jeffrey.kissel@LIGO.ORG - posted 14:42, Tuesday 17 August 2021 - last comment - 10:45, Wednesday 18 August 2021(59651)
SUSHAM56 Front-end Models for OMC, OMs 1-3, OFI Revamped and new ZMs 4-6 Created
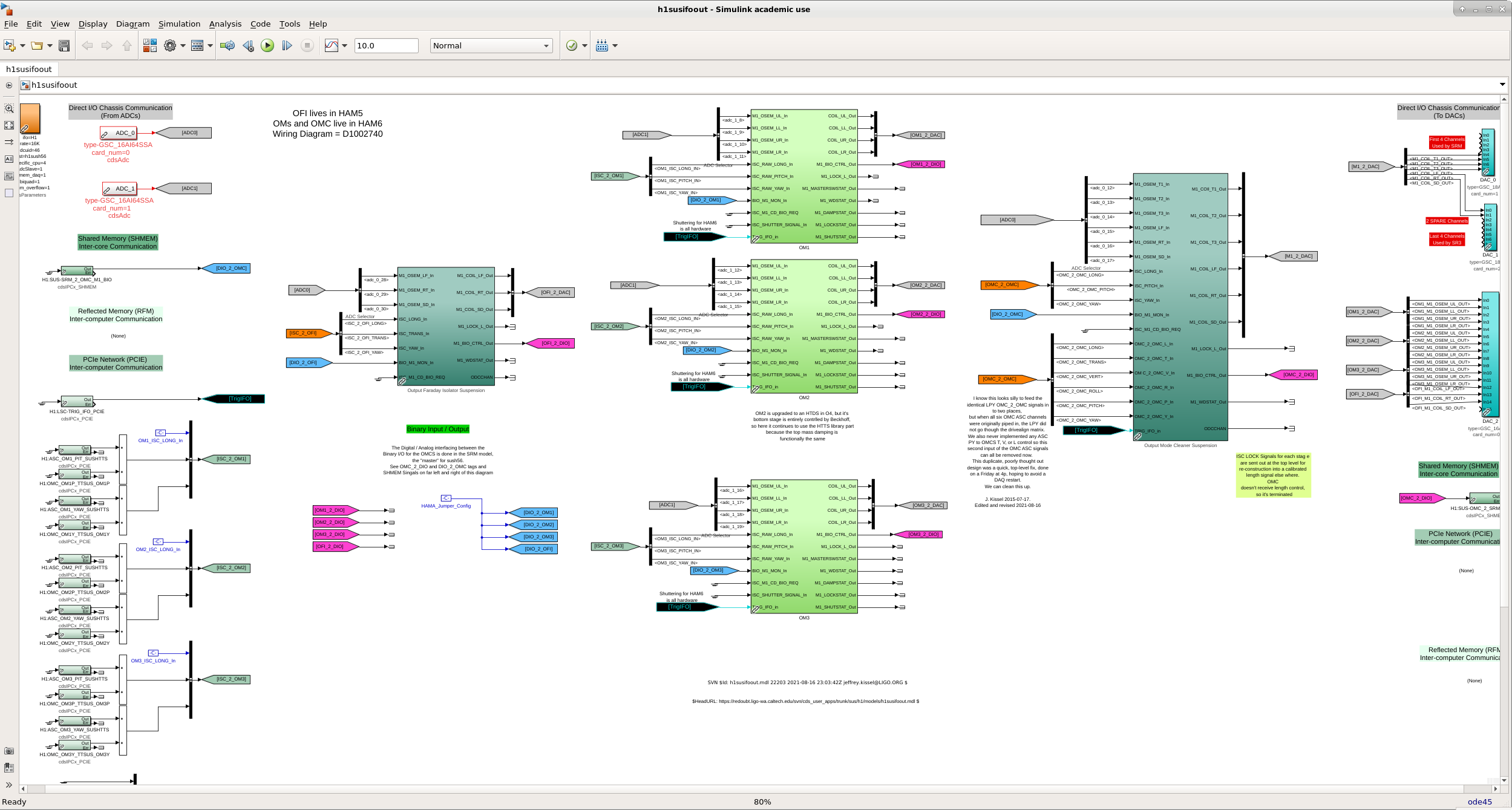
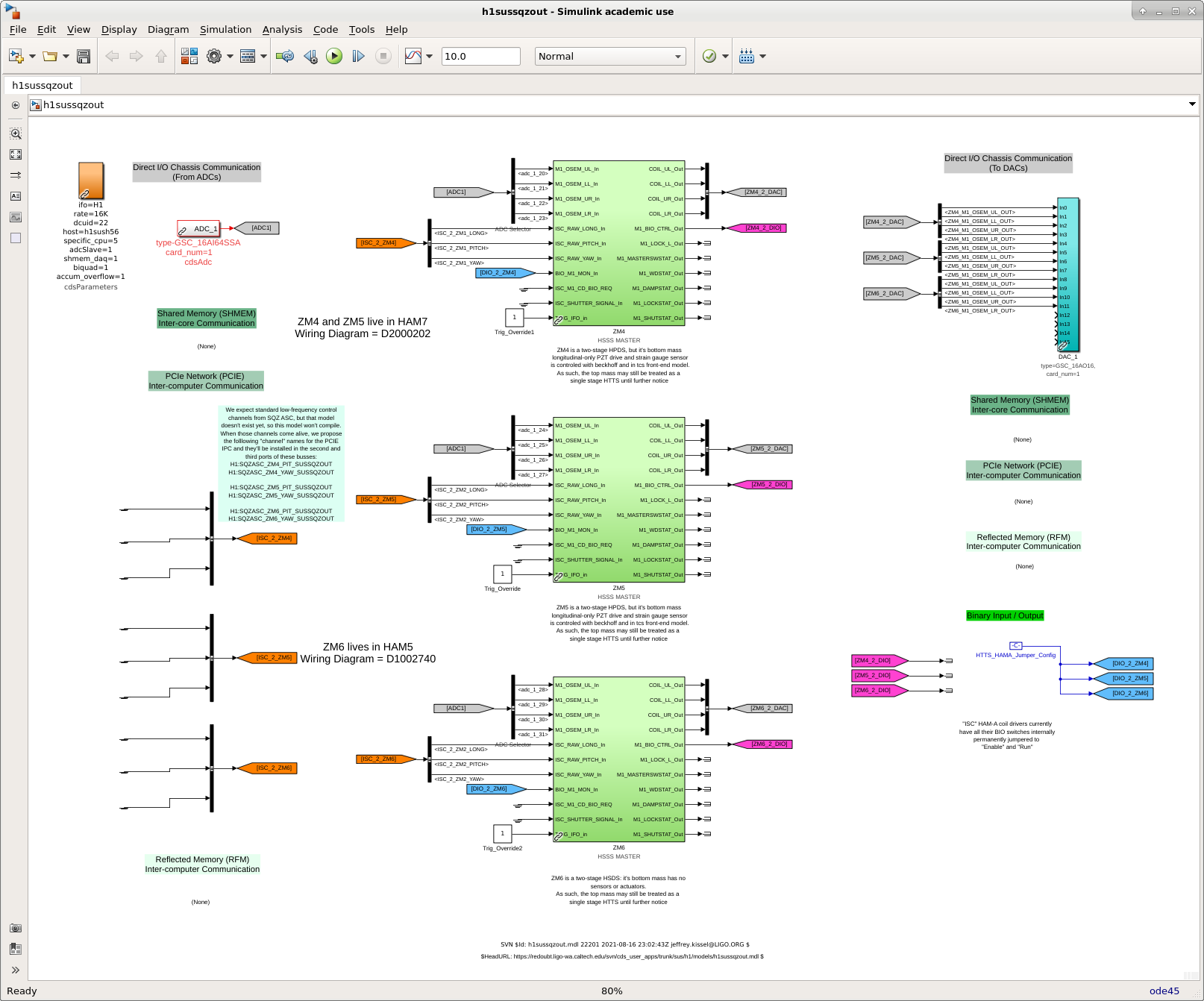
J. Kissel WP #9871 Design Discussion: G2101636 Wiring Diagram: D1002740 As a part of cost savings for A+ SUS, we need to up-cycle SUS electronics from O3. In concert, since the O3 HTTSs ZM1, ZM2 and OPOS OPO are to be moved in to the new HAM7 and read out by a new front-end computer and IO chassis (along with ZM1 and ZM2 getting upgraded from HTTS to HDDS and HPDS respectively) they now vacate space in their former host front end computer, h1sush56. The proposed allocation and re-juggling of up-cycled electronics and a a way to integrate them with A+ was discussed in G2101636. Having agreement from many folks, we then upgraded the SUSH%^ wiring diagram D1002740 accordingly, while Daniel and Fil simultaneously began implementing the changes (see, for example, LHO aLOGs 59563 and 59632). Of significant importance within the plan -- there are little-to-no changes to the SUSH56 IO chassis, and little-to-no movement of electronics chassis -- "just" new suspension assignments and recabling ("just" in quotes, because Daniel, Brandon, and Fil have been doing an intense amount work to meet this design). No new DAC cards, no new ADC cards, no new BIO cards in the IO chassis, just re-use of existing infrastructure, and a new digital mapping. Next Step, covered in this aLOG: build the front-end simulink models / digital mapping to match the proposed design. First, much like we did before O3 (see 38827), we re-arrange the model names and DCUID assignments based on the content of the SUS controlled within them: Computer, Model, DCUID, Optics Computer, Model, DCUID, Optics O3-era | O4-era h1sush56 | h1sush56 h1sussr3, 44 SR3 ctrl | h1sussr3, 44 SR3 ctrl h1sussrm, 45 SRM ctrl | h1sussrm, 45 SRM ctrl h1susomc, 46 OMC, OM1-3 ctrl | h1susifoout, 46 OMC, OM1-3, OFI ctrl h1susopo, 22 OPO, ZM1-2, OFI ctrl | h1sussqzout, 22 ZM4-6 ctrl h1susauxh56 | h1susauxh56 h1susauxh56, 110 SR3, SRM, OMC, | h1susauxh56 SR3, SRM, OMC, OM1-3, ZM1-2, OFI, | OM1-3, OFI, OPO | ZM4-6 coil monitors | coil monitors So, in words -- the OFI gets moved and lumped in to a new model called h1susifoout, and the ZM steering mirrors that bring the new filter cavity's output from FC1 to the OFI, ZM4, ZM5, and ZM6 get lumped into another new model called sussqzout, but, again importantly, they don't take up any new space, or use/need any new DAC cards or ADC cards. Second, also as a part of this upgrade, we get introduced to a brand new class of suspensions -- the HXDS, for HAM (xx) Double Suspensions, which all have virtually identical designs of a two stage suspension where (xx) designates their only difference -- the actuator on the bottom stage. You may hear folks (or see early design documentation) also refer to this suspension class as just "HDS." As with most other suspensions, the upper suspended mass / stage is referred to as "TOP" or "M1," and the lower stage is "BOTTOM" (BOT for short), or "M2." This information is elsewhere (A+ conceptual layout, D1800027, the mechanical drawings main page E1900354, controls design descriptions T2100056), but it's always helpful to see new acronyms in new places to catch a different audience: HXDS global alignment control types with no wavefront control: HSDS = HDS + no actuators on M2, aka Simple HDDS = HDS + Dither: where a ~2 kHz alignment Dither signal is generated with 4 COSOM coil M2 actuators, controlling L, P, Y HXDS-SAMS (Suspended Active Matching Stage) types with optic radius of curvature controls for active correction of the reflected optical wavefront: HPDS = HDS + Piezo-SAMS: 1 single, piston style M2 piezo actuator, controlling L (i.e. deforming the mirror to create a radius of curvature change) HTDS = HDS + Thermal-SAMS: 1 single ring heater style M2 thermal actuator, controlling a ring heater on M2 (i.e. deforming the mirror to create a radius of curvature change) HRDS = HDS + DITHER + Piezo-SAMS: 1 piezo and 4 COSEM coil actuators on M2 Of particular note for our front-end model design, all HXDSs have four BOSEMs arranged in the LIGO standard for controlling only Longitudinal, Pitch, and Yaw (L, P, Y, respectively) in the Upper Left, Lower Left, Upper Right, and Lower Right (UL, LL, UR, LR) corners of the TOP mass, or M1 mass. That means the digital map of the *control* system for the M1 stage is *identical* to that of an HTTS, like the OMs or the O3-era ZM1 and ZM2. For the bottom, M2 stage, we either - don't need any controls (in the HSDSs), - their controlled and sensed entirely with "slow" beckhoff ADCs and DACs (in HPDSs or HTDSs), - actually need fast controls for the ~2 kHz dithering (in HDDSs). For O4, the assignments of suspension types to suspensions are: ZM1 and ZM3 = HDDS ZM2, ZM4, and ZM5 = HPDS ZM6 = HSDS All this being said catches you up to speed enough to look at the attached screenshots of the top-level front-end simulink models. One can see in 2021-08-17_h1susifoout_toplevel_compiles.png that we have - the OFI block (using the same library part as before, OFIS_MASTER), - the OMC block (using the same library part as before, OMCS_MASTER), - the OMs 1-3 blocks (using the same library part as before, HSSS_MASTER ) with all the same top level connections to ADCs, DACs, BIO cards, Dolphin Network PCIE Inter Process Communication Computer-to-Computer IPC. Other things of note: - As I continue my slow and steady battle against excessive watchdogging (see IIET Ticket 9392), I've removed the IPC sender connection from the OMC M1 watchdog to the ISI HAM6. This will require a model change to the top level of the HAM6 ISI as well. - Any and all remnants of the old (online detector characterization) system, which has now been replaced the guardian and the SDF system have been grounded, not to be used (i.e. all the WDSTAT, DAMPSTAT, LOCKSTAT, SHUTSTAT outputs from each block) (continuing to finish out IIET Ticket 12045). - The longitudinal output of the global control M1 LOCK filter bank -- which can be used to create a estimate of the displacement of the stage while under control -- also remains grounded and unused since (a) The control for these suspensions is often only < 0.5 Hz UGF drift control, leaving the band of interest (typically < 5 Hz) free of control, so one can just use the OSEMs (b) No one ever has enough time, or cares enough, to make a properly calibrated full displacement estimate of these non-cavity suspensions, because their noise is typically much below to the IFO's sensitivity. In 2021-08-17_h1sussqzout_toplevel_compiles.png brings in the new suspensions ZM4 and ZM5 (an HPDS), and ZM4 (an HSDS). However, you'll notice that - all three suspensions are using an HSSS_MASTER block for their control. This serves as a "path of least resistance" work around, because -- as discussed above -- either the HPDS M2 stages of ZM4 and ZM5 control is done entirely in beckhoff, or the HSDS M2 stage of ZM6 has nothing to control. Neat! - The ZMs, like the OMs and the OFI all are driven by HAM-A drivers that have their run/acquire switchable filtering jumpered to have the low-pass filter always on, so there's no BIO control. - Because we don't have a functional squeezer ASC model up and running yet, all of the *actual*, expected Dolphin Network IPC blocks have been replaced with grounded inputs. I've left my suggestions for channel names as a note. - Similar to h1susifoout, I've grounded all *STAT* outputs from each block. - Similar to h1susifoout, I've grounded the M1_LOCK_L output. Common to both models -- in support of the way things are in RCG 4.01, against which these models have been compiled, I've changed the variable name "site" to "ifo" in the orange CDS parameter block. These models are ready for install!
Images attached to this report
Comments related to this report
The the svn file properties of these models which update text stamps that indicate the (location/date-time of/person who made) in these new models models have been set with "the usual" commands (that I haven't used since 2014, so I repeat here for convenience):
$ cd /opt/opt/rtcds/userapps/release/sus/h1/models/
$ svn propset svn:keywords 'Id' h1susifoout.mdl
$ svn commit -m "Set Id property." h1susifoout.mdl
$ svn propset svn:keywords 'HeadURL' h1susifoout.mdl
$ svn commit -m "Set HeadURL property." h1susifoout.mdl
and was repeated repeat for h1sussqzout.mdl.
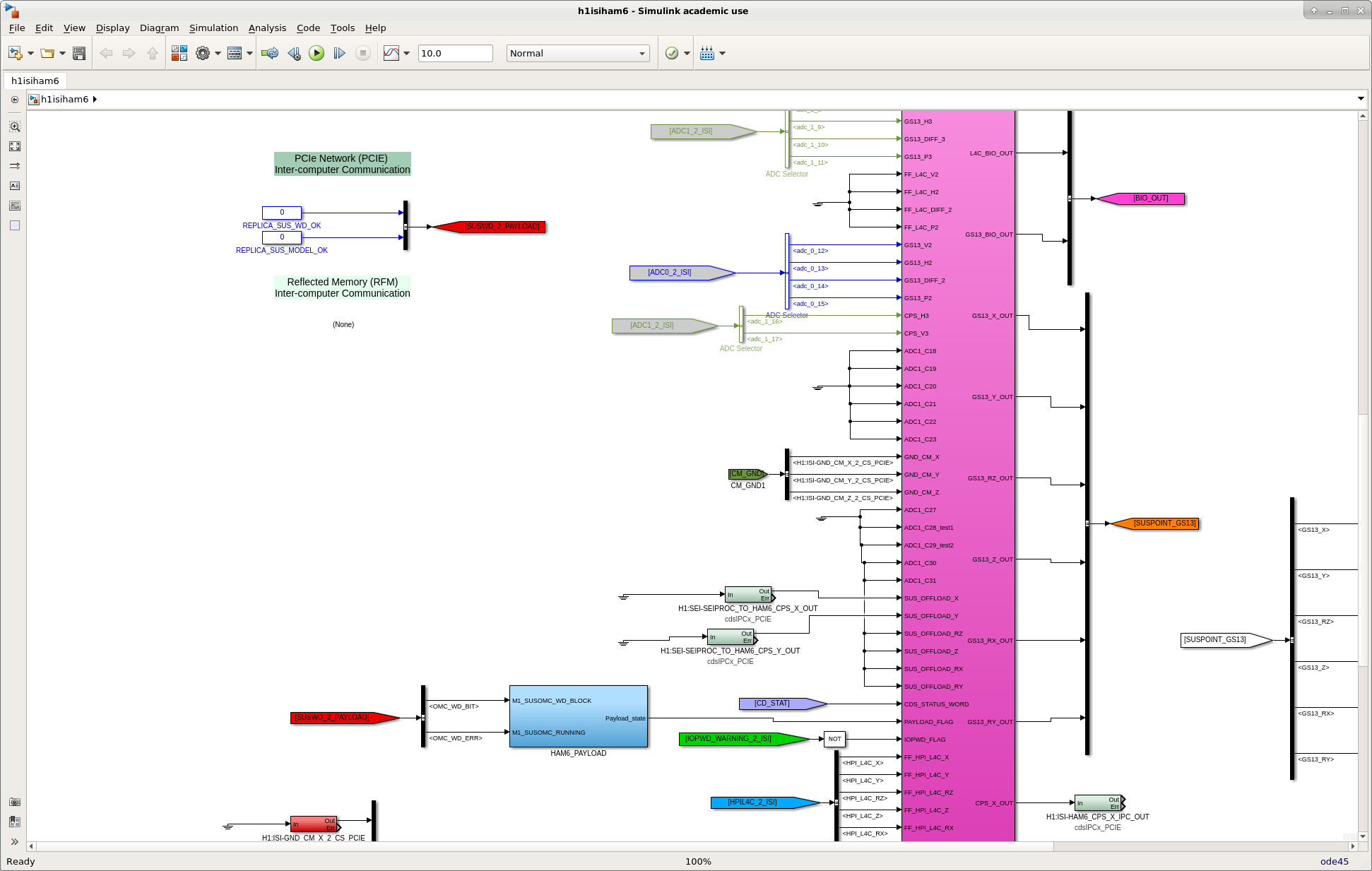
In order to support the above removal of the OMC's connection to the HAM6 ISI's PAYLOAD watchdog, I've edited the h1isiham6 front-end model as well.
Again following the path of least resistance, rather than ripping out the whole payload trigger generator structure, I've:
- Removed the IPC block that connects into the SUSWD_2_PAYLOAD tag
- Added in two replica constants, both of value = 0, to mimic an IPC that's sending a happy "OMC SUS WD OK" signal (aka = 0), and reporting now errors (aka = 0).
Also in support of compiling against RCG 4.01, I've changed the "site" variable to "ifo" under the orange CDS parameter block.
Images attached to this comment