craig.cahillane@LIGO.ORG - posted 18:34, Thursday 02 June 2022 - last comment - 13:28, Friday 03 June 2022(63431)
ISS DC second loop successfully engaged in lock, pico on ISS QPD and array
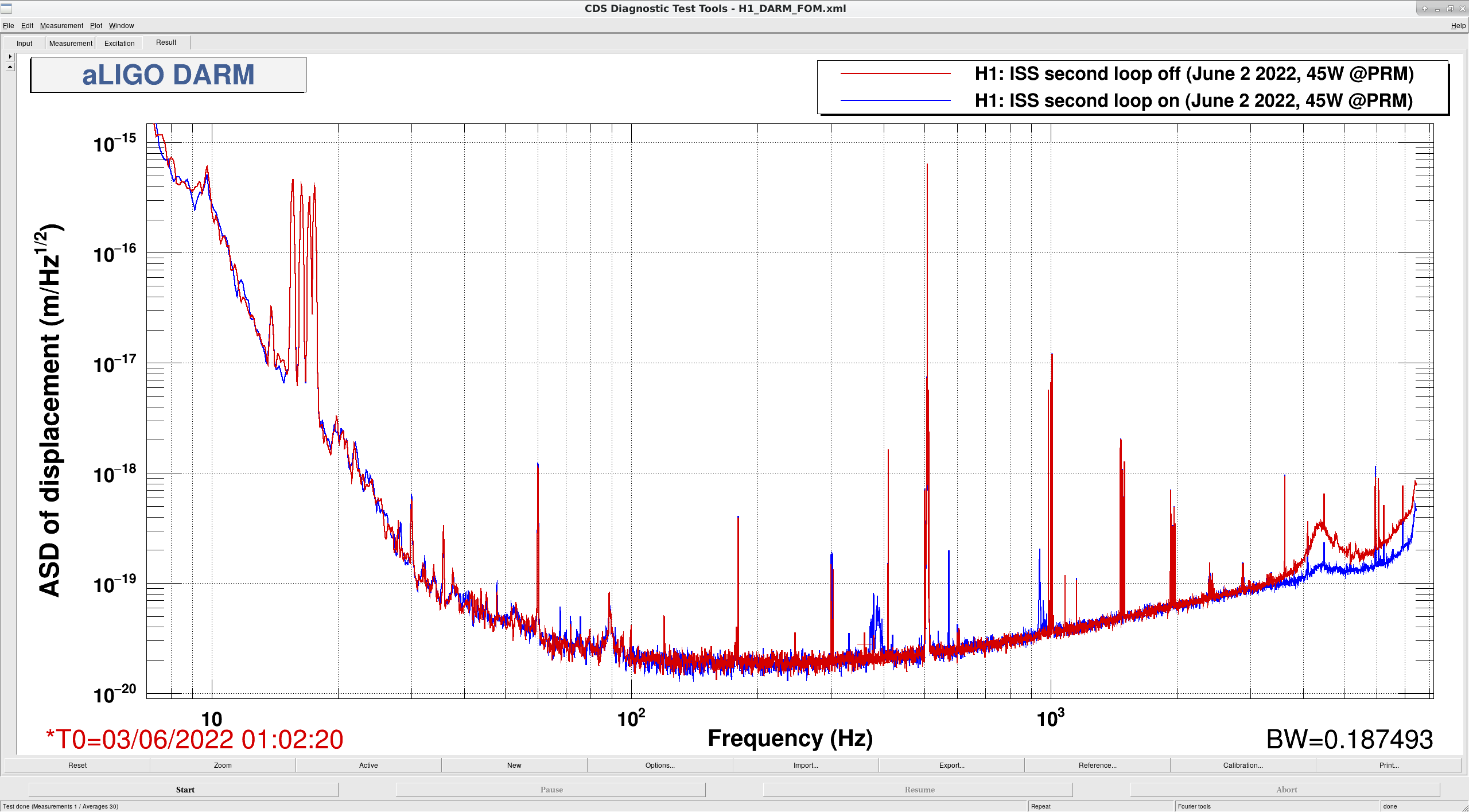
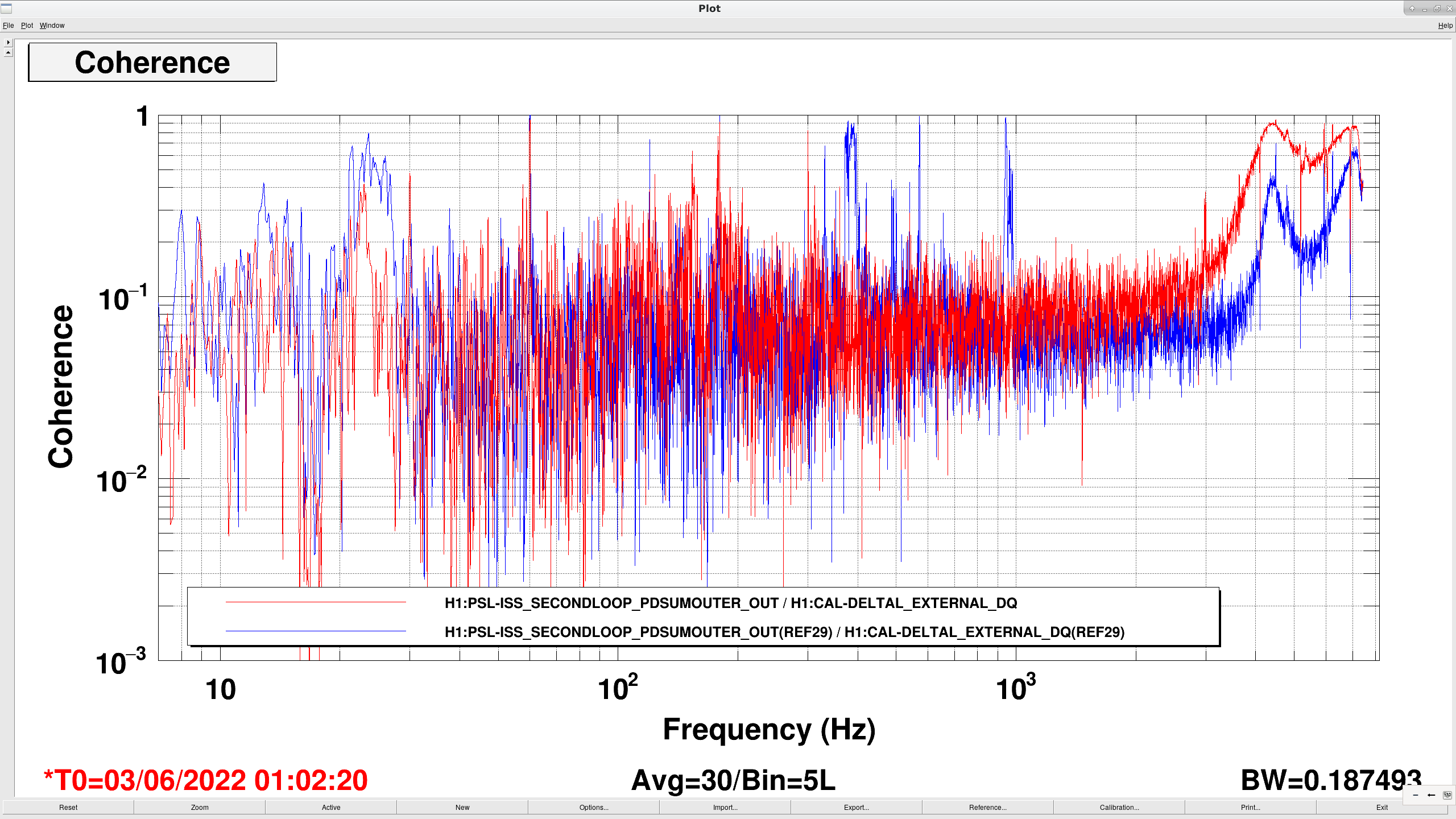
We successfully engaged the ISS second loop at high power. This reduces the big hump above 4 kHz, but introduces a new bump at 380 Hz. We confirmed this with an off-on-off test. We left the ISS second loop on for future locking attempts. ISS second loop closure procedure --------------------------------- Daniel worked some magic on the ISS second loop today to solve some of the issues I was having last week (alog 63366) Mostly, we opened the second loop using the IMC_LOCK OPEN_ISS state, then turned on by hand the H1:PSL-ISS_SECONDLOOP_CLOSED switch (the one that the Guardian doesn't know about), then fudged around with some offsets to avoid a massive transient in the diffracted power, then closed the loop using the IMC_LOCK guardian. First, he adjusted H1:PSL-ISS_REFSIGNAL on the first loop so that the diffracted average power was equal to minus H1:PSL-ISS_SECONDLOOP_REFERENCE_DFR_CAL_OFFSET, which right now is -2.2. This sets the diffracted power the second loop will seek to achieve, in this case 2.2 percent. Second, he adjusted H1:PSL-ISS_THIRDLOOP_OUTPUT_OFFSET to zero H1:PSL-ISS_SECONDLOOP_EXC_MON in the Slow Offset Servo, which takes a while because the bandwidth of this servo is very slow. The CTRL signal was monitored to see when the change to the OFFSET had converged. This enables engaging the ISS second loop without a big transient, since the ERR2 signal will already be near zero. Finally, we clicked ISS_ON on the IMC_LOCK guardian, and the transient was small enough that we didn't lose lock. You still have to be careful, because I clicked ISS_ON again later while doing the off-on-off test and blew the lock because the ERR2 signal was not close enough (I should have adjusted the H1:PSL-ISS_THIRDLOOP_OUTPUT_OFFSET again). Picoing in HAM2 --------------- Before that, we pico'ed onto the ISS QPD to the same position we had in O3 (O3 pitch = -0.4, O3 yaw = -0.04). The pico we moved is labeled on medm as the HAM 2 + oplev, controller 5 PICO B, and is the 8th motor (PSL ISS QPD/PD (PM5)). It should be one of these mirrors on the path to the ISS array, after the IM4 Trans pickoff. As we moved the mirror, the ISS array PDs reported more power, consistent with what we had in O3. The ISS QPD segments 1 and 2 are close to saturating the ADC, but the ISS array PDs are at around 11000 cts and should be fine for all input powers. Noise ----- The 4 kHz hump goes down with the second loop on, we are probably only gain limited on that noise (probably UGF = 10 kHz or so) Robert noticed that with the ISS second loop engaged there is an additional peak at 380 Hz, probably from some mirror in the ISS array path. We may try steering again with pico to try to remove this noise. EDIT: Changed procedure section about ISS secondloop engagement to be more accurate.
Images attached to this report
Comments related to this report
Elenna noticed that this morning after acquisition the diffracted power was around 5.5%, decreasing the input laser power. After investigation, I think the problem was with H1:PSL-ISS_SECONDLOOP_AC_COUPLING_DRIVE_OUTPUT being too low when that output was held. We tried increasing the gain of the Slow Offset Servo, which has an integrator in the path, but no matter how high this control signal gets it has no effect on the diffracted power which acts as the error signal. Even now H1:PSL-ISS_SECONDLOOP_EXC_MON is integrating to infinity. Because this path had little control over the diffracted power, I turned off and on the ISS second loop in an effort to adjust the H1:PSL-ISS_SECONDLOOP_AC_COUPLING_DRIVE_OUTPUT held output, which is another offset in the loop. Last night, this value was previously held at 8330, when the diffracted power was around 5.7% Then this morning we held it at 8554, when the diffracted power was still too high at 3.6% Finally, I held it at 8753, which gave us a diffracted power of around 2.2% So I think this is the real important number for determining the diffracted power. Emptying the integrator in the Slow Offset Servo some effect on the diffracted power, but afterwards this servo did not fully drive the diffracted power to the value in H1:PSL-ISS_SECONDLOOP_REFERENCE_DFR_CAL_OFFSET as it should. Because of this, I'm not sure that the problem we had with too much diffracted power will not come back next lock.