Jeff Kissel, Brad Ratto
As a follow up to a comment made by Rahul in LHO:61255, to alleviate issues with beam clipping "Jeff Kissel suggested to adjust the damping gains (a short term fix until the HXDS dynamical model are properly studied and then new damping loop design are implemented)." That time is now, we are going to develop said "new damping control loops".
We started out by taking measurements of the existing M1 ZM6 damping loops in order to (1) asses its efficacy and (2) later use it to aid in the modeling process of a new damping control loop.
The measurements are found here: /ligo/svncommon/SusSVN/sus/trunk/HXDS/H1/ZM6/SAGM1/Data/
2022-04-12_1739_H1SUSZM6_M1_WhiteNoise_L_0p01to100Hz_OpenLoopGainTF.xml
2022-04-12_1739_H1SUSZM6_M1_WhiteNoise_P_0p01to100Hz_OpenLoopGainTF.xml
2022-04-12_1739_H1SUSZM6_M1_WhiteNoise_Y_0p01to100Hz_OpenLoopGainTF.xml
Now... to make the case as to why we should even bother...
For the Longitudinal DOF:
The right hand side top plot of (1) indicates that the location of the lower and upper unity gain crossing, denoted by the blue vertical lines, results in *enough* phase margin (LUGC/UUGC Phase Margin: -107/45 DEG) to where the damping loop can be considered stable, and as shown by (2), the gain peaking of the system is approximately ~1.5.
(1) H1_SUS_ZM6_M1_Damp_L_OpenLoopGain.jpg
...is a quad plot where, on the left hand side, the top plot is the magnitude of the open loop gain transfer function (OLGTF), and the bottom plot is the coherence between signals***, on the right hand side, the top and bottom plots are the magnitude and phase, respectively, of the OLGTF.
*** The signals in the legend denoted by... the red trace are used for the OLGTF, the blue trace are used for the closed loop gain transfer function, the green trace are used to find the loop suppression.
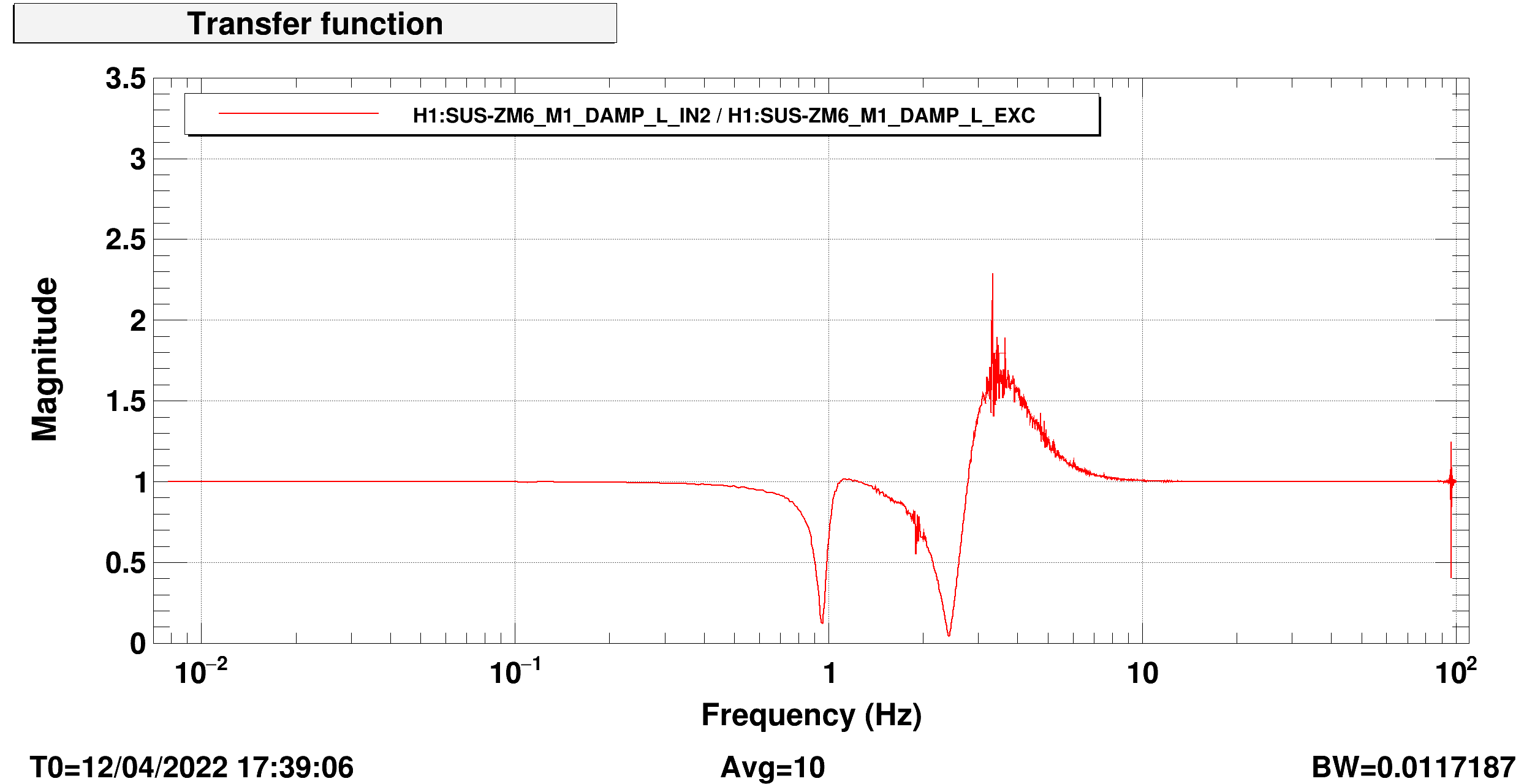
(2) H1_SUS_ZM6_M1_Damp_L_LoopSuppression.jpg
...is a magnitude plot of loop suppression gain as a result of the damping loop.
For the Pitch DOF:
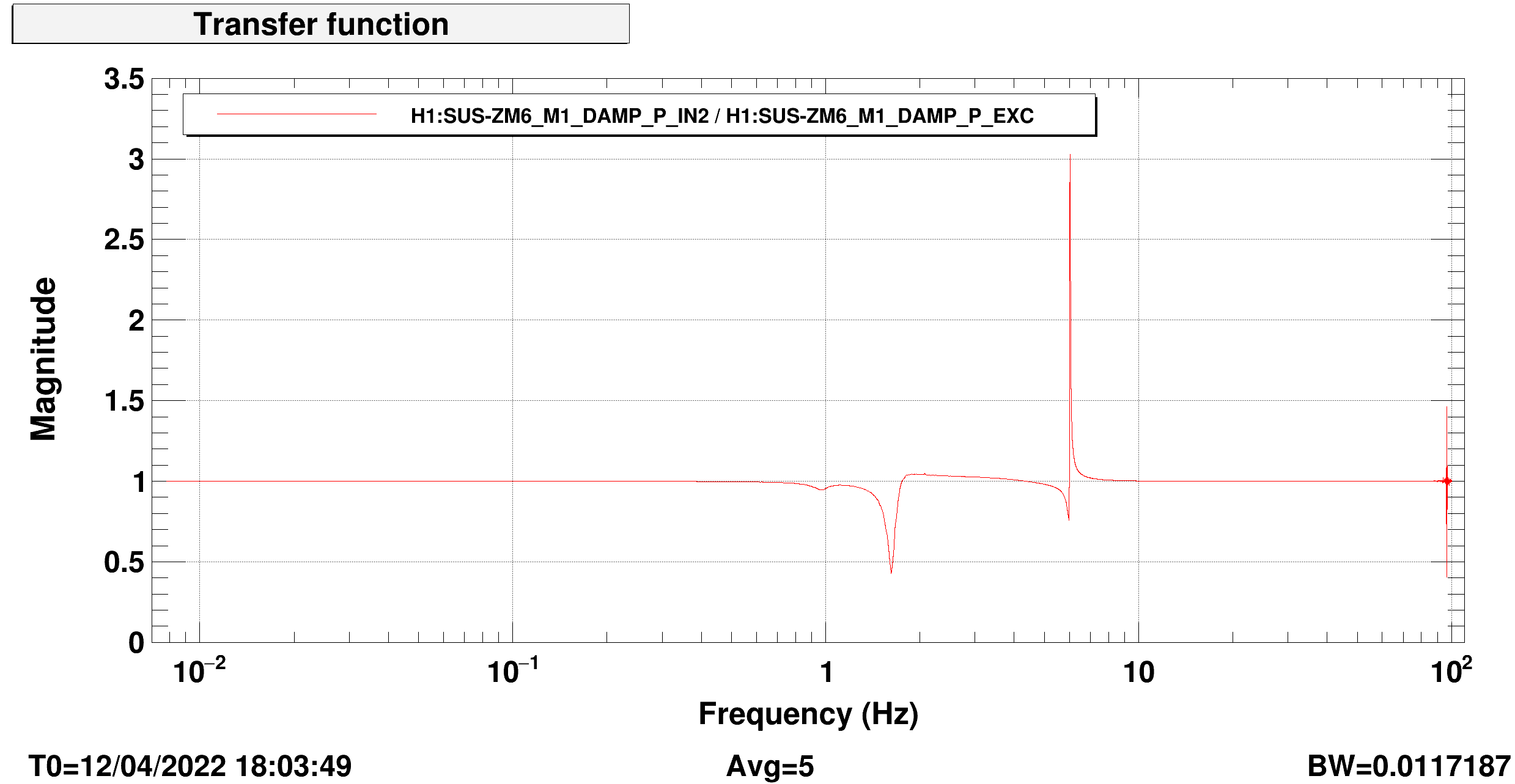
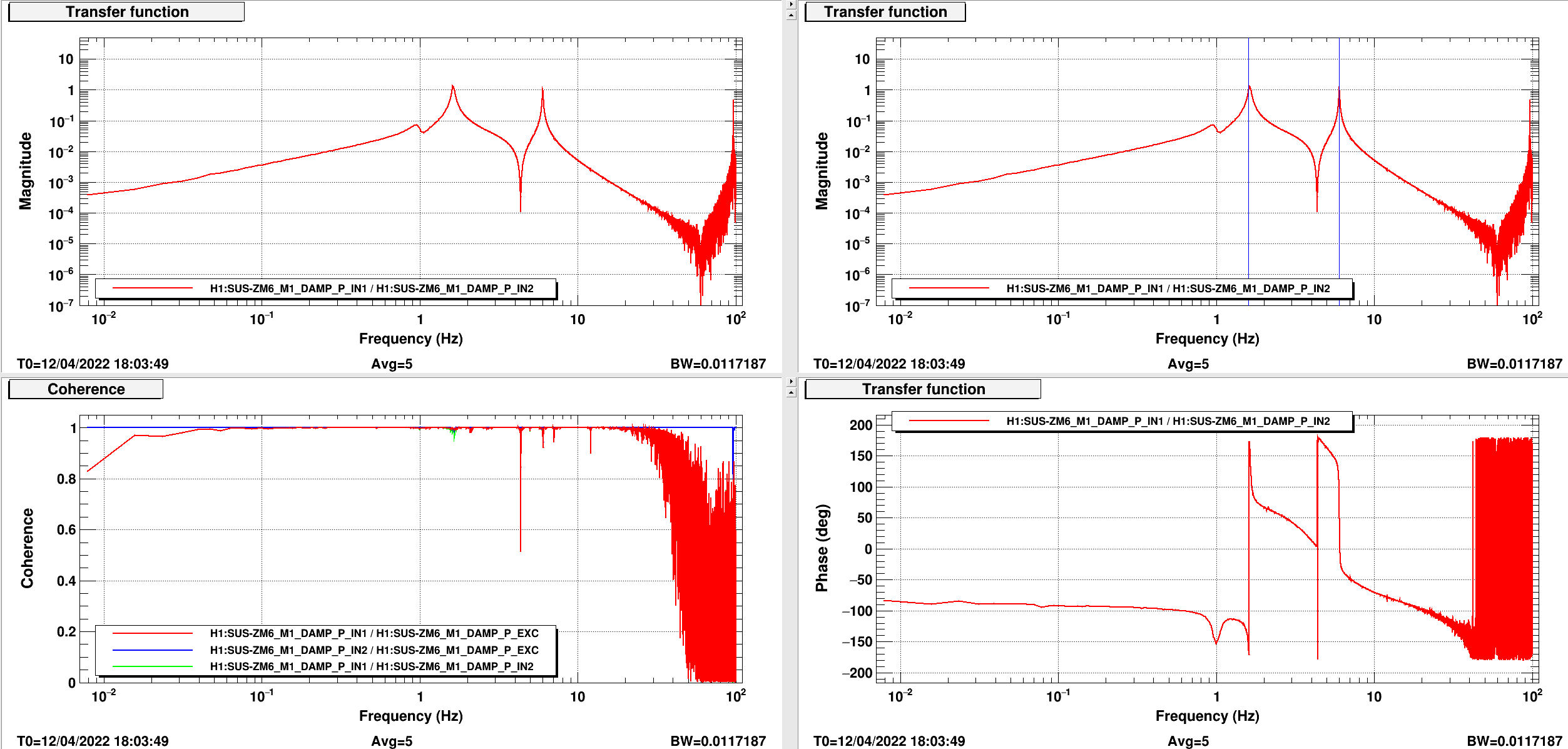
In (3) the lower and upper unity gain crossing, denoted by the blue vertical lines, are close to or on resonance peaks, which aligns with a steep phase feature seen directly below, meaning that the system may or may not be unstable depending on what the phase is at the unity gain crossover frequency. So we turn to (4) where we see gain peaking of ~3.0, in reality we suspect that this value should be much larger because of what we see in (3) and supported in part by the narrow Q-like nature of the peak. But, it could be that the system IS stable...but marginally, which is *just* as bad. It could also be that the frequency resolution used to take the measurement was not high enough in order to capture the *true* value of the gain peak.
As a side note, due to the cross coupling between the longitudinal and pitch degrees of freedom, a small longitudinal resonance peak is visible at around 900mHz. In terms of takeaways, design the longitudinal damping loop in order to mitigate the cross coupling effect.
(3) H1_SUS_ZM6_M1_Damp_P_OpenLoopGain.jpg
...same story as (1) but for Pitch.
(4) H1_SUS_ZM6_M1_Damp_P_LoopSuppression.jpg
...same story as (2) but for Pitch.
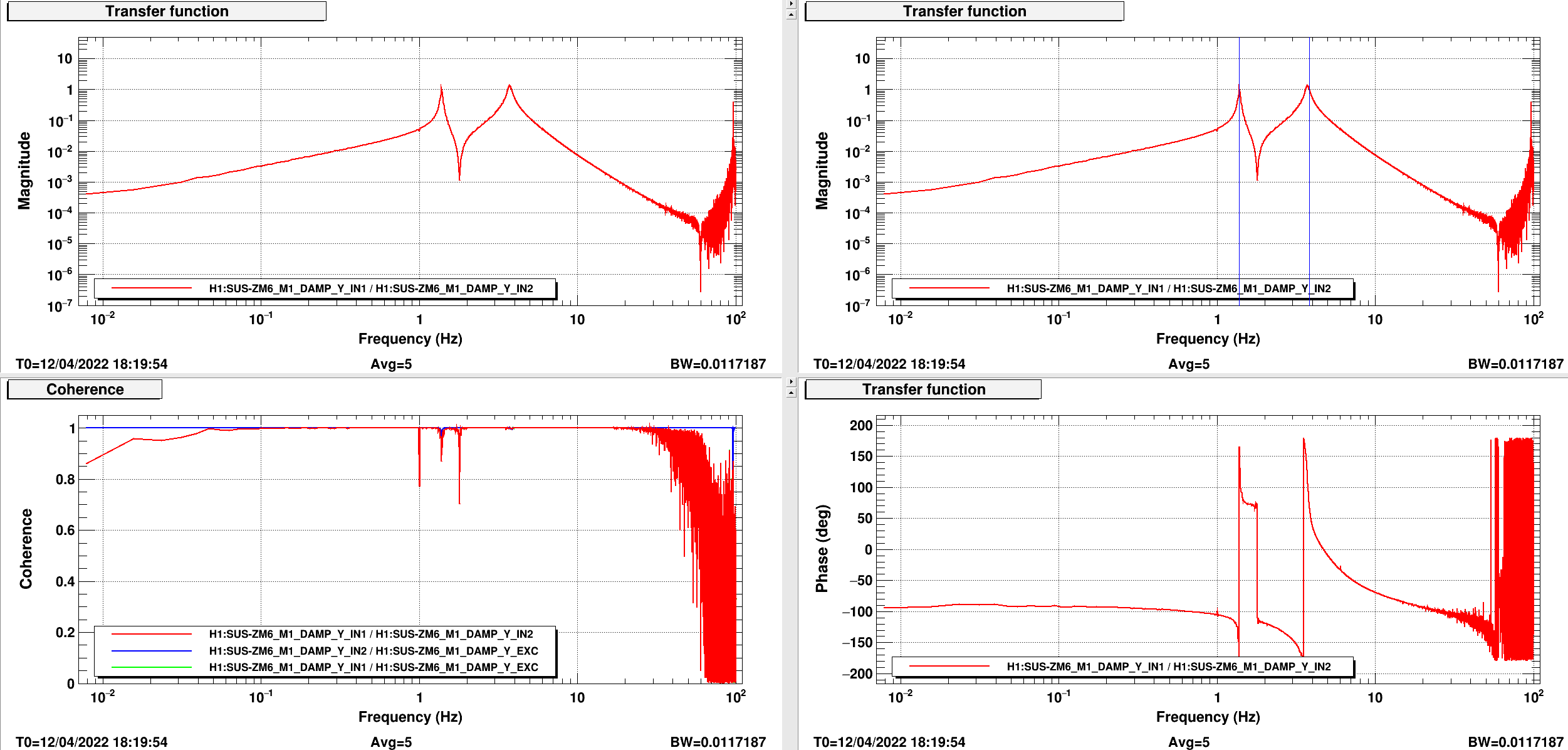
For the Yaw DOF:
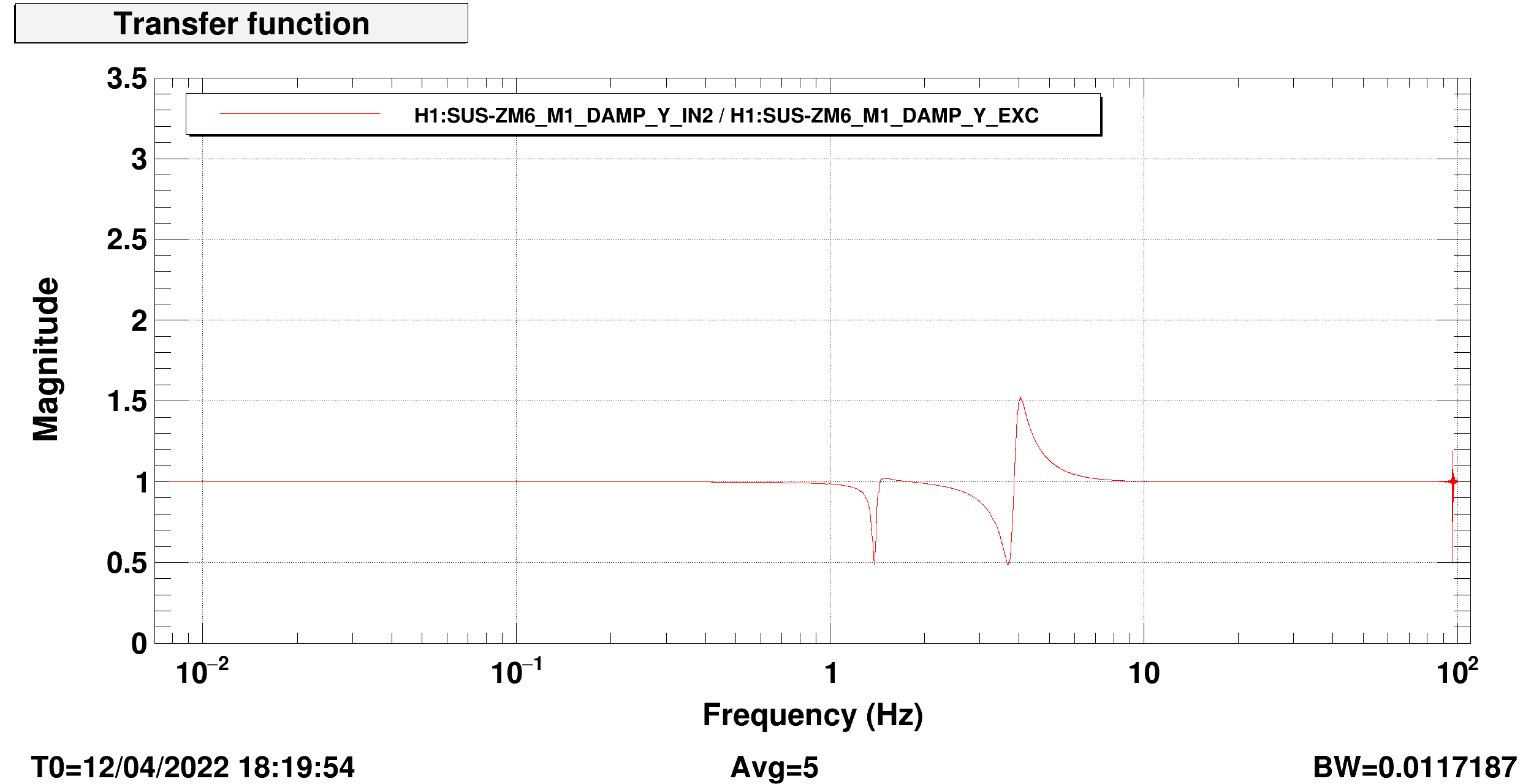
Similar to the story for Pitch, (5) shows that the lower and upper unity gain crossing, denoted by the blue vertical lines, which again, means that the system may or may not be unstable depending on what the phase is at the unity gain crossover frequency. So we turn to (6) where we see gain peaking of ~1.5, again, we suspect that this value should be much larger, or could it be that the system is marginally stable, and again I say... no bueno to either option.
(5) H1_SUS_ZM6_M1_Damp_Y_OpenLoopGain.jpg
...same story as (1) but for Yaw.
(6) H1_SUS_ZM6_M1_Damp_Y_LoopSuppression.jpg
...same story as (2) but for Yaw.