Elenna, Evan
We installed (but did not turn on) a new set of damping filters in PRM M1, based on Jeff's "Level 2" filter design (G1401290).
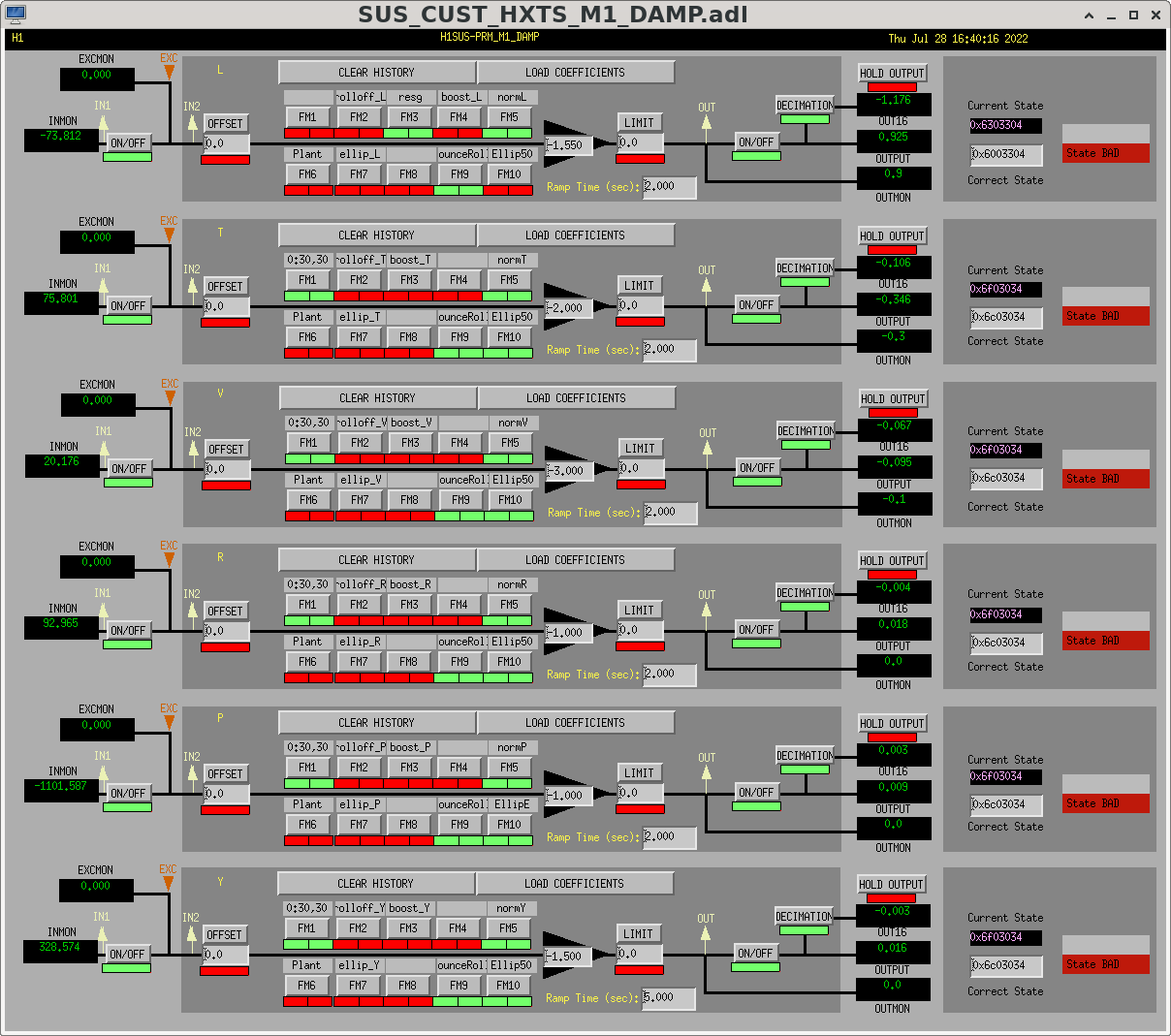
The new set uses the filter modules called rolloff_X, boost_X, normX, ellip_X, and BounceRoll. The overall gain has been adjusted to match the current gain near the upper UGF of each loop, so it should be possible to engage these with the same EPICS gain as is currently set.
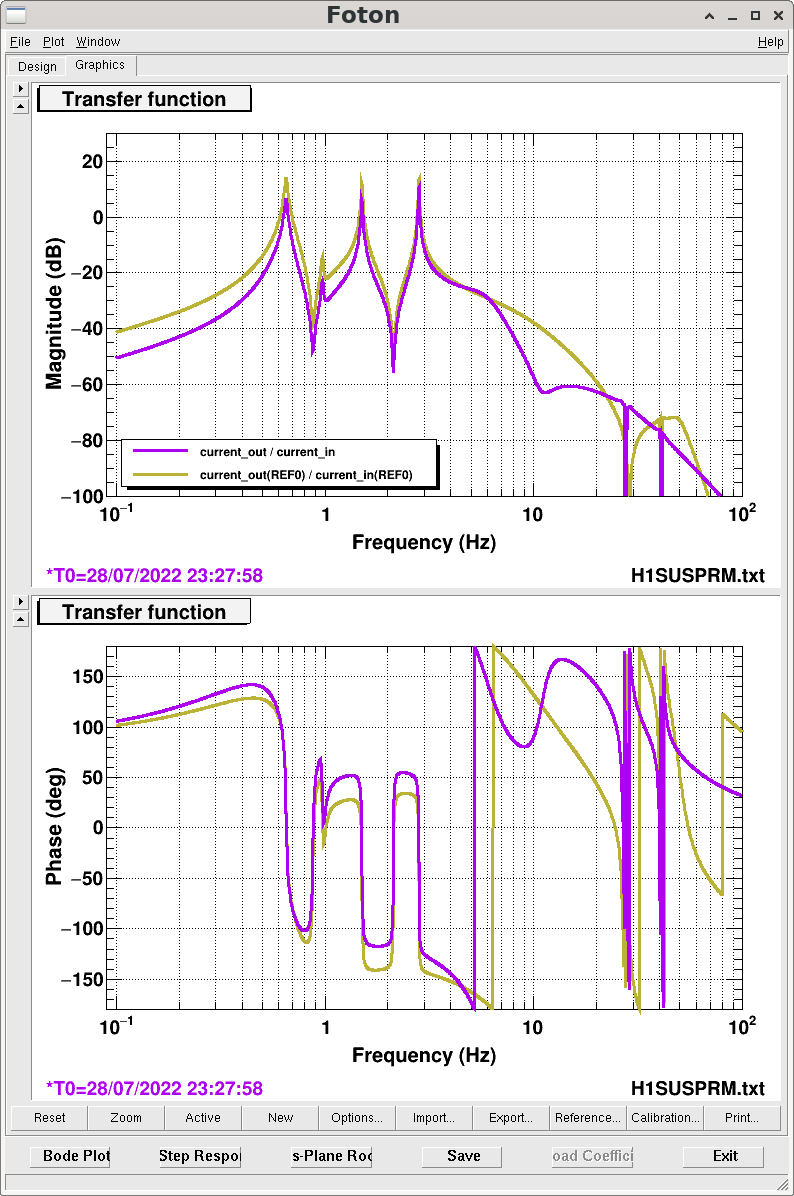
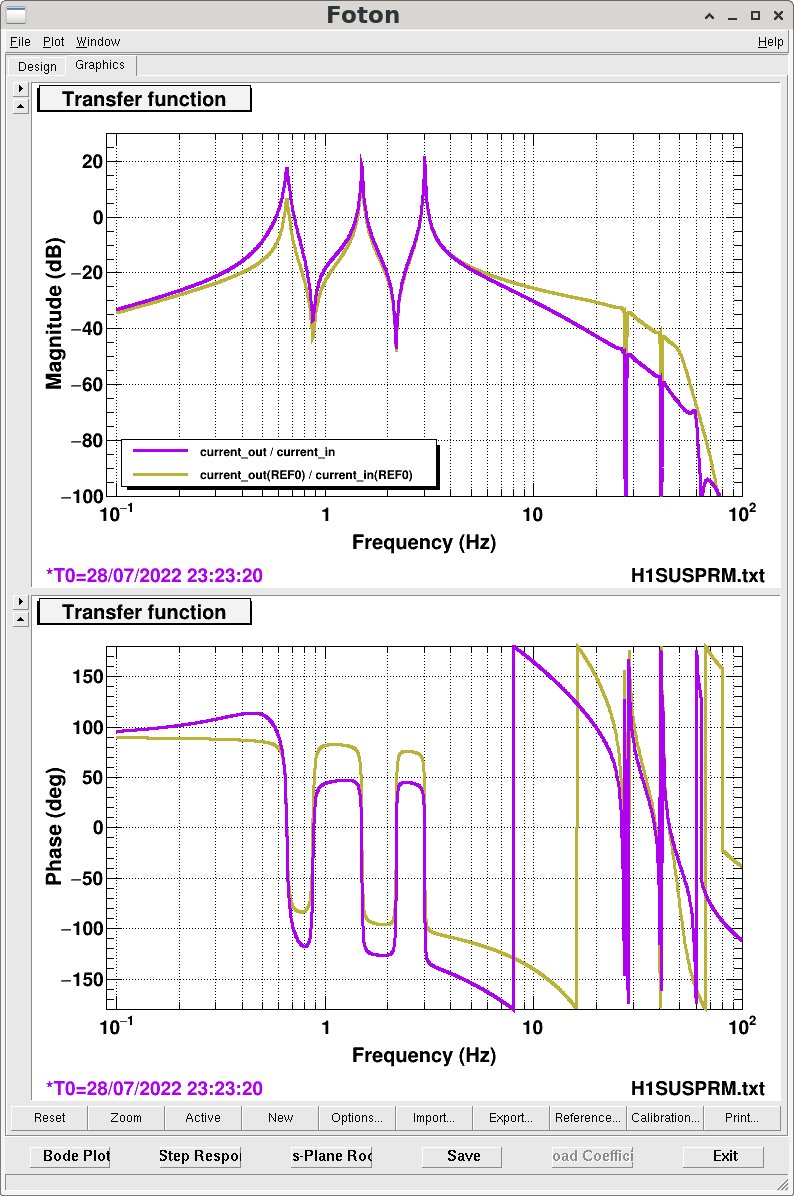
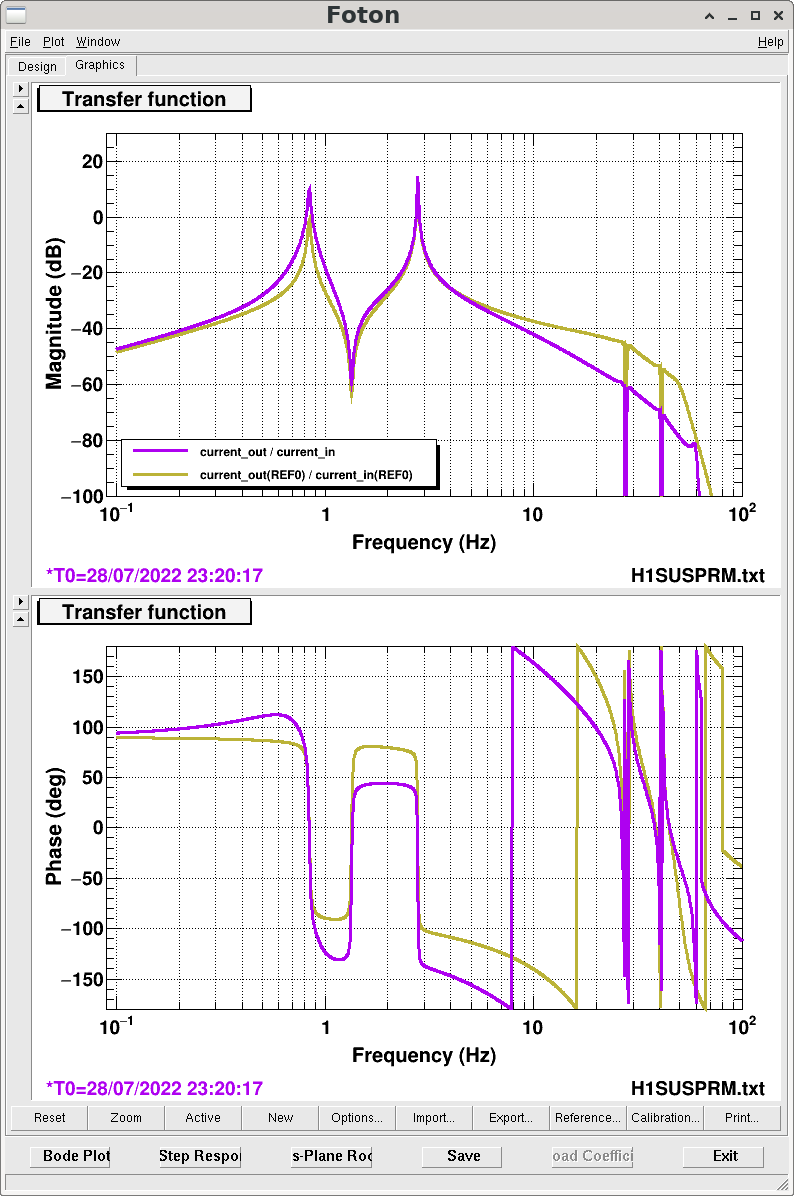
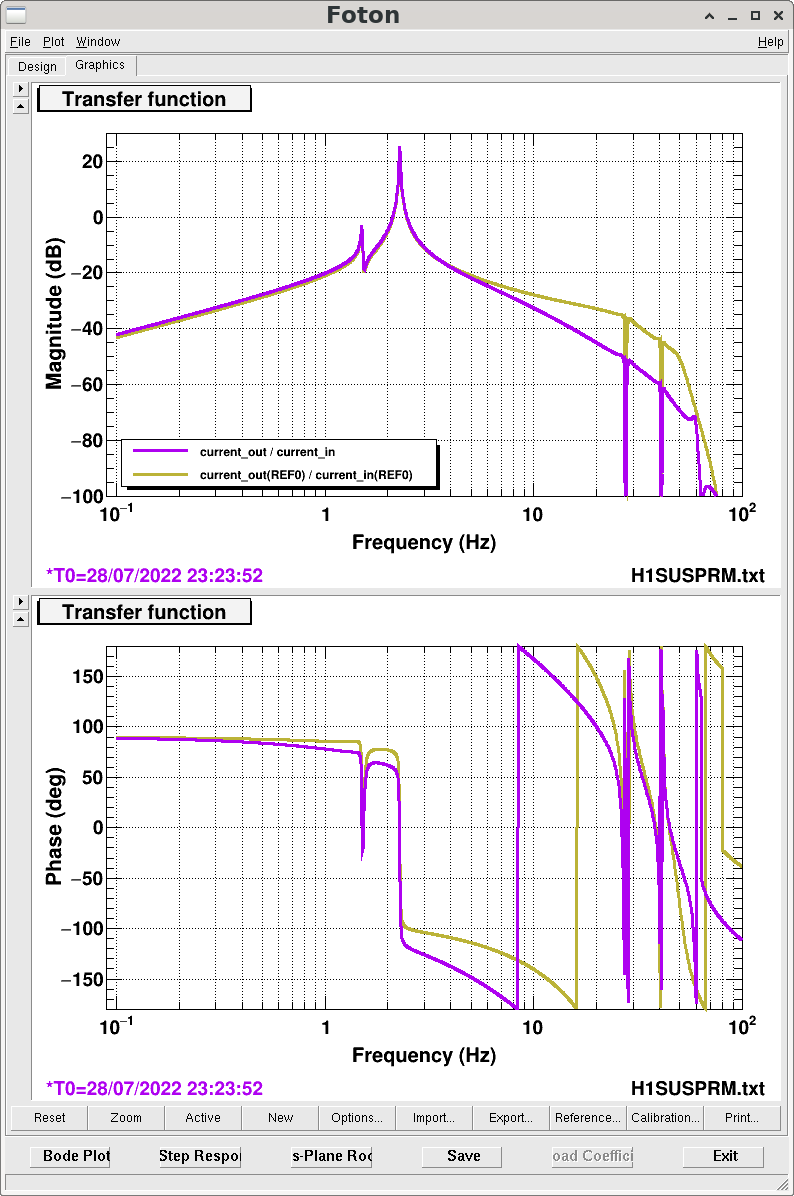
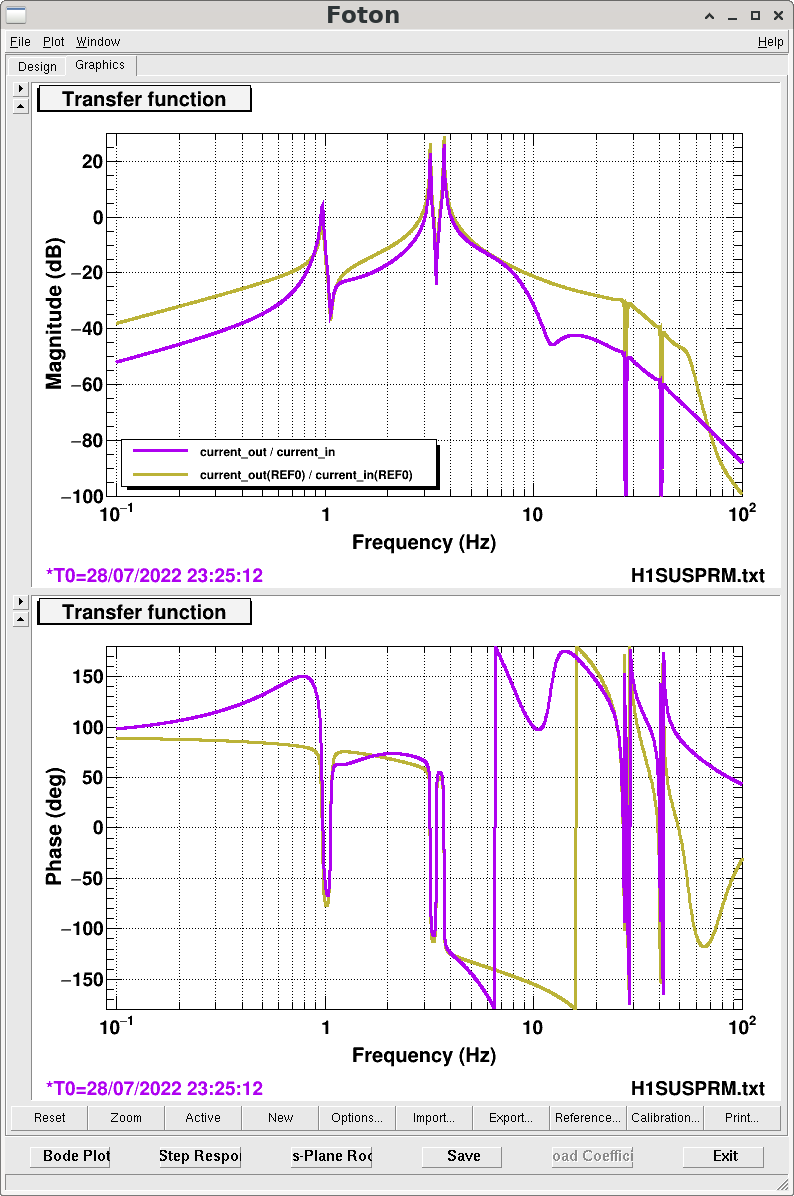
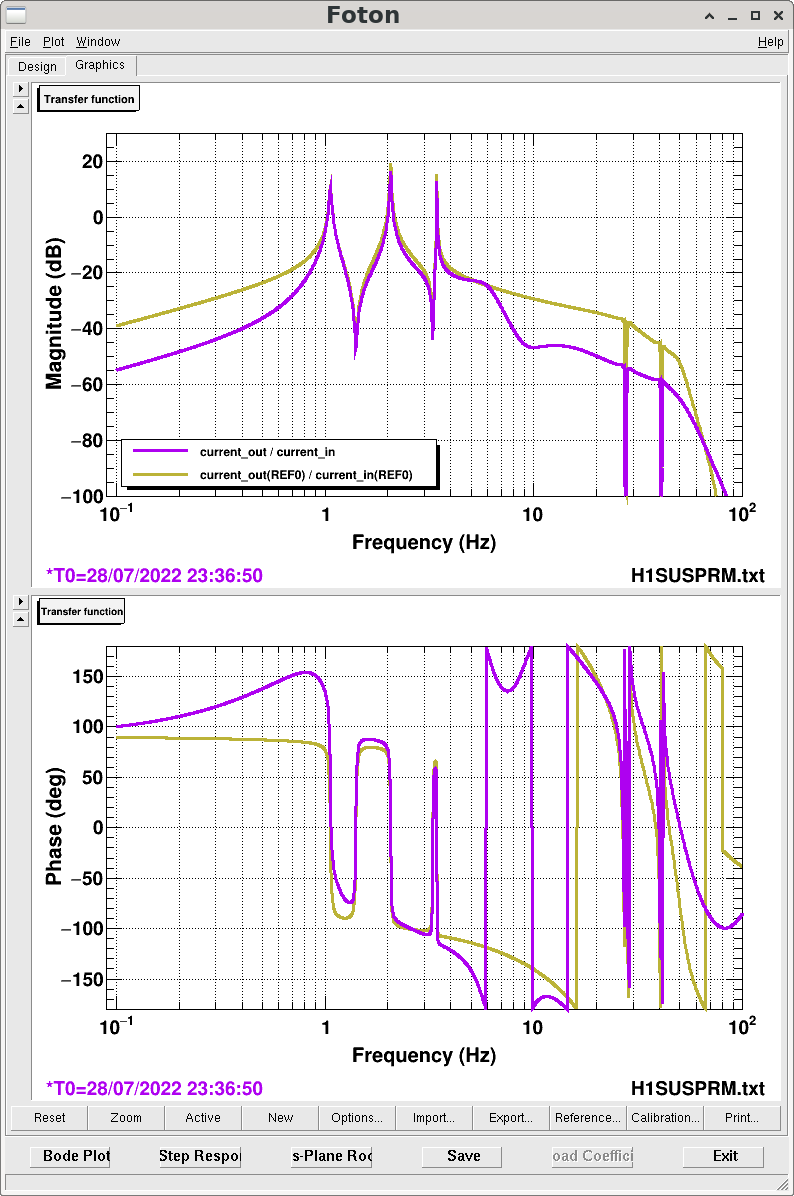
The first attachment shows the PRM damping in its current state (note the varied EPICS gains). The other attachments show the current versus new loop designs.
Since PRM (and other HSTSs) are used for lock acquisition, some care will be required to verify that these new loops do not cause excessive ringing. OLTFs and step responses are required.
If these work they should be cloned to the other HSTSs, which currently are not all in an identical state.
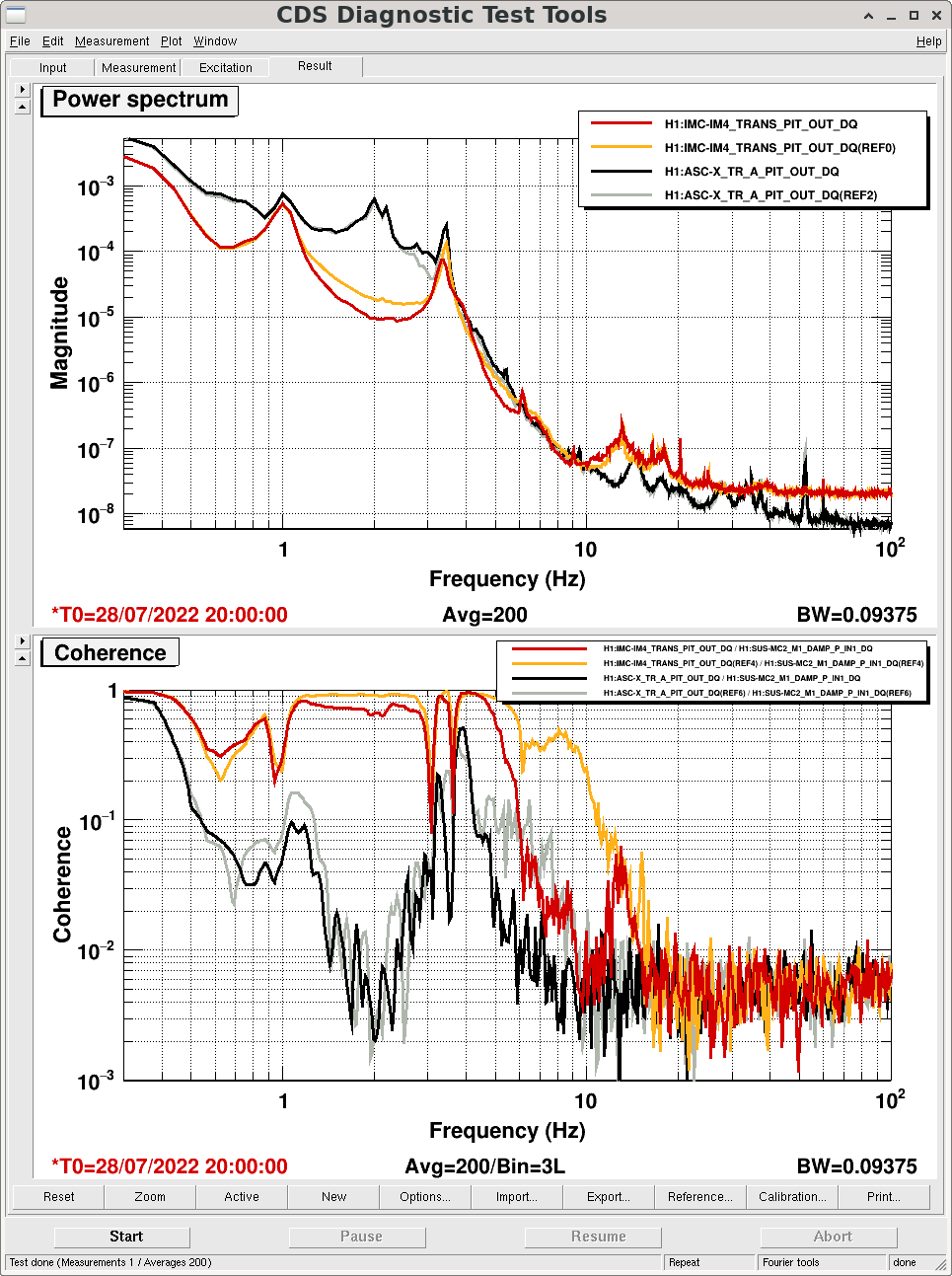
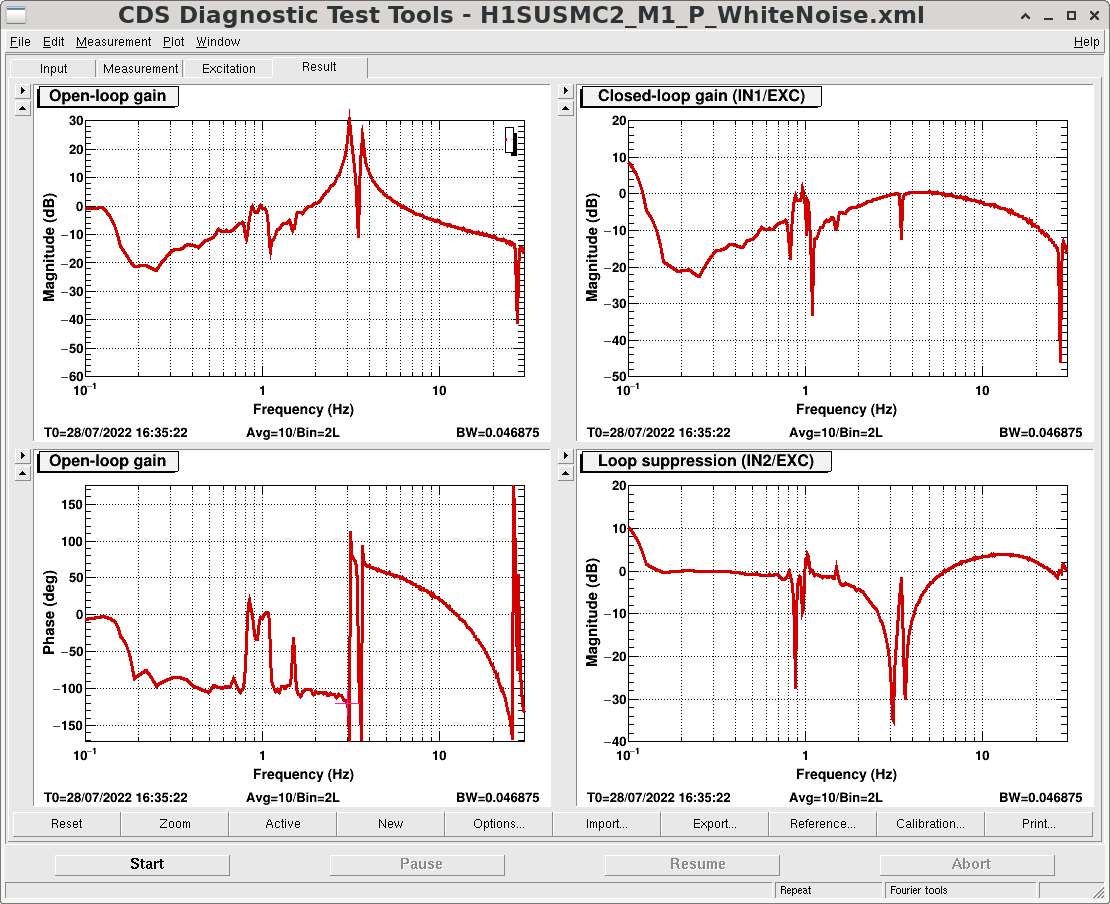
I did, however, engage new SUS-MC2_M1_DAMP_P damping filters (imported from Livingston) to remedy a rather large amount of sensor noise injection from this DOF.
If this causes issues, the old configuration used FM1, FM5, FM9, FM10 with an EPICS gain of −6. Before/after coherences on some pointing loops attached, along with the OLTF measurement template.

Jeff Kissel loves this. Tagging CSWG and SUS.