig measured a few REFL spectra.
- We also in this lock are summing the two refl detectors, which is in the guardian (48762)
A quick summary of the cross over measurements (Jenne, Sheila):
Motivation:
- We do not understand the DARM actuator below 10 Hz well, we know that angular cross couplings have a large impact on the DARM cross overs since turning off our L2A decoupling filters helped with our 4.2 Hz instabilities and helped the calibration of the PUM actuator match the model (which doesn't currently account for angular cross couplings). Jenne did some modeling of the impact of L2P on the pum actuation: 48738 Here is document with some thoughts about the actuator cross couplings and how we could change our decoupling in teh actuator: T1900148
- Turning off the length to angle decoupling meant that we also had to turn off a boost in the PUM stage, which is not ideal since it means that we now have rather shallow offloading of the DARM actuation, and less low frequency gain. I suspect this poor offloading and angle to length decoupling is contributing to at least some of our locklosses when the environment is challenging: 1239507497 According to the (matlab) model of the DARM loop, engaging the boost in the PUM should not be a problem.
- While working on calibration, we measured the PUM/ESD cross over down to 10 Hz (after the L2A filters were turned off) and compared this to the pyDARM model, and we see that there is starting to be a larger discrepancy at low frequencies: 48250
- One hypothesis for why we have a discrepancy in the model of the cross over could be because of a cross coupling through the ASC loops:
- the pum length drive could show up in the ASC loops, either because of the mechanical coupling of length drive to pitch in the actuator or because the angular sensors are sensitive to length.
- The angular loops then drive the pum, where we apply a scalar decoupling gain. We know that there is some frequency dependence of this coupling, and that our decoupling at 5-10 Hz will be worse than at 20-30 Hz, because when we used scalar gains and tried to change the dither frequency used by ADS to below 10 Hz, the angular noise coupling to DARM was increased at 20-40 Hz. So our scalar decoupling is potentially introducing (or at least changing) a cross coupling back from the angular loops to DARM.
Measurement:
- We measured the cross over between the PUM+ UIM and the ESD by driving at L2 LOCK L, see attached screenshot. (This is saved in the CalSVN, we will take some time to compare this to a model soon).
- To test the hypothesis that an angular cross coupling through the A2L drivealign path is impacting our cross over, we then turned off ADS and set the A2L gains to zero, which doesn't actually move the spots on the optics. First we did this for ETMX only (pink traces), then turned off A2L on all 4 test mass PUMs (cyan). We do see a difference in the measured cross over from 7-10 Hz with the ADS gains off.
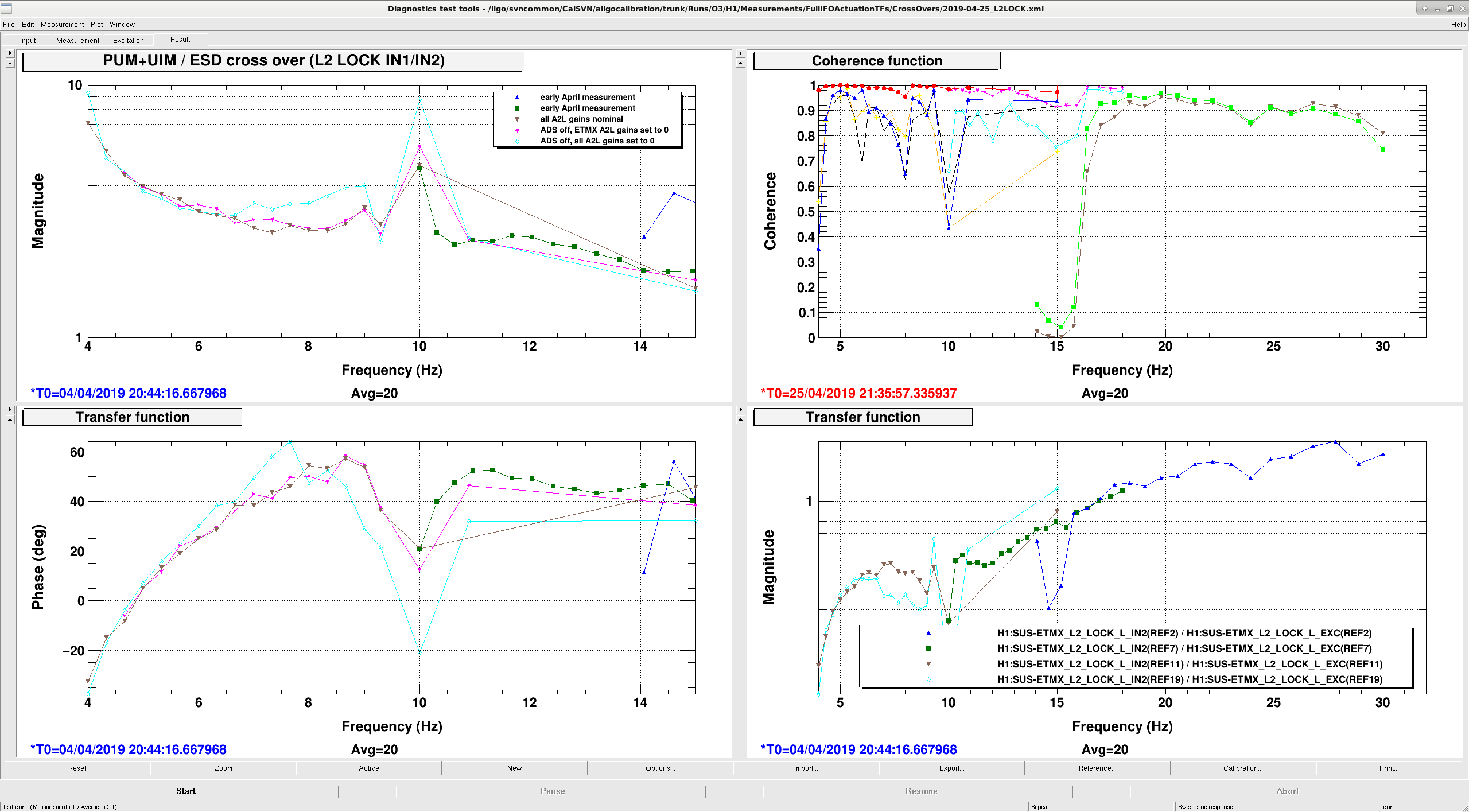
Here are the measurements from this time plotted against a pyDARM model.
The blue line is a model of what the L2 LOCK IN1/IN2 measurement is expected to look like based on the pyDARM model of the actuators. The green dots are measurements of this crossover made on April 3rd, they are plotted here just so that you can see some higher frequency data (we didn't retake any higher frequency measurements)
These measurements could be explained by a coupling of the length drive to either the angle of the optic through a mechanical coupling or to the angular sensor, the ASC loop then tries to actuate in response, but there is a coupling from angle back to length because we are not doing a nice job of a frequency dependent angle to length decoupling. When we turned off the A2L decoupling, by setting the scalar gains to 0 but not running the ADS so that the spot positions stayed in their normal positions. In principle, a more accurate frequency dependent A2L decoupling could be used to reduce this effect.
In 47824 and 47982 we saw that when we turned off the L2A decoupling filters, which increased the gain of the PUM by getting rid of the L2A2L coupling that comes from having our spots well off center and not routing the L2A output through the A2L decoupling, we had a crossover instability around 8 Hz. This was solved by turning off the 4.5Hz boost in the PUM lock filter, which doesn't make complete sense but it is plausible given these emasurements that the problem with the boost was caused by these angular cross couplings, especially if there are features that are not resolved in this measurement.
