J. Kissel, Cheryl, Sheila, Jenne, Betsy, Jim, Keita, Rahul (all remotely)
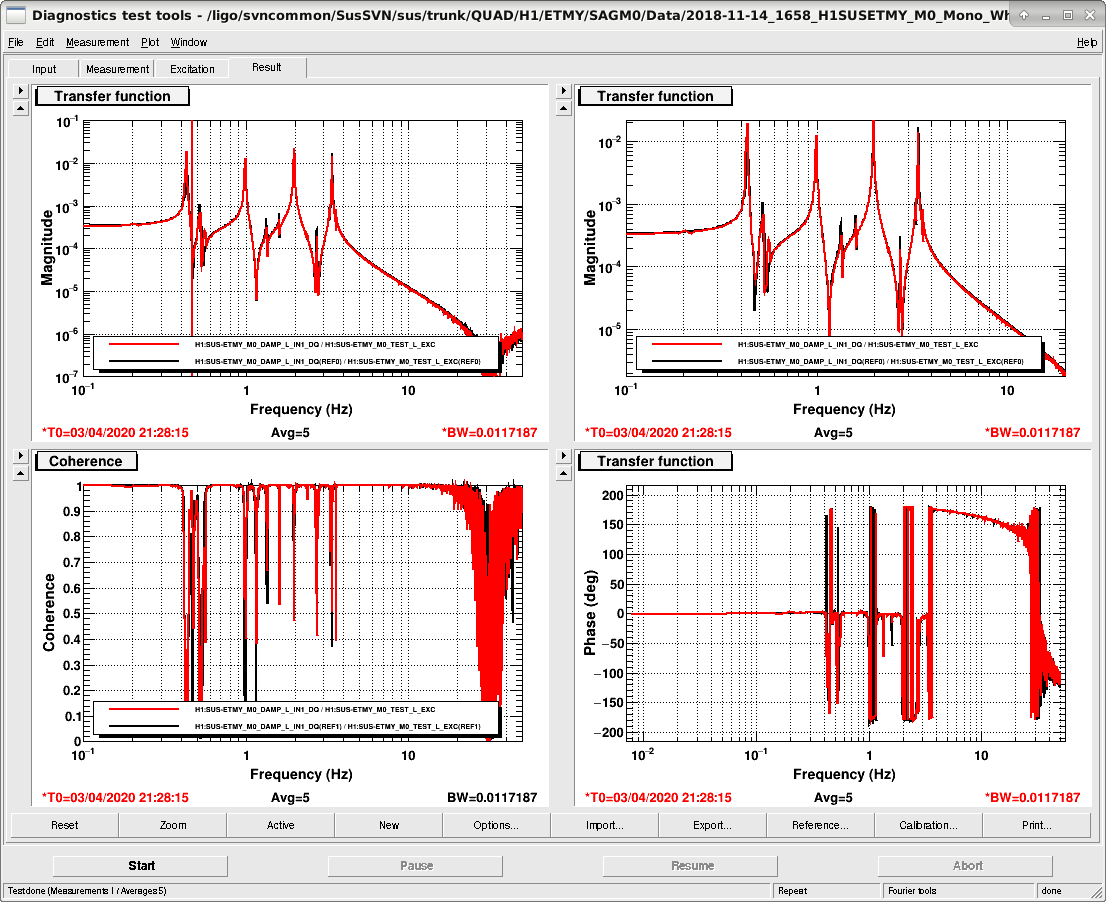
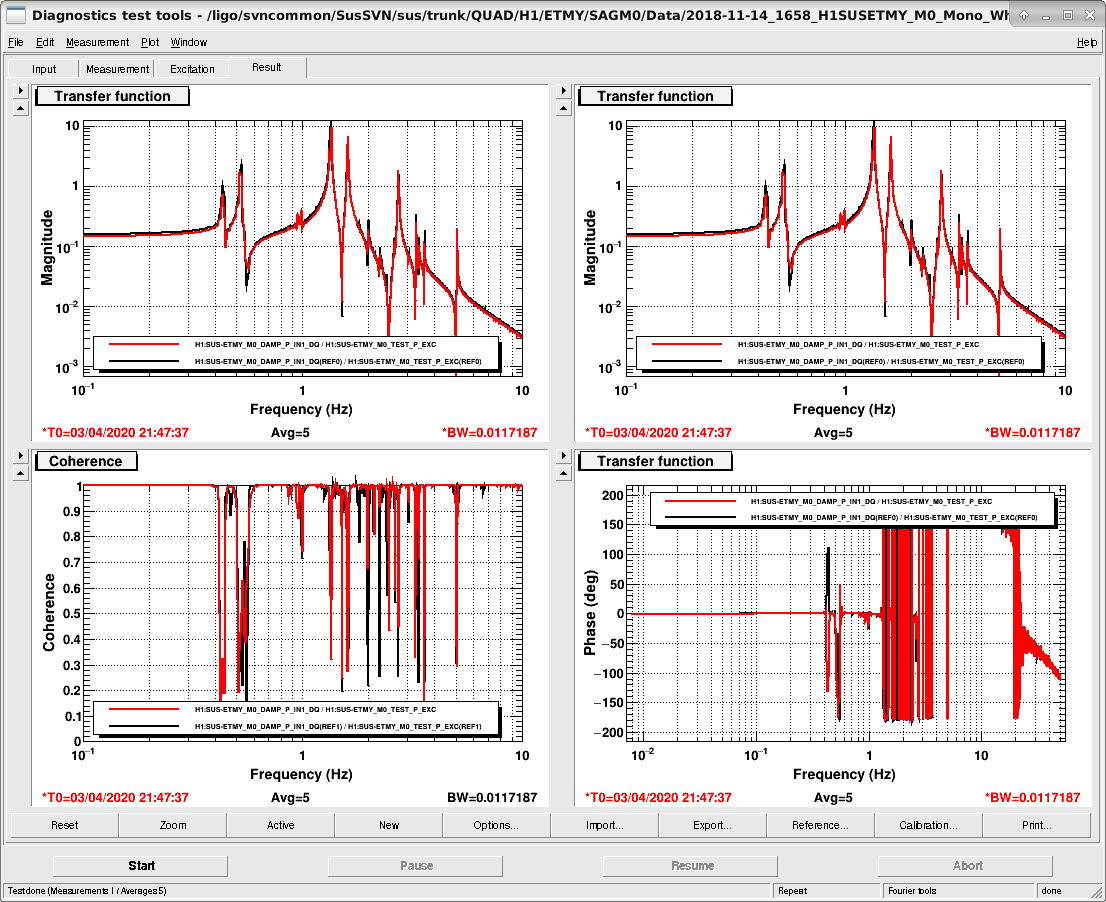
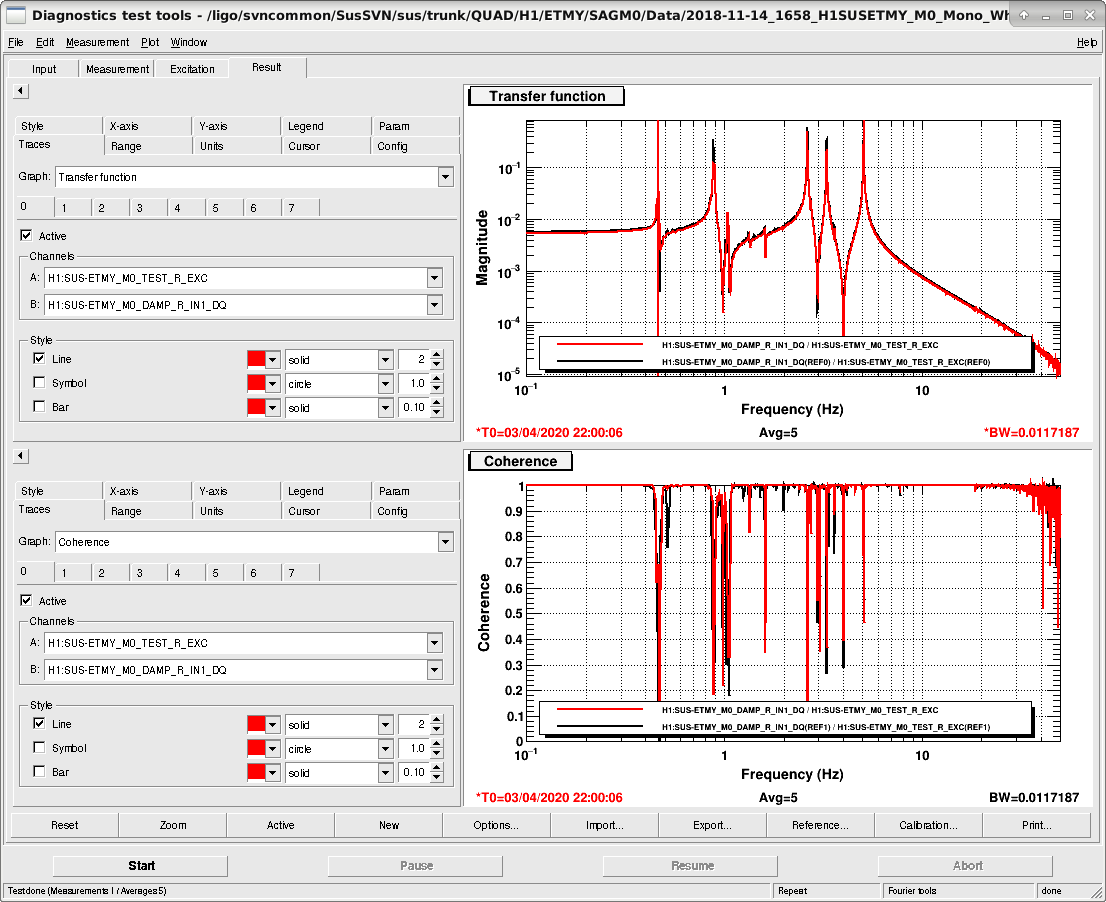
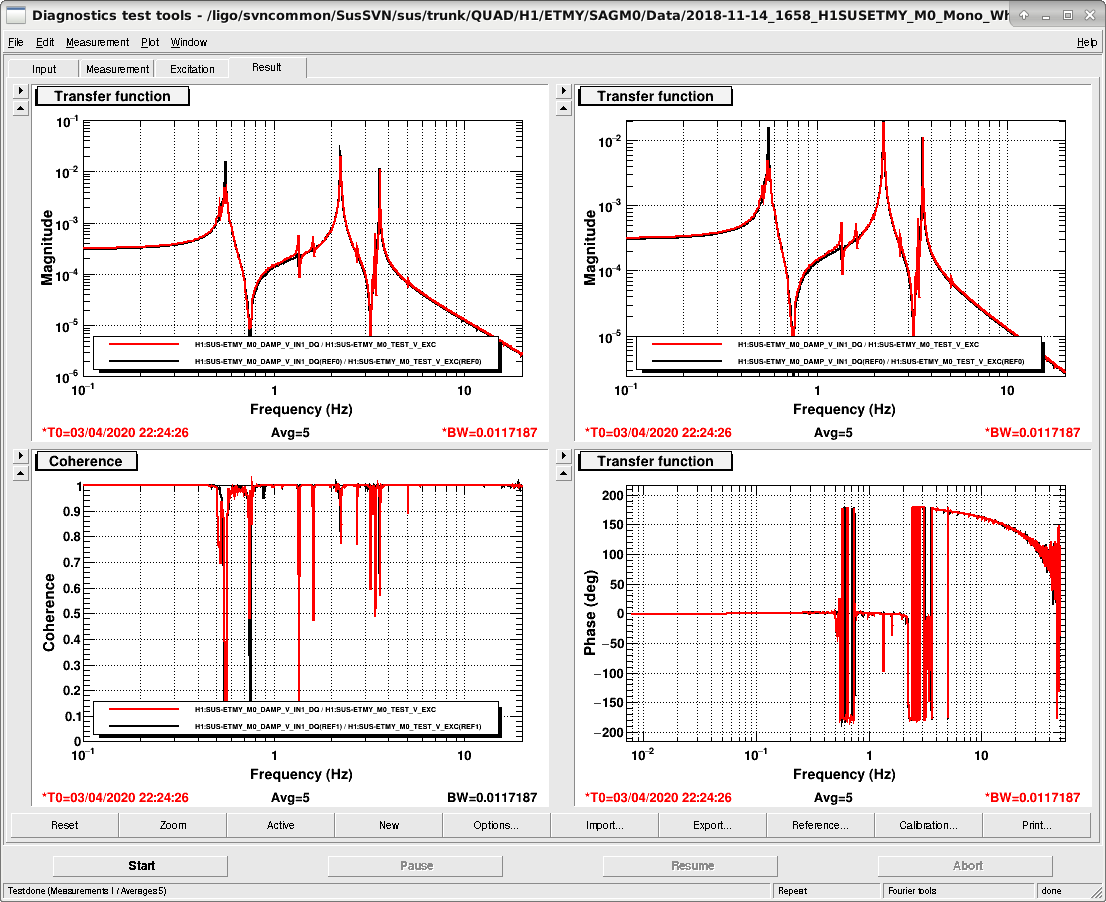
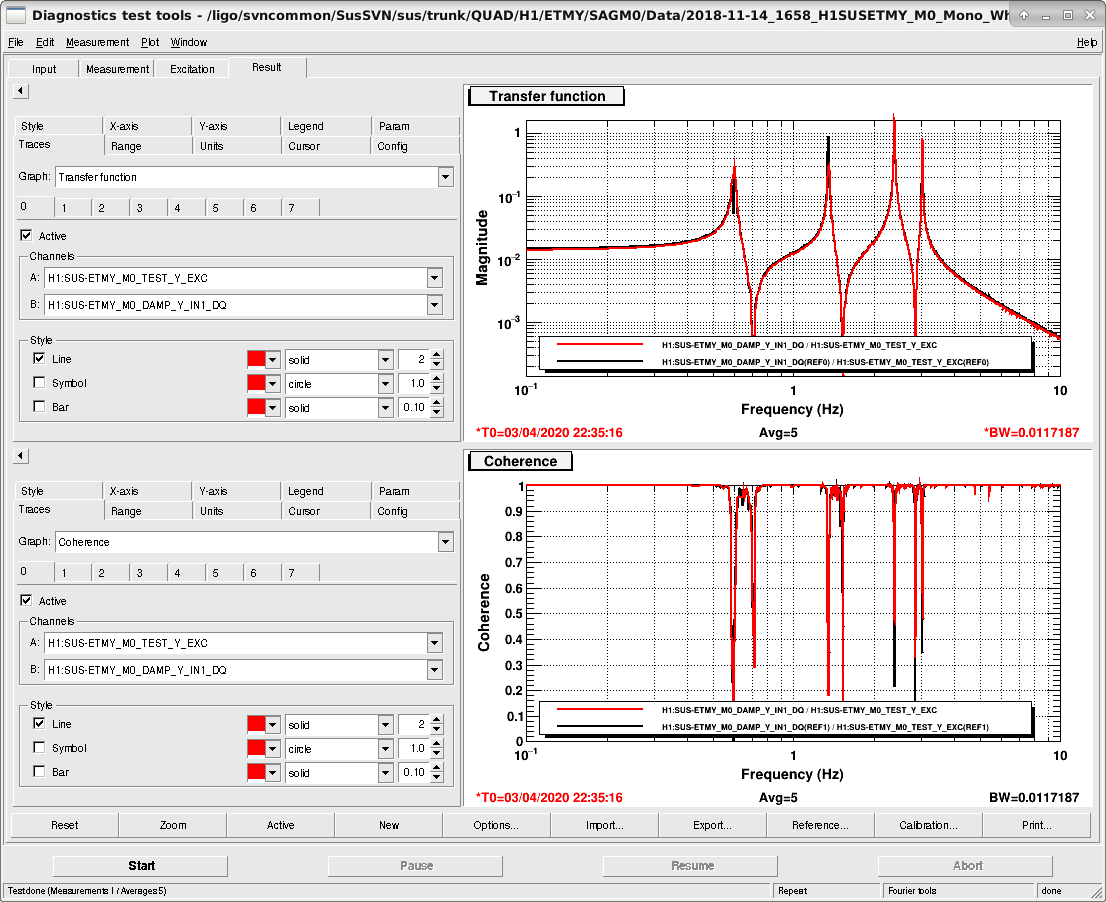
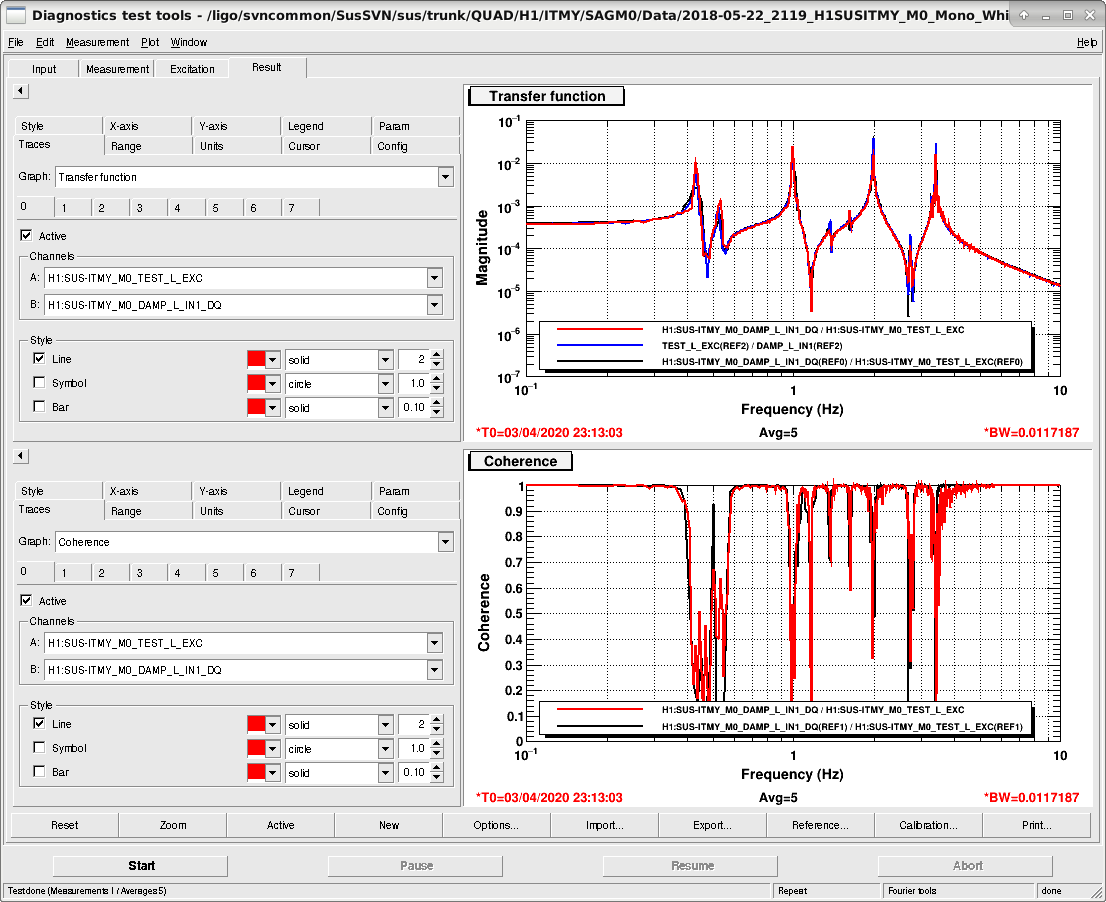
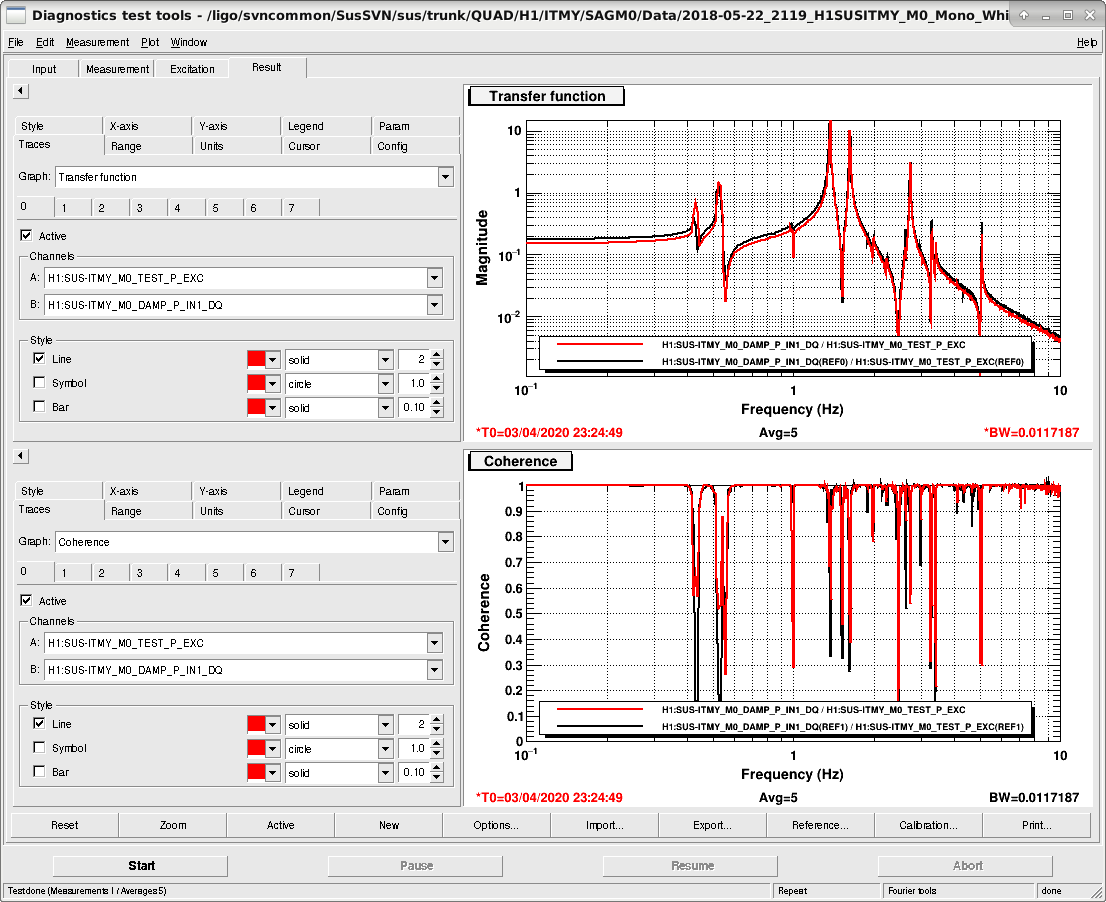
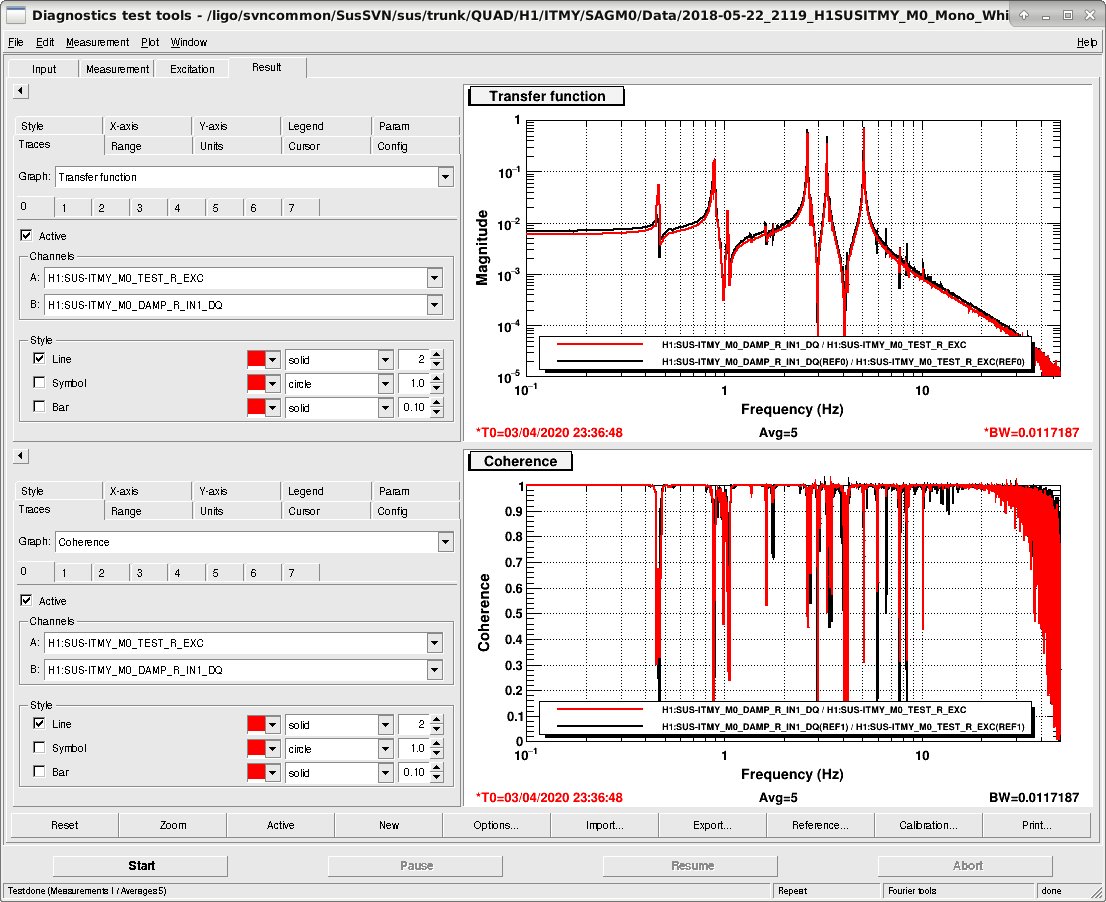
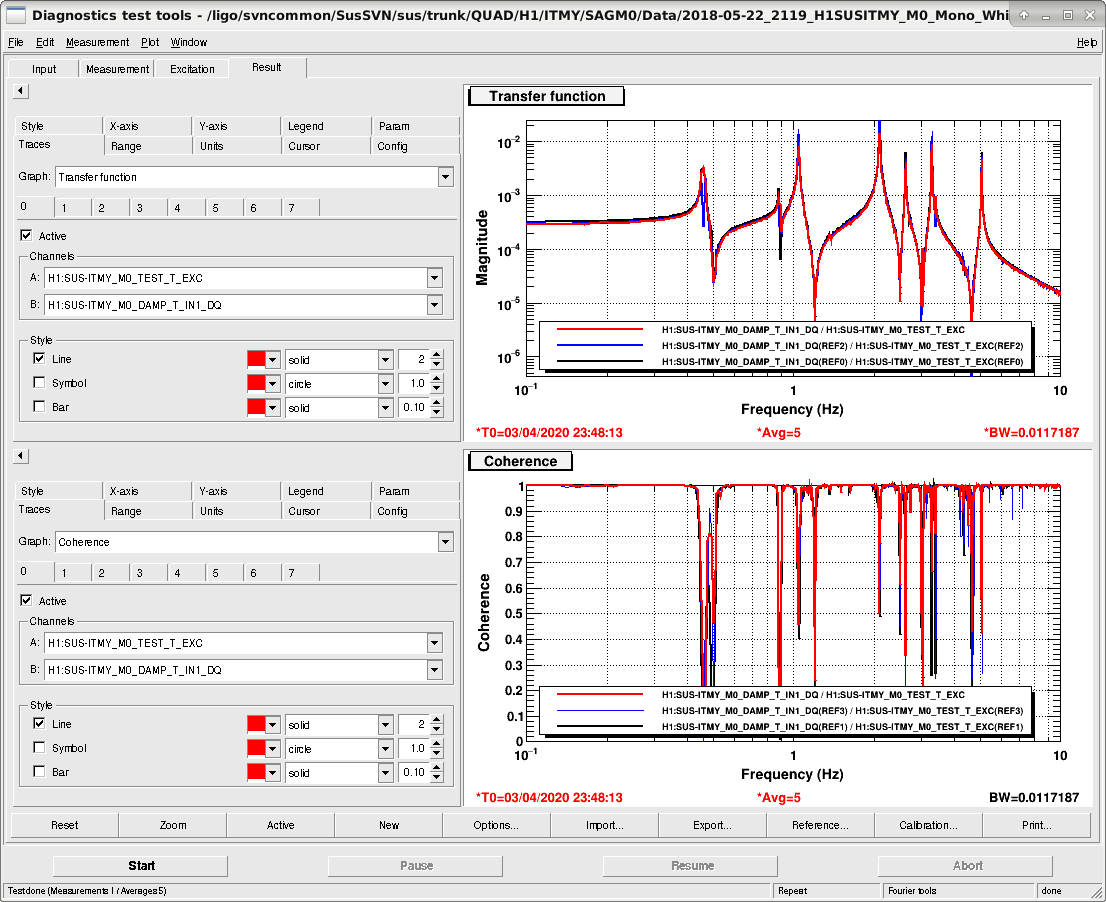
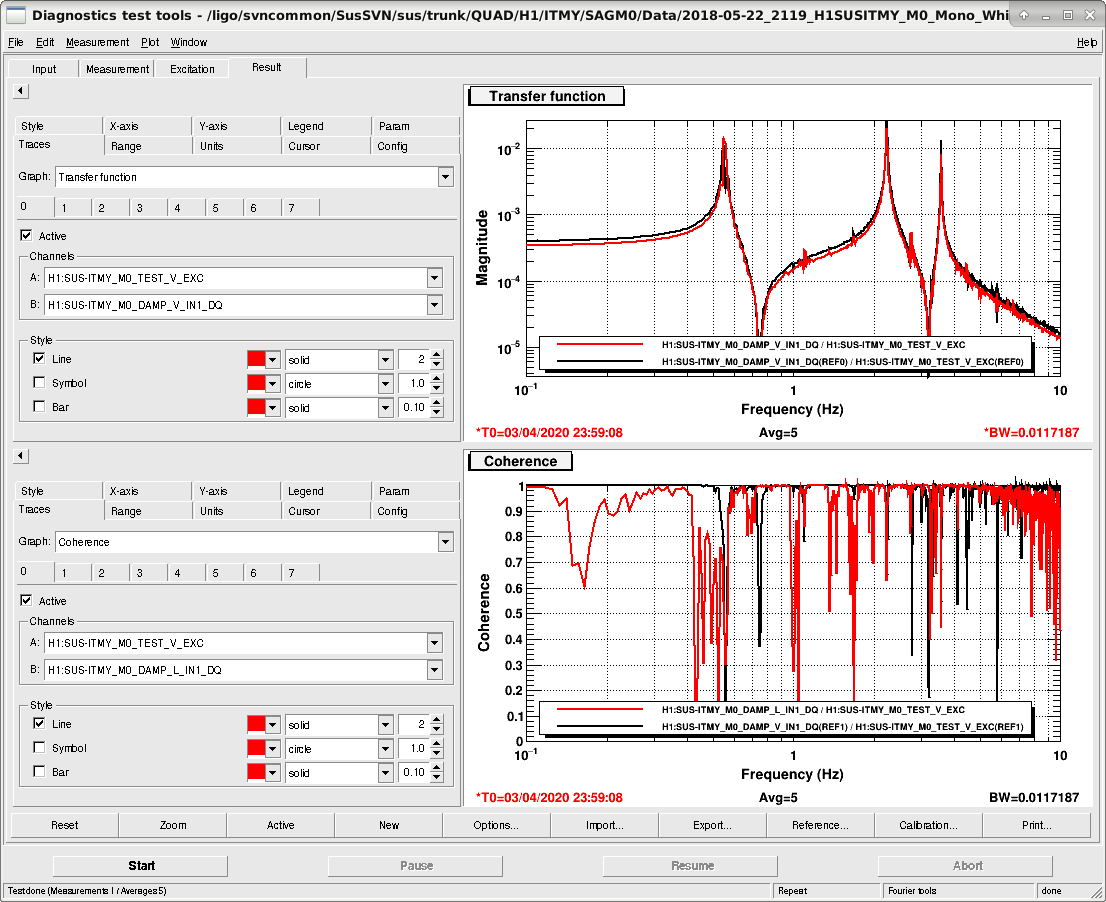
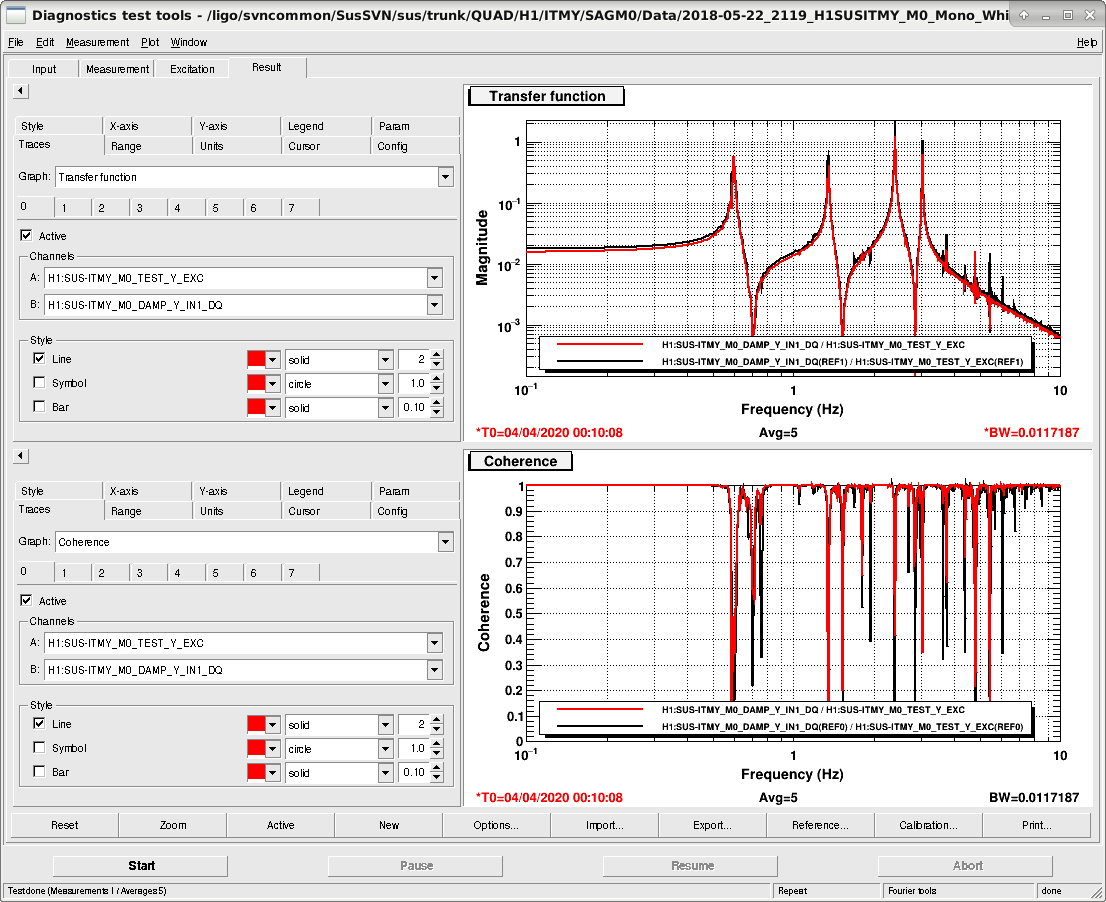
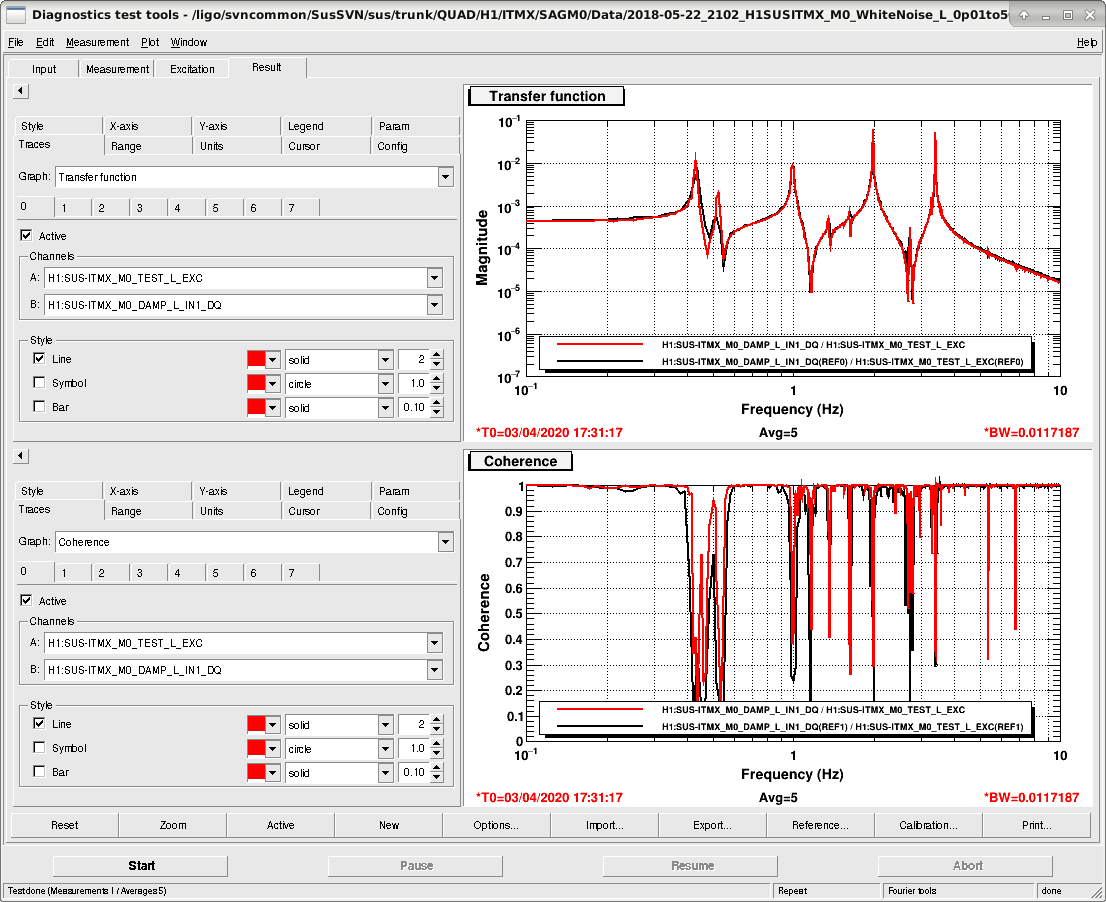
I have performed the transfer function measurements for ETMY (all six dof) and ITMY (all six dof) and ITMX (only Length). Please find the plots (thirteen of them) attached below. Cheryl was with me over TS helping me with ndscope and checking if the suspension is ringing up or not.
Based on these plots I can confirm that ETMY, ITMY and ITMX (even though we have only L measurements) looks free of any rubbing and is healthy. Today’s measurements were compared to the one performed in 2018, and all dof matches up well (in terms of magnitude and coherence values). I would also like to add that while performing these TF measurements, we reduced the excitation amplitude by ¼ (from the 2018 template), since the original values were ringing-up (by looking at the inmon channels of the osems at the M0 stage, while running tf excitations) the sus chain everytime.
J. Kissel also suggested that we switch on damping output filters for the M0 stage between 2 measurements – which we followed all the time.
I would also like to add our experience while performing ITMX transfer function in the morning. Cheryl and I started with the Length measurements. After the measurements got complete, 5 minutes later we found that the sus and ISI got tripped. Jenne joined us remotely and along with Cheryl started damping the M0 stage. Initially, Cheryl applied a very small gain (-0.001), however on increasing it the damping got worse.
Then Jim (on Betsy’s request) noticed that we have tripped the stage 2 of the ISI – which explains why the damping got worse when Cheryl engaged it. He then restored the ISI to fully isolated (ISOLATED_DAMP) state, which includes damping.
Next, J. Kissel joined us on the TS channel and took over the damping work from Cheryl. His strategy was to engage only 1 osem at a time with a larger gain (0.5ish). He also engaged osems according to the differential mode or common mode for more effective damping. This worked and finally we were able to damp the suspension.
While on parallel J. Kissel also found out that running the TF with ISI ON is a safer way to prevent tripping. We followed his advice while doing our measurements on ETMY and ITMY.
I have saved all the data sets at the following locations,
/ligo/svncommon/SusSVN/sus/trunk/QUAD/H1/ETMY/SAGM0/Data/
2020-04-03_2200_H1SUSETMY_M0_Mono_WhiteNoise_L_0p01to50Hz.xml
2020-04-03_2200_H1SUSETMY_M0_Mono_WhiteNoise_T_0p01to50Hz.xml
2020-04-03_2200_H1SUSETMY_M0_Mono_WhiteNoise_V_0p01to50Hz.xml
2020-04-03_2200_H1SUSETMY_M0_Mono_WhiteNoise_R_0p01to50Hz.xml
2020-04-03_2200_H1SUSETMY_M0_Mono_WhiteNoise_P_0p01to50Hz.xml
2020-04-03_2200_H1SUSETMY_M0_Mono_WhiteNoise_Y_0p01to50Hz.xml
/ligo/svncommon/SusSVN/sus/trunk/QUAD/H1/ITMY/SAGM0/Data/
2020-04-03_2230_H1SUSETMY_M0_Mono_WhiteNoise_L_0p01to50Hz.xml
2020-04-03_2230_H1SUSETMY_M0_Mono_WhiteNoise_T_0p01to50Hz.xml
2020-04-03_2230_H1SUSETMY_M0_Mono_WhiteNoise_V_0p01to50Hz.xml
2020-04-03_2230_H1SUSETMY_M0_Mono_WhiteNoise_R_0p01to50Hz.xml
2020-04-03_2230_H1SUSETMY_M0_Mono_WhiteNoise_P_0p01to50Hz.xml
2020-04-03_2230_H1SUSETMY_M0_Mono_WhiteNoise_Y_0p01to50Hz.xml
After the measurements were complete, I changed the coil output filter state back to 2.0 (from 1.0 for the test). Next I switched on the output filters for the M0_Damp and switched off the output filters for the M0_Test. I also reverted the gains for the M0_Test back to original values (these were changed for pitch and yaw only since other dof were at 1.0 as required). Finally the GUARDIAN state was set to ALIGNED (which was on DAMPED for tf).