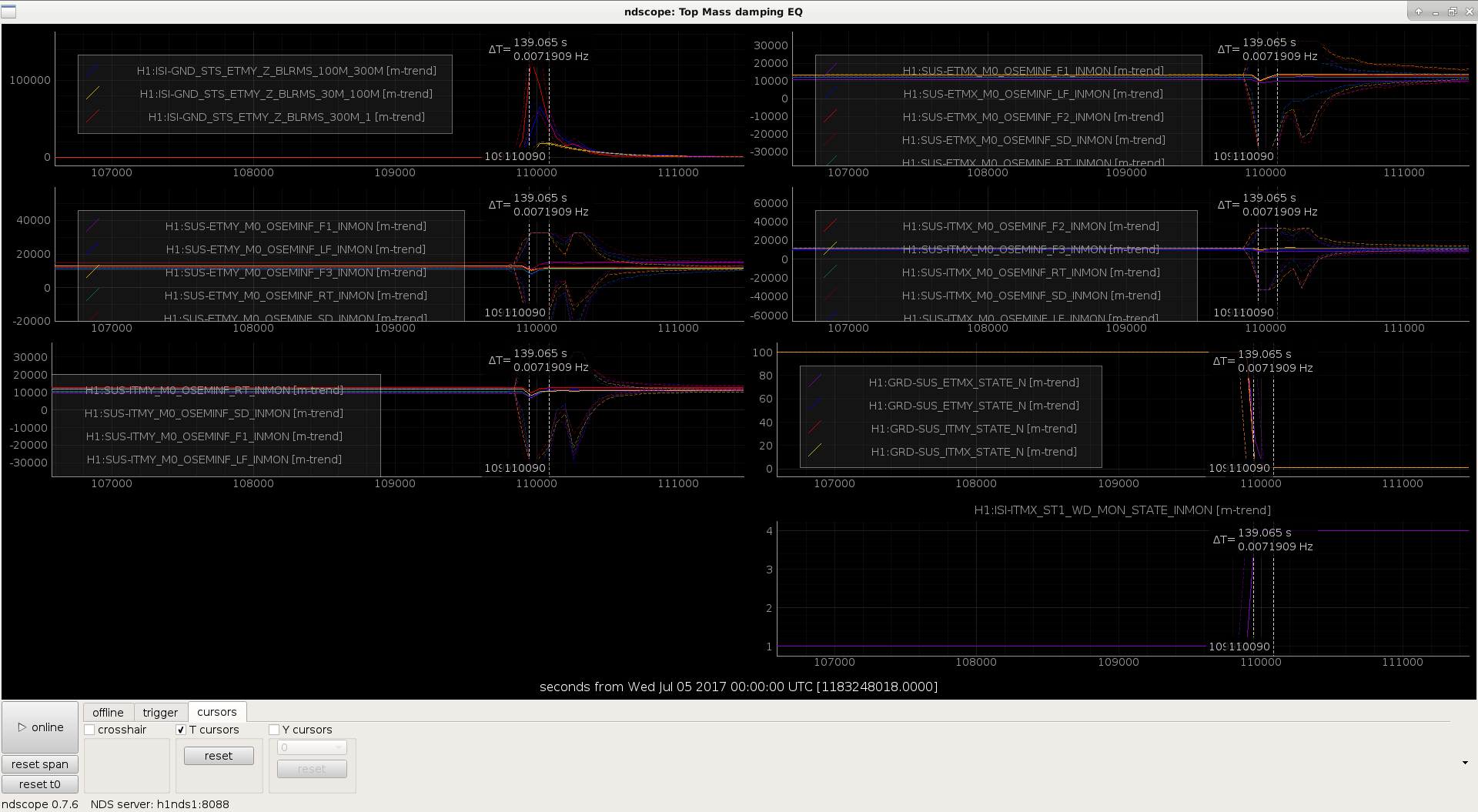
Summary: Local ground velocities at LHO were considerably larger in the Idaho EQ on March 31 55838 than in the 2017 Montana EQ, 38248 The top mass damping stayed on for all 4 quads this time, and the osems were swinging rail to rail for about half as long as they did in 2017, despite the faster ground velocities.
Ground velocity BLRMS at LHO:
| Dillon Mt July 2017 | Salmon River Mountains, ID March 2020 | |
| 30mHz-100mHz | 19um/sec | 50um/sec rms |
| 100mHz-300mHz | 61um/sec | 180um/sec |
| 300mHz-1Hz | 20um/sec | 120um/sec |
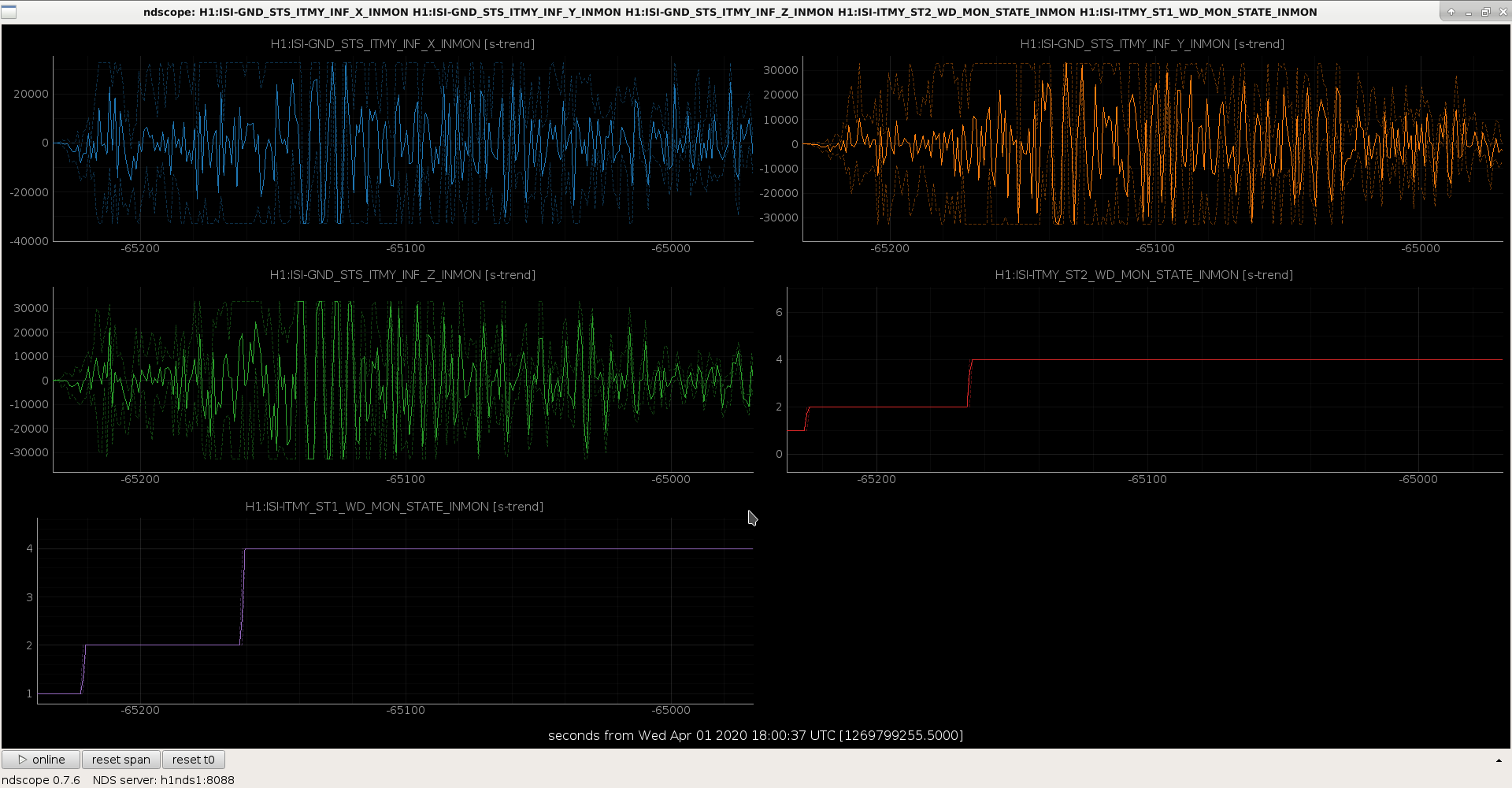
The Montana numbers are from 43514 the attachment shows the Idaho EQ velocities. Although the local ground velocities at LHO were considerably larger for the Boise quake, our suspension top mass damping stayed on for the duration of the EQ. Keeping the top mass damping on in these situations was a main goal of the watchdog and guardian changes made after the Montana EQ.
I tried to make a comparison of the peak to peak motion of the top masses, but the osems are swinging out of range in both EQs. The easiest metric to compare is how long they were swinging from rail to rail, which was about 140 seconds in the Montana EQ where top mass damping was off and about 140 65seconds in the Idaho EQ. We could do some fitting of the actual data to estimate the peak velocities in both cases, I might try that next week. For now we can take this as an indication that keeping the damping on helped us to swing rail to rail for a shorter time this time around.
Usefull info for future reference:
We can use nds2 with ndscope following instructions here (Thanks!)
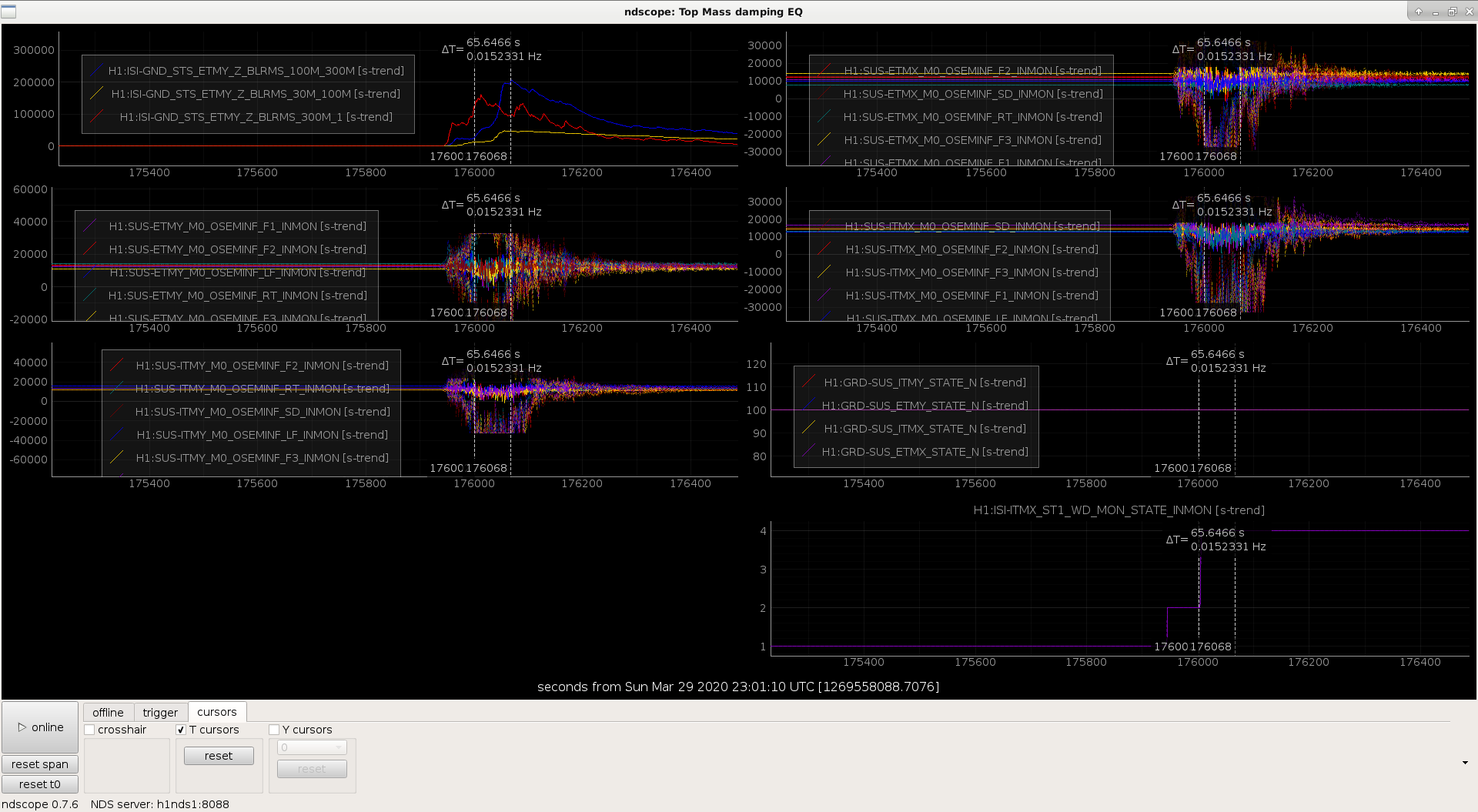
I'm not sure how much we can trust these blrms numbers, the ITMY STS was saturated for ~150 seconds during this earthquake. Attached trend shows the raw STS in counts, the signal is very clearly clipped at +/-32k counts. Not sure what this means for the blrms, but I think it's safe to say the sts couldn't be said to be accurately measuring the ground for this whole window.
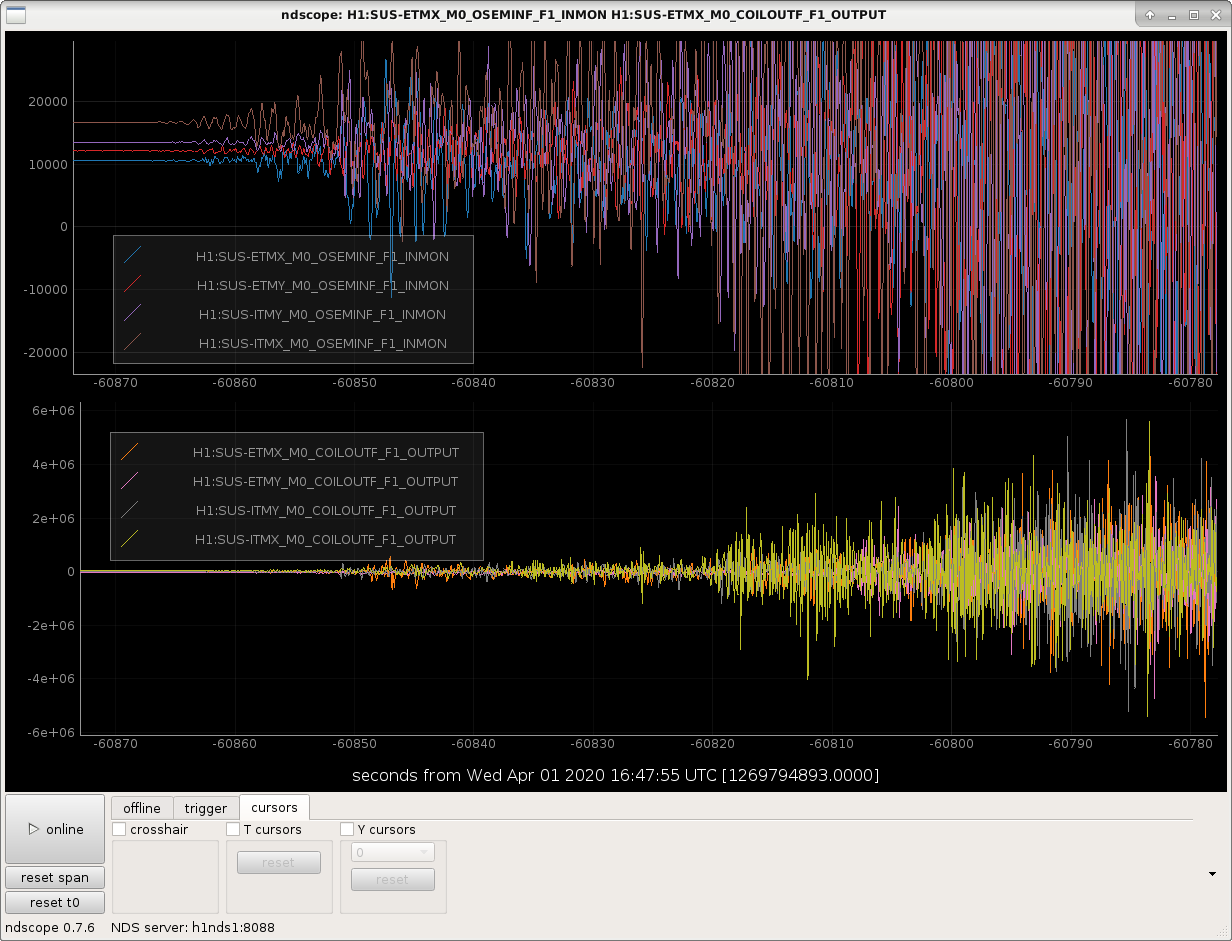
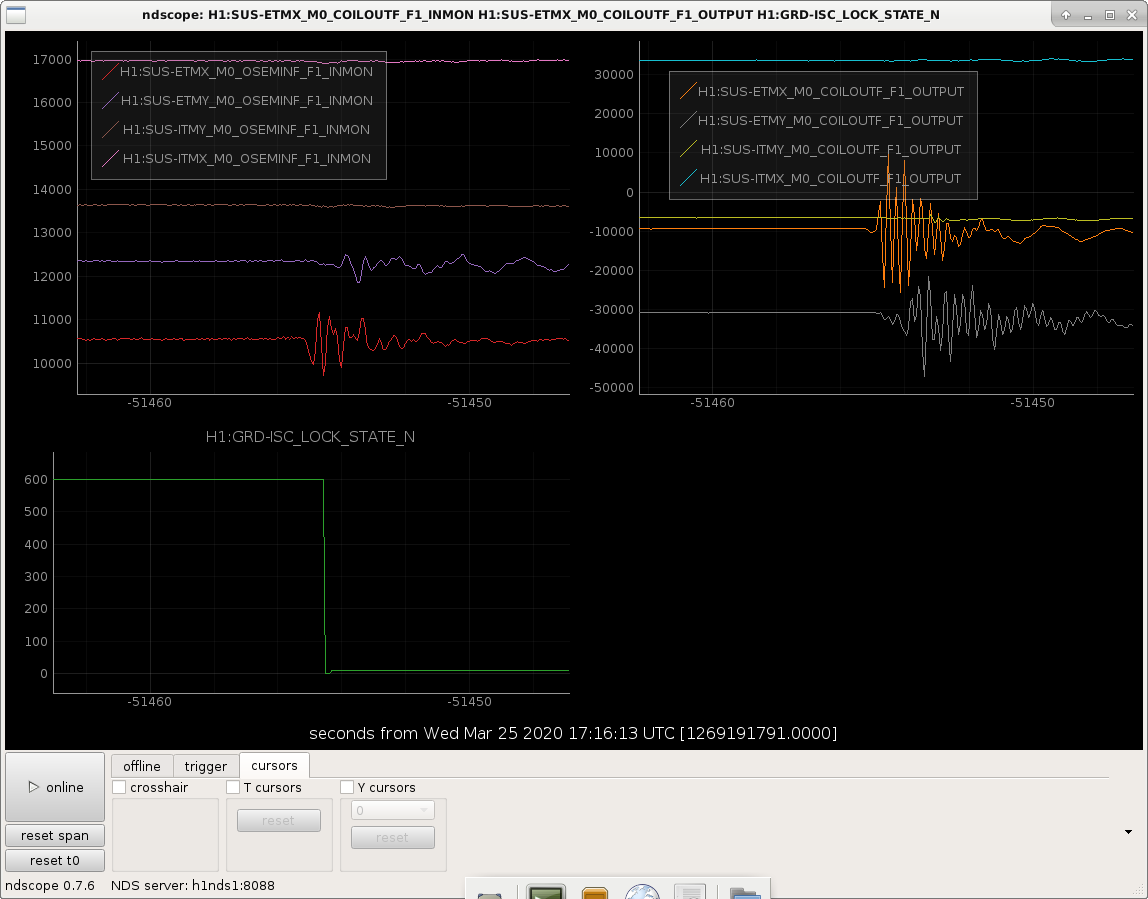
I have tried comparing the state of input osems and output coil drivers during a big earthquake vs IFO lockloss. Please attached the 2 ndscope plots. To keep things simple I am only showing the F1 osem/actuator (of all four QUADs) which controls the pitch motion. During an earthquake the osems saturated very quickly (within 60s) and the watchdog also tripped since the actuator value rose to greater than 60K (16 bit channel). In comparison when a regular IFO lockloss happens, the input osems fluctuates by +- 1000 in counts and the actuator by +-15k counts, which is way below saturation limits.