M. Ball, S. Dwyer, J. Kissel I've processed sensing function measurements from 2019-07-03 (LHO aLOG 50382) and 2019-07-10 (not aLOGed until now #slpas wrist) in which we measured the DARM loop comparing (a) spot positions on ETMY, (b) increased gain of the DHARD loops, and (c) added theses two new days to previously analyzed comparison between PCALs (LHO aLOG 50446). These studies clearly expose that what the calibration group has been calling a detuned SRC pro-spring for all of O3 is likely all a function of parasitic cross-coupling between angular loops and the DARM length / longitudinal loop. I attach a bunch of plots which show this information. (1) H1_sensingFunction_PCALXvsPCALY_referenceModel_vs_allMeasurements.pdf: And update to LHO aLOG 50446's set of plots comparing measurements of the sensing function using PCALY vs. PCALX as a reference which now includes the most recent 2019-07-03 and 2019-07-10 data. We continue to see that PCALX and PCALY (each divided by separate DARM loop suppressions taken with the same actuator just after) measure the same thing, and again, whatever thing they are measuring is evolving from week to week. I've also added plots of the individual raw measurement, which will become interesting in a moment. (2) 2019-07-11_MCMCTDCFs_vs_CommishEvents.pdf: There have been no commissioning events, but I've added two more weeks worth of measurements to the MCMC fit parameters of the processed PCALY+DARMLS measurement sensing function. This convinces me that (a) we should be a ready to create a new darm loop model, push it to the front-end, and back-propogate the correct for the flaws in the past with DCS, but (b) that there is still time dependence to whatever this feature is -- which begs the question "are we really doing a good job of servo-ing the spots to the same physical location?" (3) 2019-07-03_H1_SpotMove_sensingFunction.pdf: Here's the 2019-07-03 data in which we moved spot positions on ETMY. In these plots, instead of the reference model, I've updated the (python only) model parameters to have a \kappa_C of 0.975, and I've set the "optical spring" frequency to zero. One sees several things here: (a) In the raw measurements, you can see that the only thing changing is the DARM loop Suppression measurement -- the PCAL is remaining consistent -- between spot moves. (b) Changing the position in both pitch and yaw affect the low-frequency end of things. (c) At the final position, more physically centered on the optic, we lose optical gain indicating it's a bad position for losses in the IFO. (d) At the final position, the phase returns to what we would expect of a "normal" detuned spring when the magnitude is still behaving like a spring with finite Q. (4) 2019-07-10_H1_ASCChange_sensingFunction.pdf: Here -- to confirm that this parsitic angular coupling is through the ASC system (perhaps to identify whether it's (i) WFS are sensitive to Longitudinal Motion, or (ii) that there's actual extra angle from the drive) -- we increased the gain of the DHARD P loop, measured the sensing function, then increased the gain of the DHARD Y loop (with DHARD P restored back to normal). (a) again we see only the DARM loop suppression changing (b) Recast as the sensing function, we see that both Pitch and Yaw has an effect; delightfully in opposite directions -- though we can't compare the increase in gain directly in some calibrated absolute sense, given that the loop shapes are so complicated. There's one more old data set I have to process -- on the ETMY spot move day, we measured the L2 and L3 actuation stages during the move to confirm that the ETMX actuation strength. There's no reason for it to have done so, and #spoileralert it didn't, but I'll make the plots eventually just the same for future talks about this. Matt and Sheila are trying their best to form a model of all this cross-coupling, but it's an hefty challenge for even the best of modelers -- which none of us are: radiation pressure, quad pendulum dynamics, spot positions, point absorbers, non-diagonal loops ... it's nasty!

We think that this feature is due to the angular sensor having a sensitivity to DARM rather than due to a cross coupling from length to angle in the suspension. It certaintly doesn't seem to be from pcal miscentering as Jeff said above.
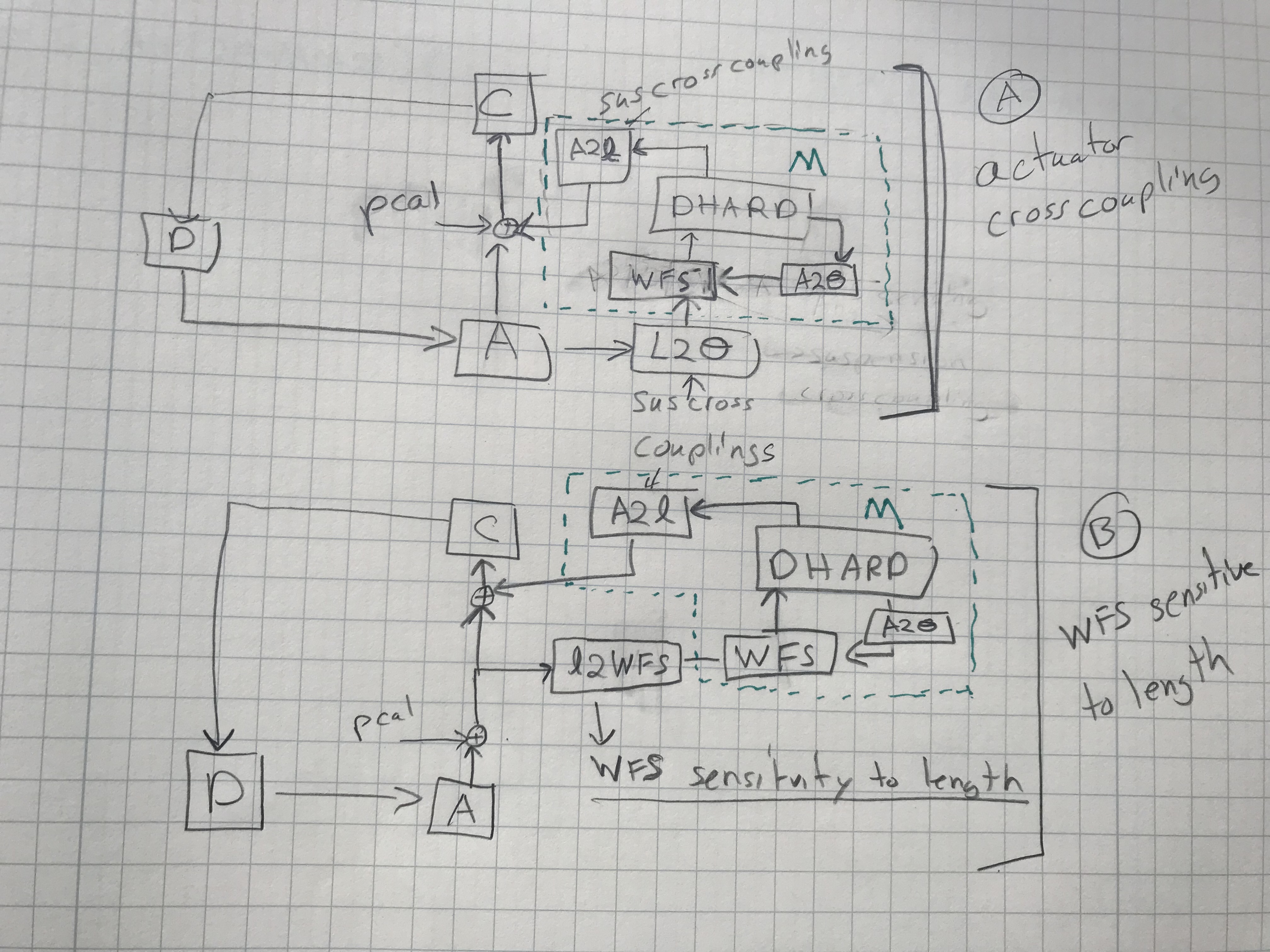
In the attachment the upper block diagram shows the cross coupled loops if the main coupling mechanism from length to angle is in the suspension actuation, the lower block diagram is if the largest cross coupling is due to length sensitivity of the angular sensors.
In both diagrams the open loop gain of the angular loop is G_\theta = WFS*DHARD*A2\theta, and in both diagrams the green dashed box encloses part of the loop with a transfer function: M= WFS*DHARD*A2l/(1-WFS*DHARD*A2\theta) which is part of these diagrams that depends on DHARD gain.
This table has expressions for how the calibration measurements should depend on M:
| angle to length cross coupling in suspension | DARM sensitivity of WFS | |
| DARM closed loop suppresion (1) | 1/[1-D*(A+L2\theta*M)C] | 1/[1-D*A*(1+l2WFS*M)C] |
| pcal to DARM (2) |
C/[1-D(A+L2\theta*M)C] |
C(1+l2WFS*M)/[1-DA(1+l2WFS*M)C] |
|
pum actuation to DARM (3) |
A_pum*(1+L2\theta*M)*C/[1-D(A+L2\theta*M)C] | A_pum*(1+l2WFS*M)*C/[1-DA(1+l2WFS*M)C] |
| sensing function (ratio of 2/1) | C | C(1+l2WFS*M) |
| pum actuation function (ratio of 3/2) | A_pum*(1+L2\theta*M) | A_pum |
For a length to angle cross coupling that occurs before the pcal actuation point (like a suspension cross coupling) the actuation measurement will appear to depend on the ASC gain, but the sensing function will appear to be independent. For a length to angle cross coupling that happens after the pcal injection point (like a length sensitvity of the wave front sensors), the sensing function will appear to depend on the ASC loop gain but the actuation function will seem to be independent, which is what we have seen with these measurements.
Analysis of the ETMX actuation strength with spot moves can be found in LHO aLOG 50601.
Very nice work and a great expedition into the realm of low-frequency MIMO calibration.