jeffrey.kissel@LIGO.ORG - posted 16:15, Friday 12 August 2022 - last comment - 13:46, Tuesday 27 September 2022(64466)
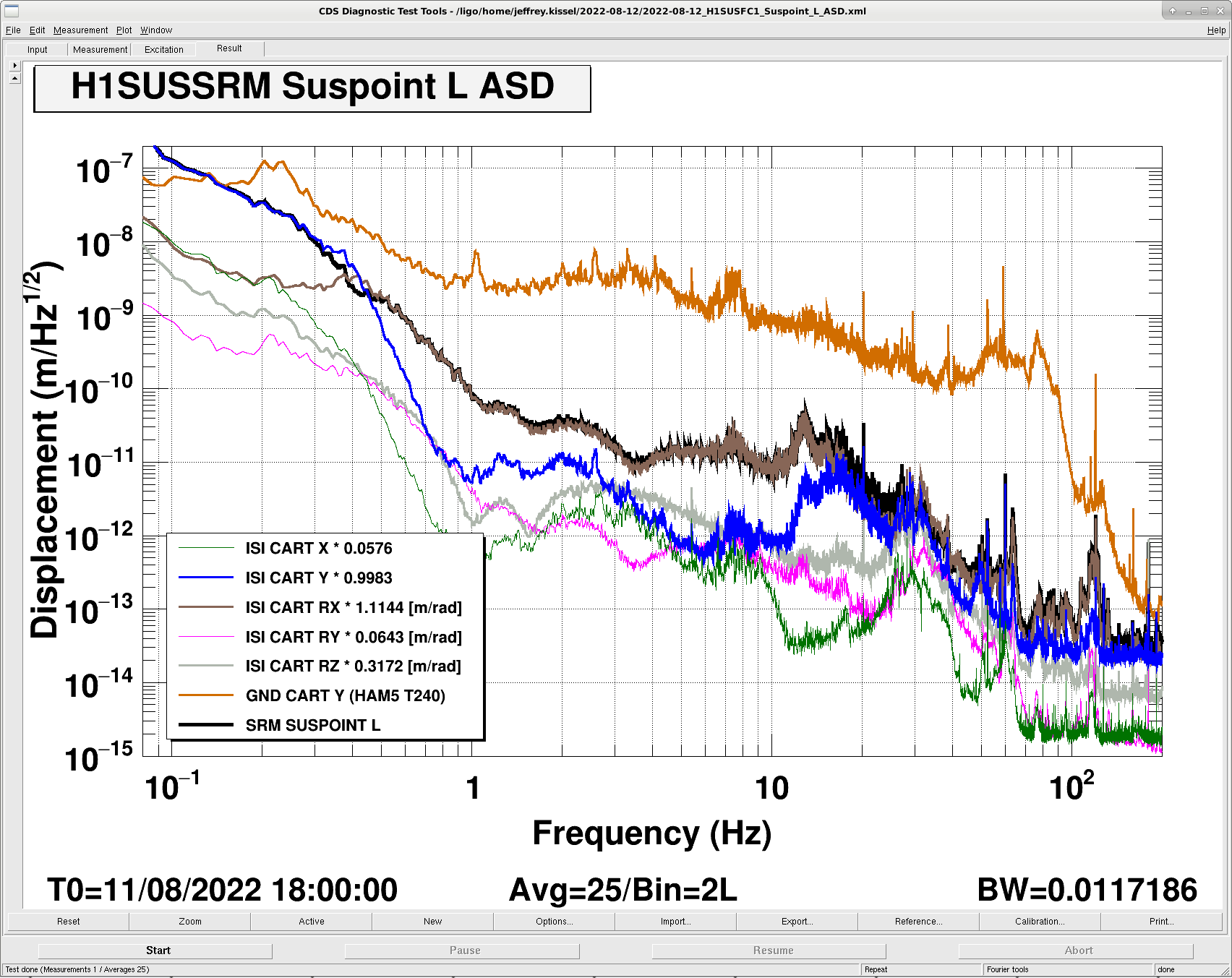
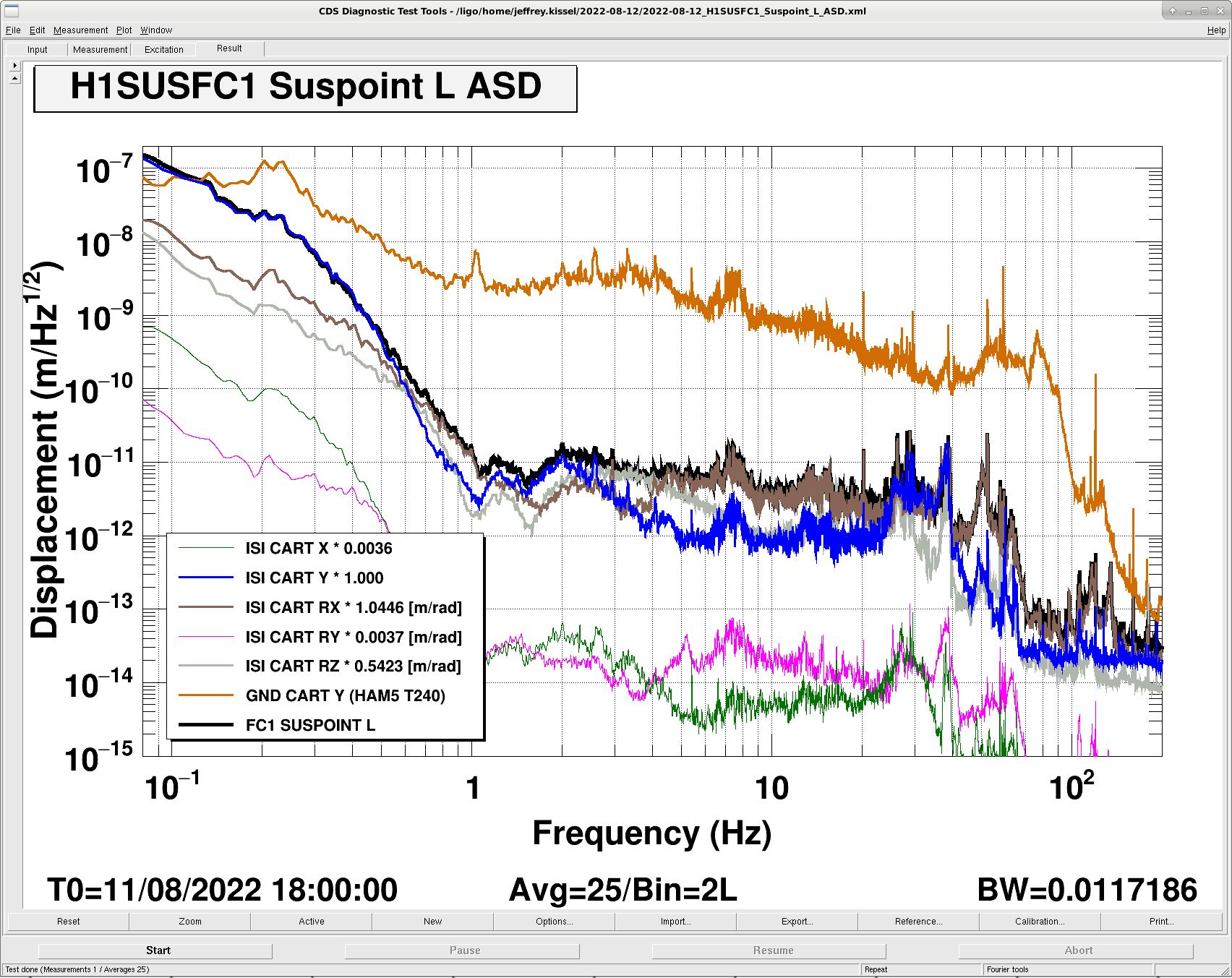
Displacement Noise Comparison Between SRM and FC1 SUSPOINT Displacement
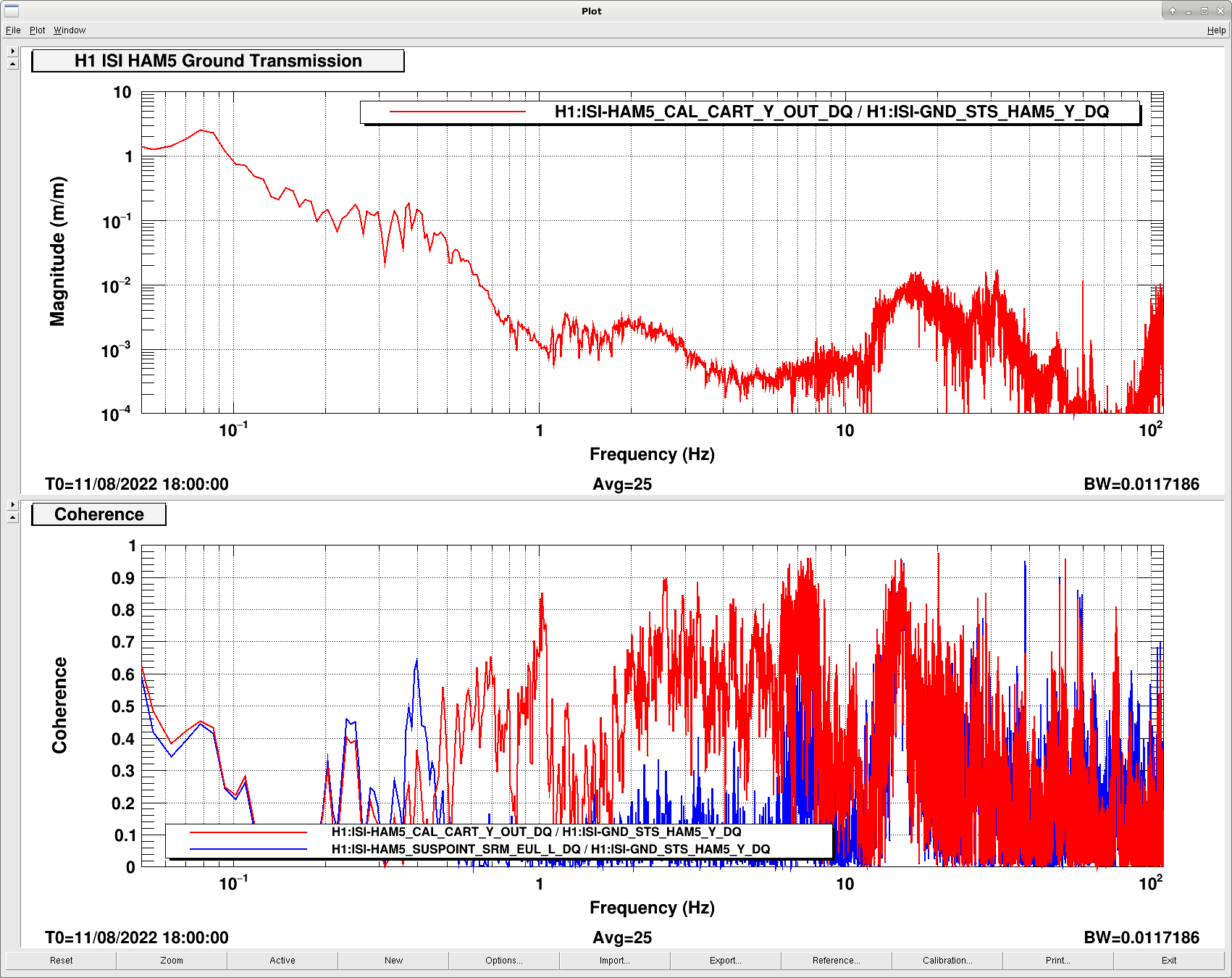
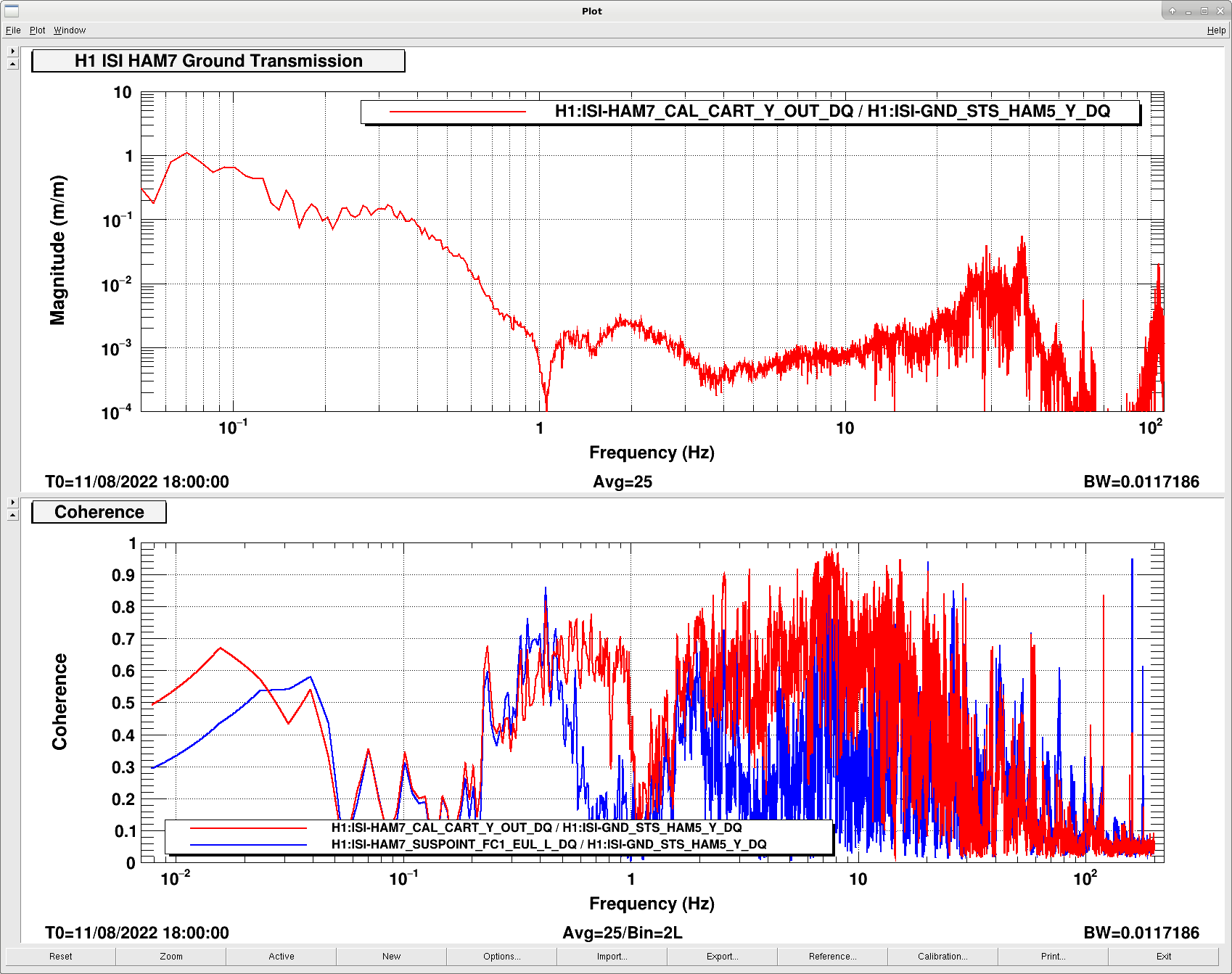
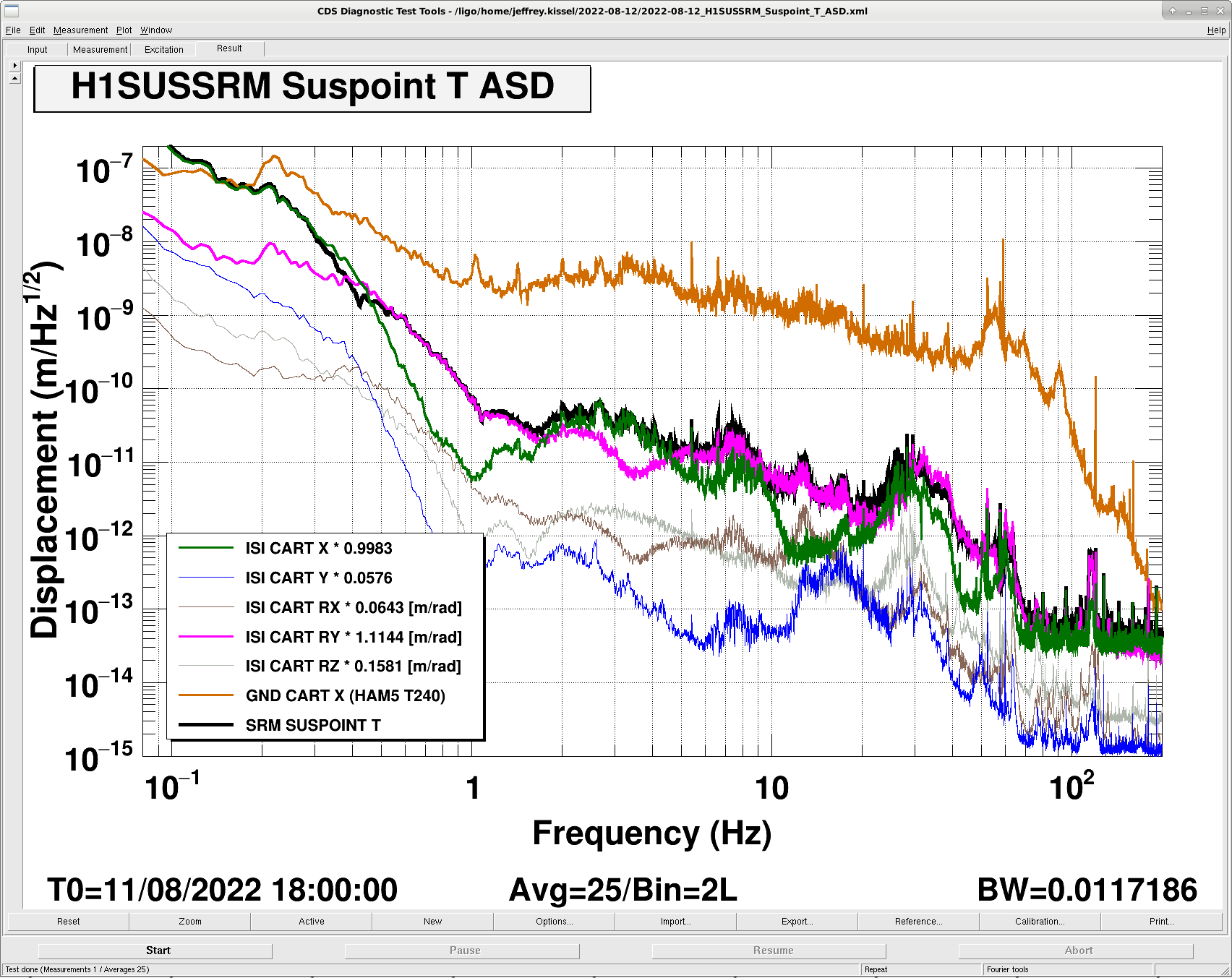
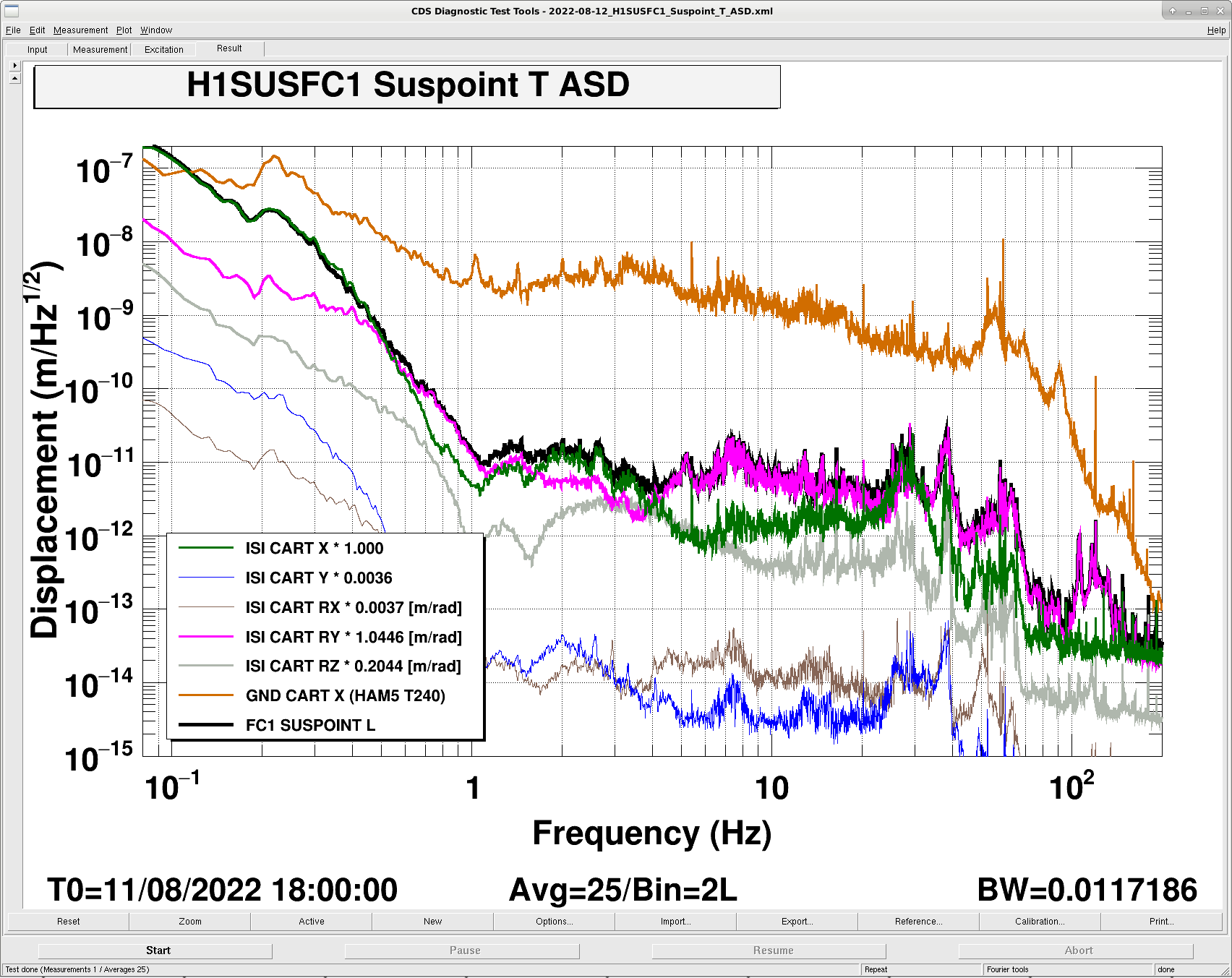
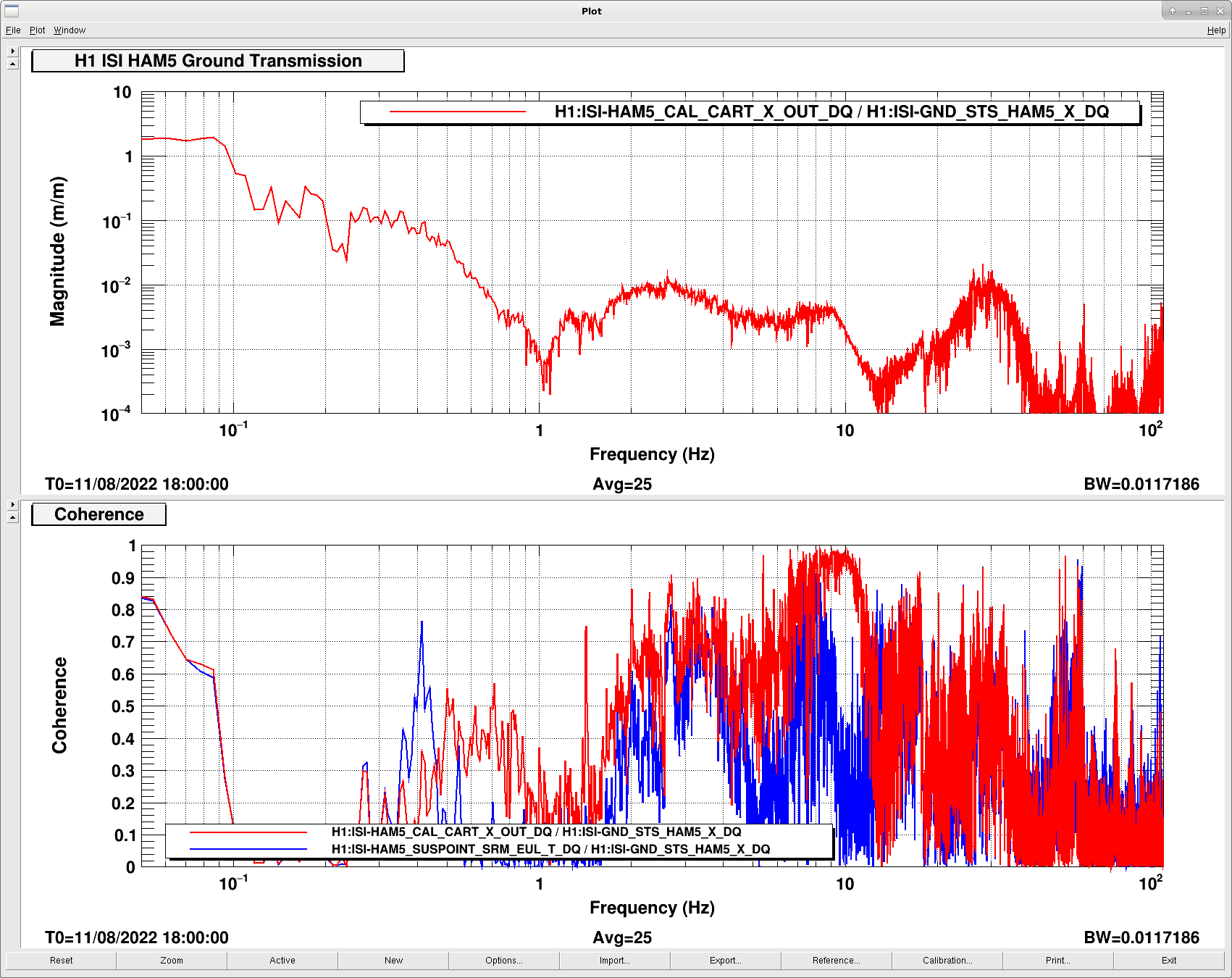
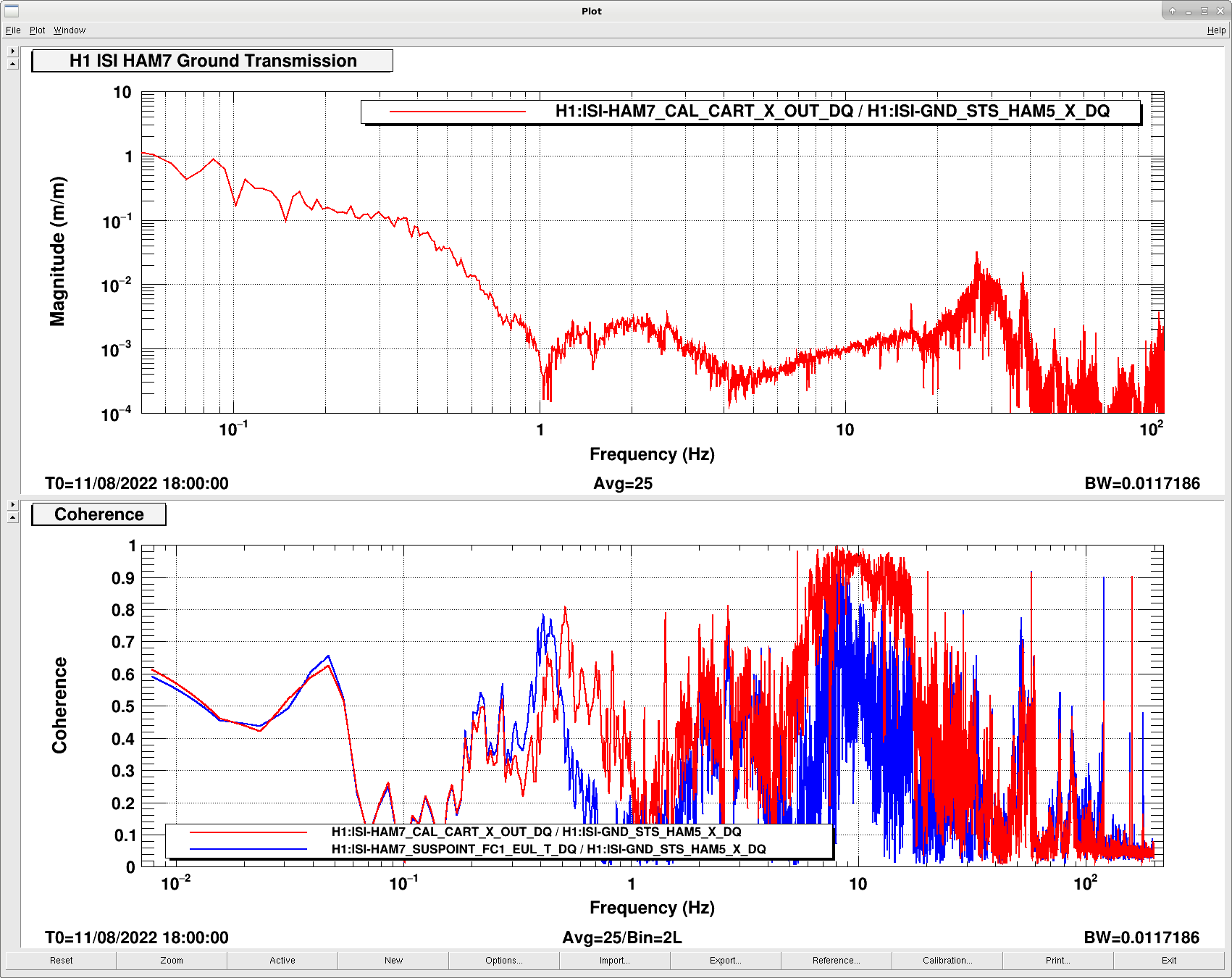
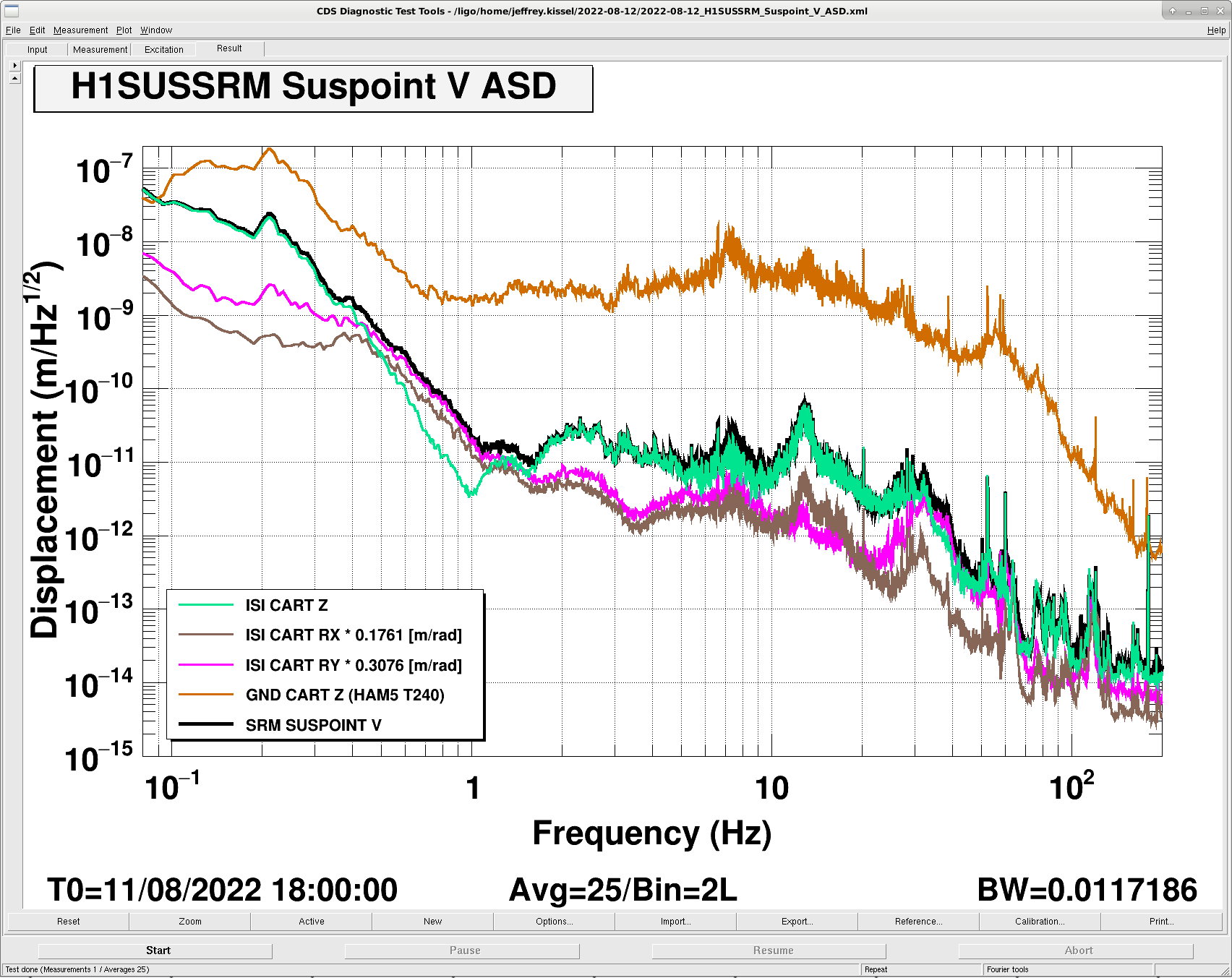
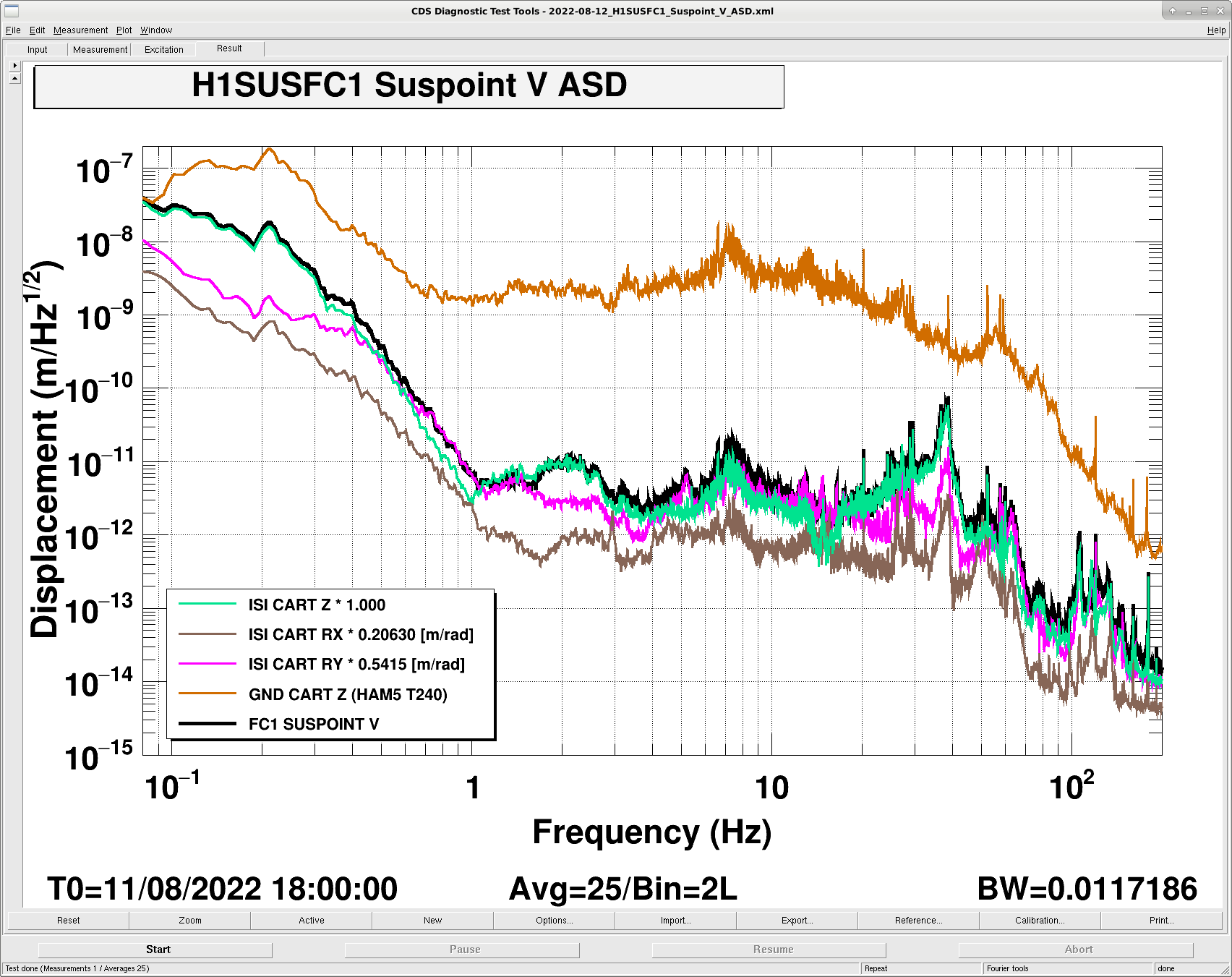
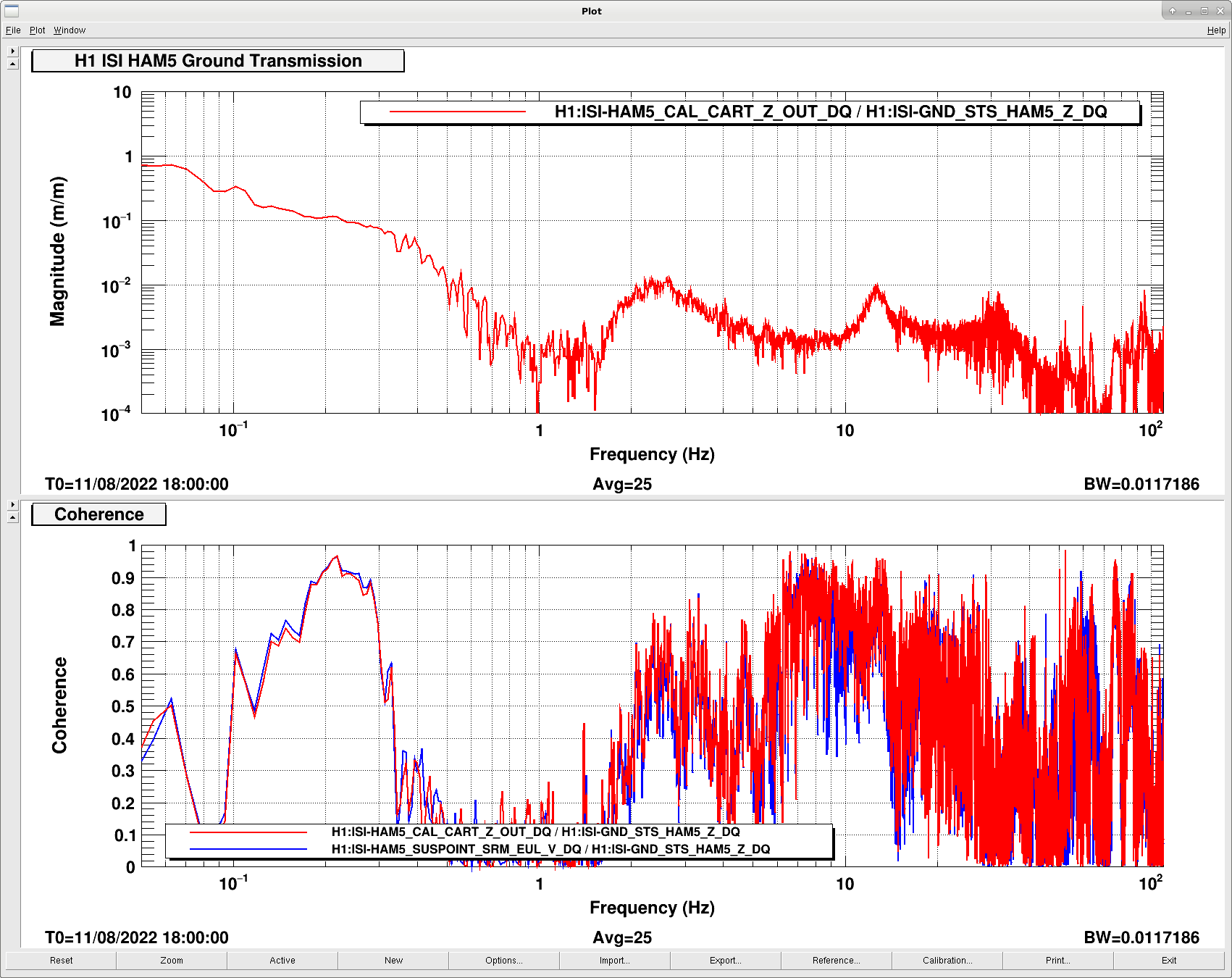
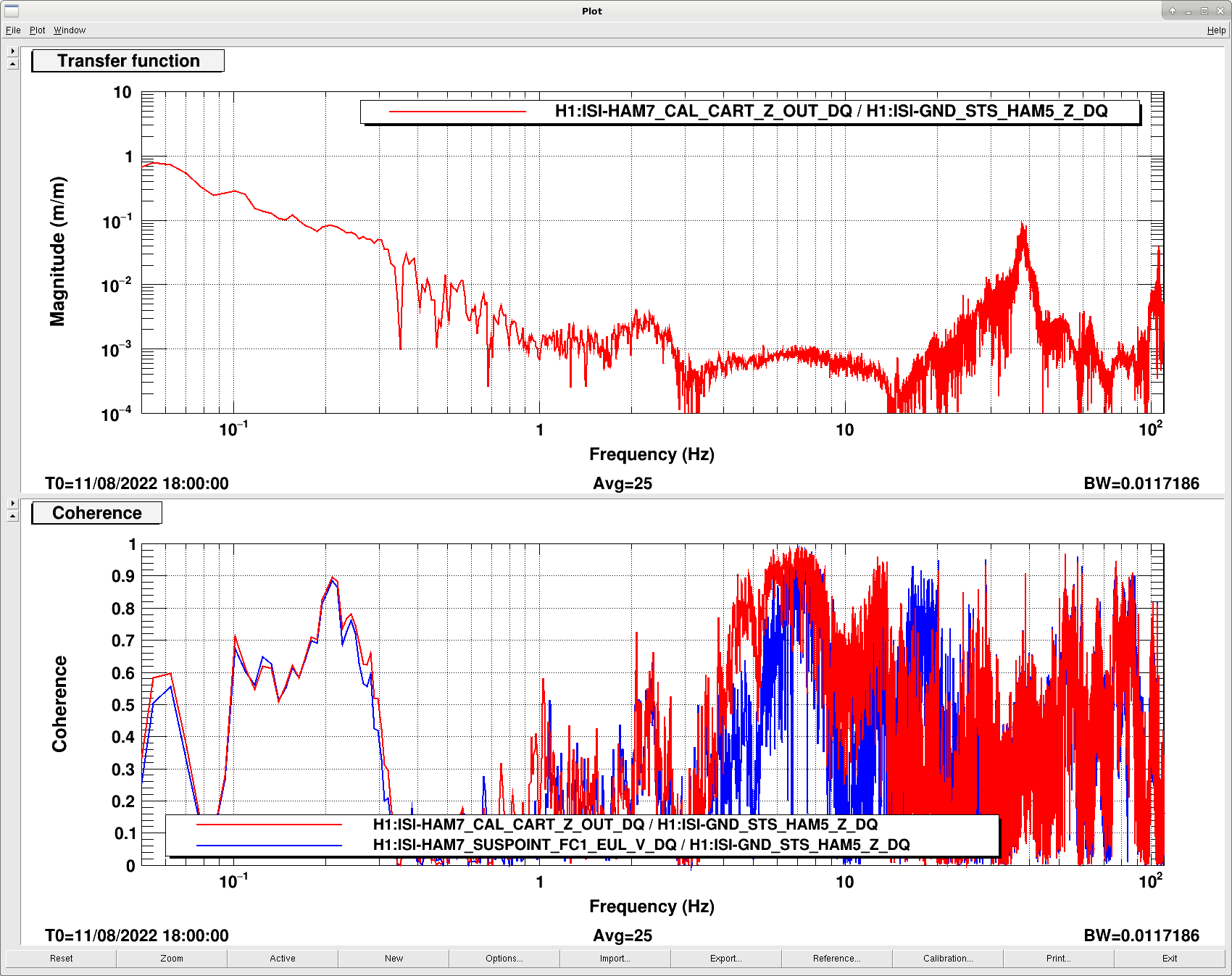
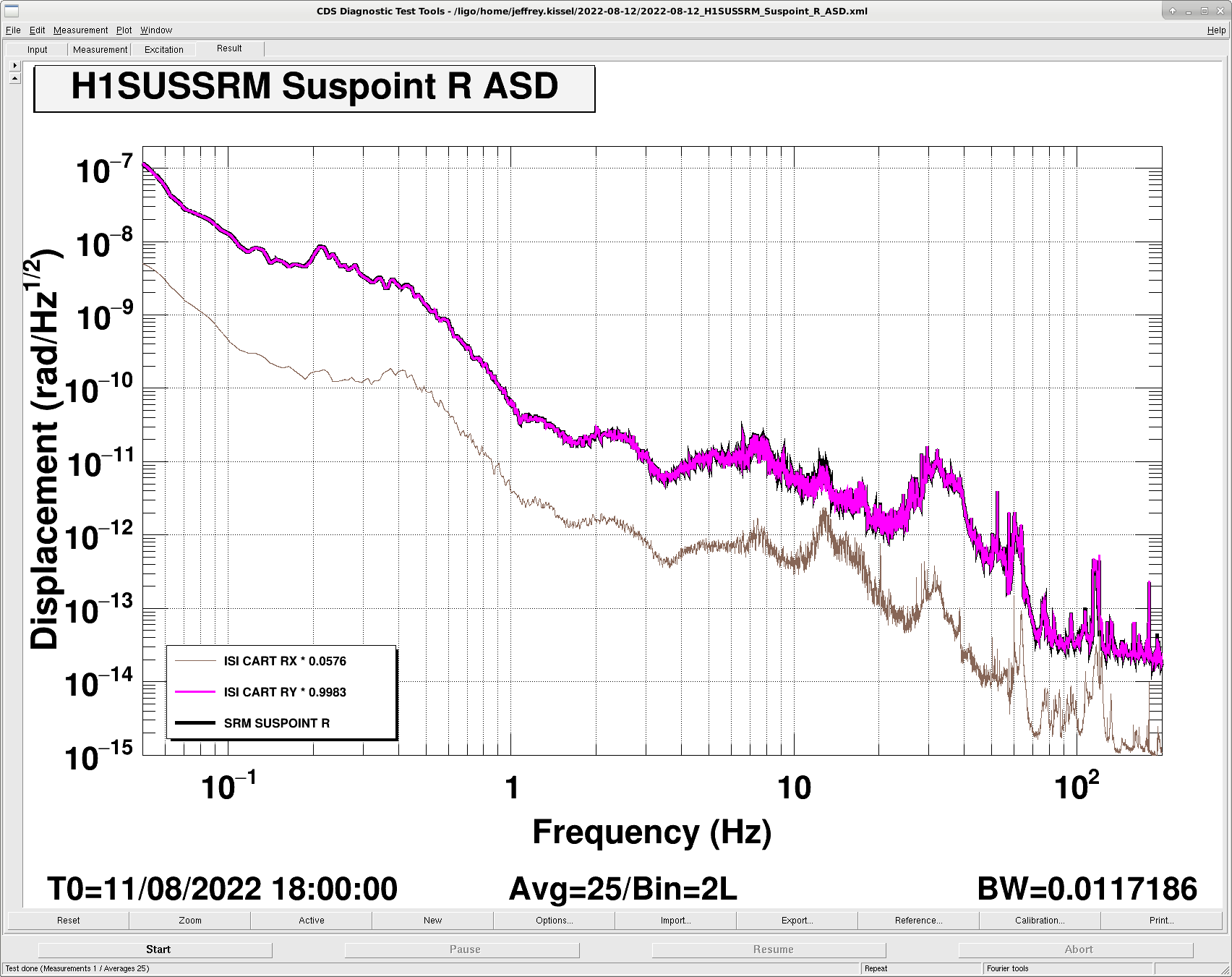
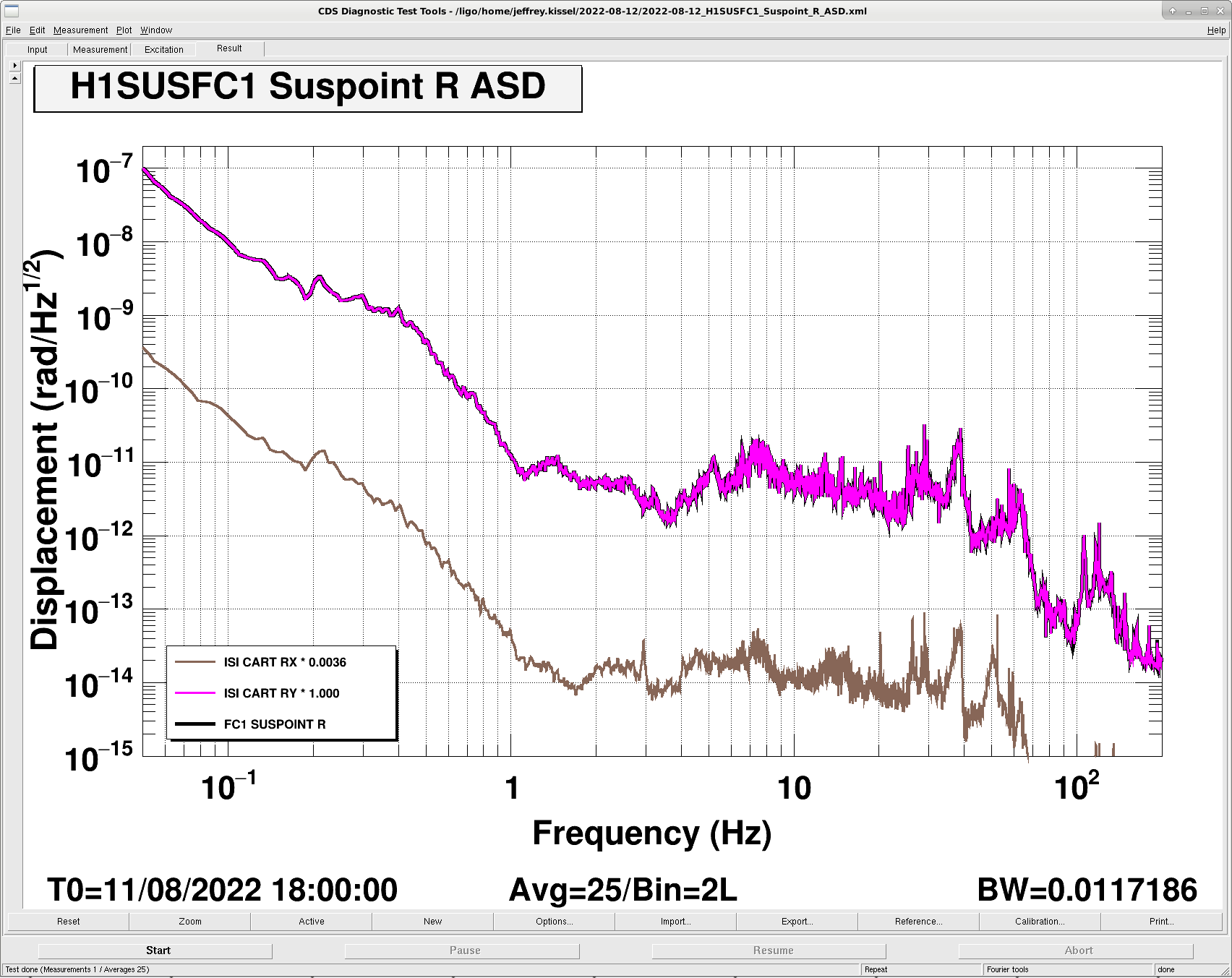
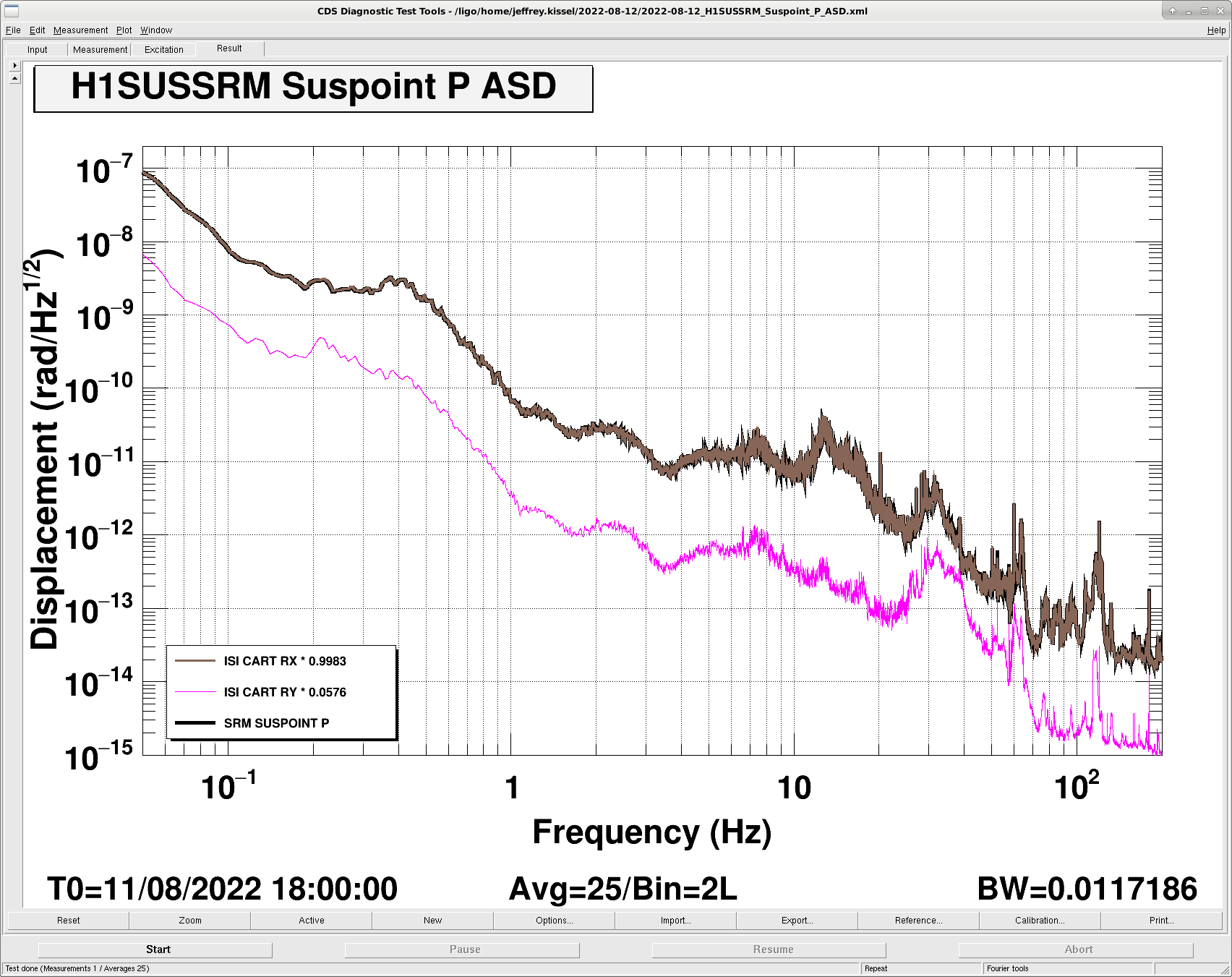
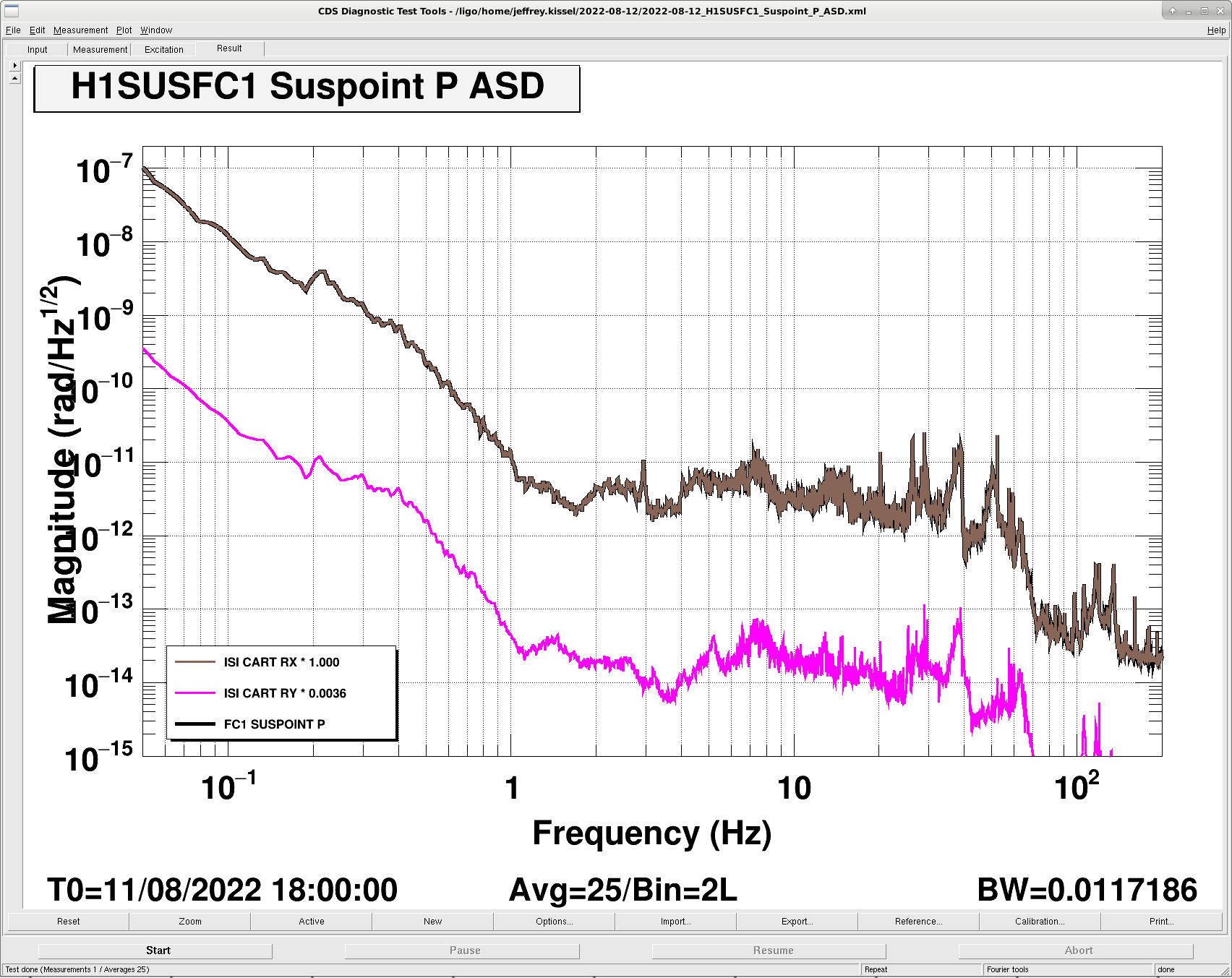
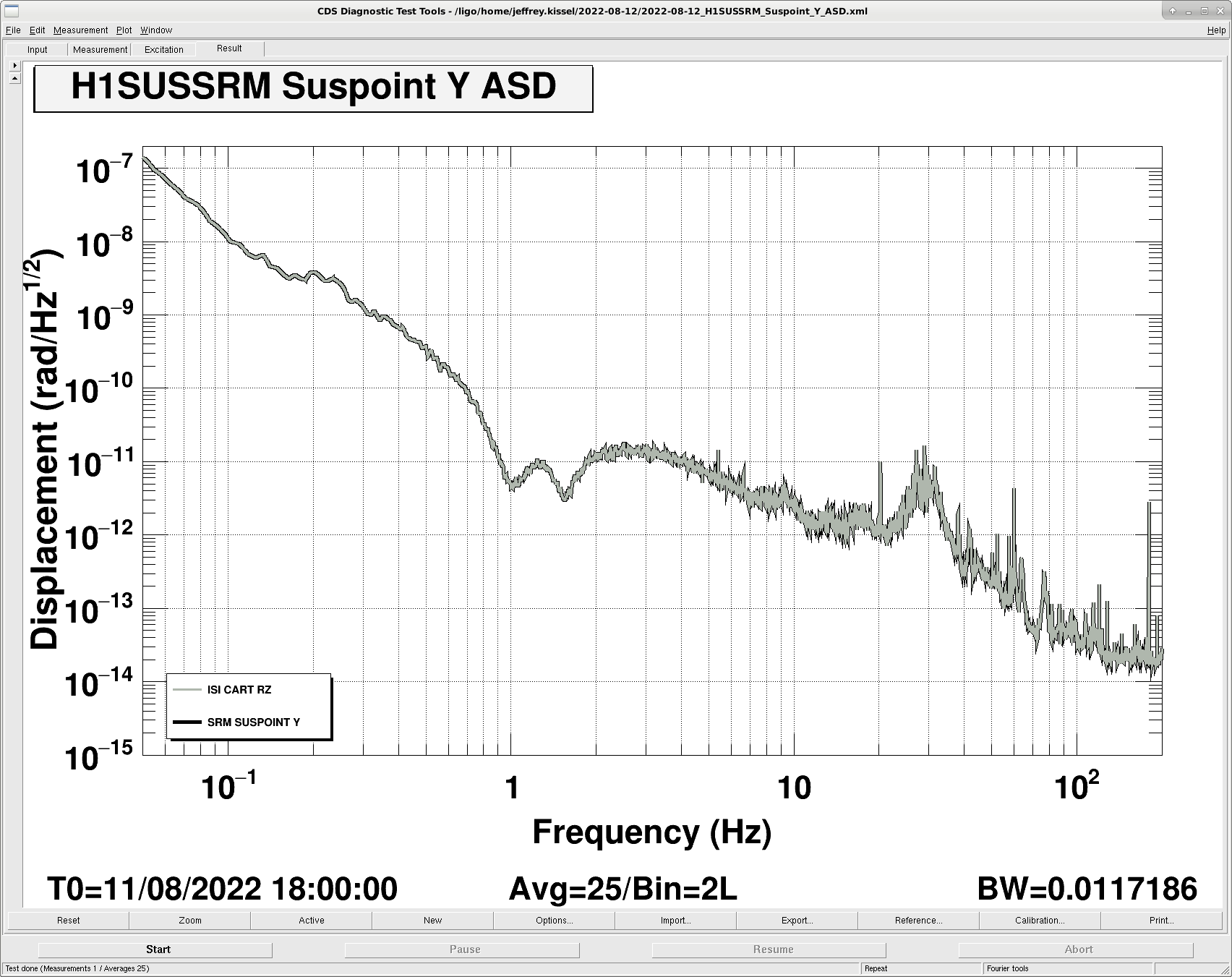
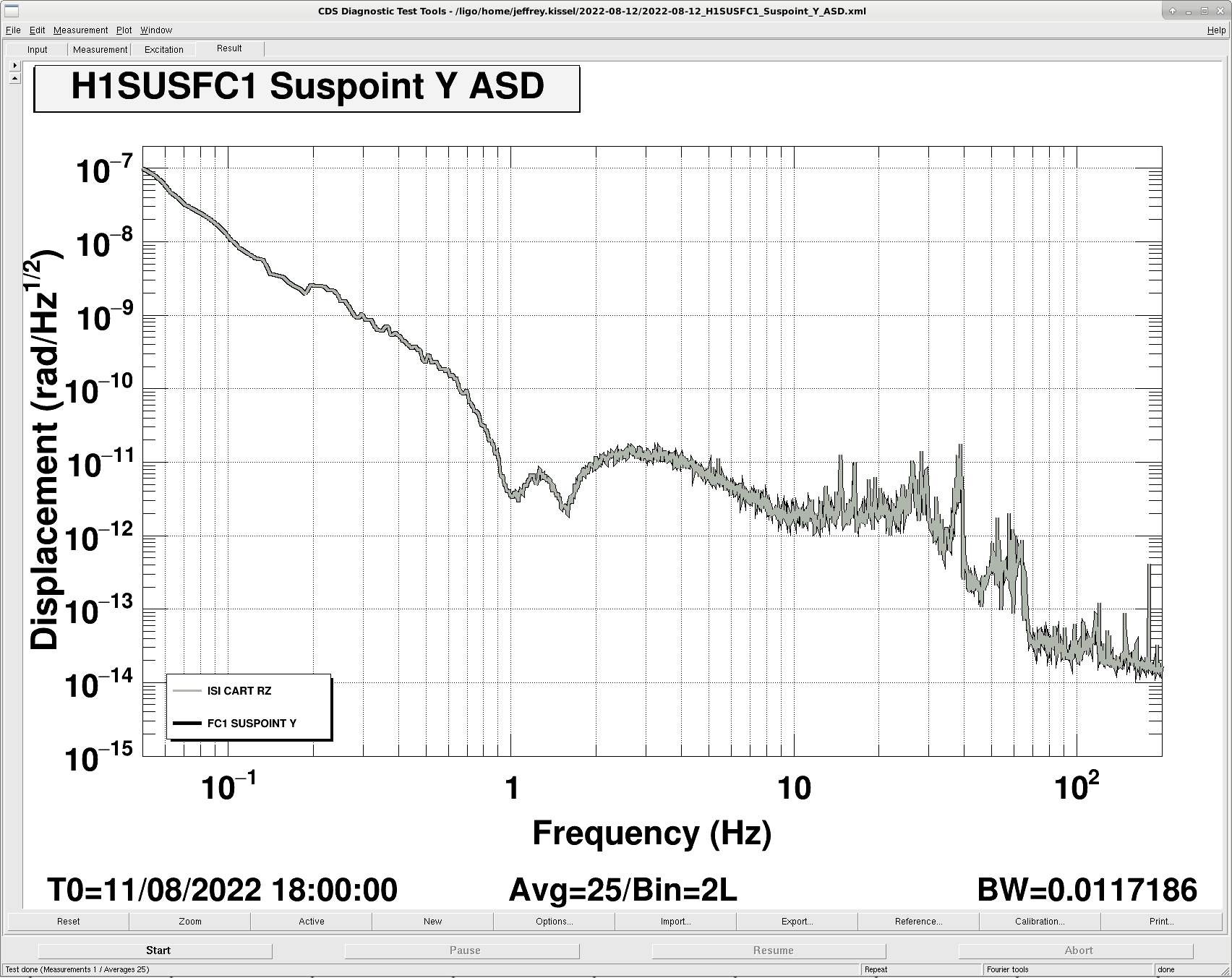
J. Kissel I've been asked to re-model the displacement noise of FC1 and the ZMs using a different model of the input displacement noise from the HAM7 ISI, because it doesn't have a HEPI (Hydraulic External Pre-Isolation) system, but instead an RESS (Rigid External Support Structure) system. As such, I gathered some data comparing all six DOFs between HAM5 / SRM and HAM7 / FC1, now that we've got suspension point calculations from FC1 live in the front-end. This is a lot like what Arnaud did in LHO:63772, except: - He used SR3 (an HLTS) instead of SRM (an HSTS) so the projections are a bit different, and - He calibrated the GS13s and ran the projections offline because the real-time system wasn't ready, and - His data is from June, mine's from Aug 2022, so their might be some more performance enhancements that Jim has done since. - I made sure there was *no* ISC control going to the SRM during my measurement (such that the comparison is fair). Here's the ISI control configuration: - (Of course), both chambers have the standard, blended GS-13 inertial sensor + CPS displacement sensor informed, feedback - Both chambers are being feed the same CPS sensor correction signal from the ITMY (biergarten) corner-station computed by SEI proc. - HAM5 has all feed-forward on in all 6 CART DOFs, HAM7 only has CART X, Y, Z. I also draw several different / new conclusions and show more plots: - With SRM's EUL L displacement ASD completely dominated by ISI CART RX tilt motion -- and in FC1's EUL L displacement ASD, the ISI CART RX tilt contribution is much lower; comparable to the ISI CART Y displacement -- I'm reminded again at how much an improvement that installing fine vertical capacitive position sensors, or CPS, yields. As the gospel math (T1300645, eq. 9) shows, for these high-bandwidth feedback loops, the ground noise suppression is only as good as how quickly you can roll off your CPS displacement sensor noise from the blend of the GS13s and CPS. That CPS noise dominates the RX loops, and the RX loop is informed by differential vertical sensors -- the CPS. This residual RX noise couples both as noise for the ISI CART Y feedback loop, but also because SRM is not centered on the table and is ~ 1 meter tall, couples directly into EUL L motion at the suspension point. It's that later effect that gets us. I do wonder, though, if the RX blend filters could be improved though. - I show the other EUL T, EUL V, EUL R, EUL P, and EUL Y in the attached comments, and will comment accordingly there. These are mostly so I can create a model of all these DOFs as they contribute down the suspension chain, but they're also useful to see, in general, and we often forget about them for brevity. - I also show the linear transfer function between the HAM5 GND T240 in CART X, CART Y, and CART Z to demonstrate the difference between the resonance structure of the RESS and HEPI. HAM5 / SRM vs. HAM7 / FC1 CART Y or EUL L is shown here, the rest are in the comments. Both chambers have some sort of feedfoward on, in attempt to suppress this, but there's still quite a high Q feature left over by the RESS. That the point of me modeling the transmission into the suspension noise.
Images attached to this report
Comments related to this report
Here're the EUL T, or transverse plots, mostly forced by CART X.
First and foremost -- the IFO probably / "nominally" / ideally doesn't care about transverse motion of SRM. But one could imagine a few mechanisms where it might matter (scattered light? clipping? wedge? noise in ASC that *then* couples to DARM), so we discuss it anyways, 'cause if there are easy fixes out there, then we always do the "try it and see" method. We've gotten lucky before ... *ahem* RM blade locking *ahem*.
Here, we make several more points:
- Clearly less effort has been put into improving the CART X / EUL T DOF, compared to the CART Y / EUL L DOF for SRM. I'm not throwing salt on Jim's game, he's got plenty to do, but its a useful and demonstrative exercise, when comparing the CART X and CART Y DOFs, which, ideally are the same, since the ISI is built to have X / RY symmetric with Y / RX. You can see that the performance difference is *just* the control configuration (i.e. the CART X blends are different than the CART Y).
- When comparing HAM 7 CART X / FC1 EUL T vs. HAM7 CART Y / FC1 EUL L ASDs for FC1, one can see that the CART X and CART Y contributions are roughly the same. It looks like if we copied the blend filters from FC1 CART X blend filters to HAM5 CART X, we could gain a factor of 5 between 2-4 Hz where HAM5 ISI CART X is dominating SRM EUL T, even without swaping in fine CPS sensors. But again, the IFO probably / "nominally" / ideally doesn't care about transverse motion of SRM.
- Flipping back and forth between all 4 ASD plots, you can see that HAM 7 CART X / FC1 EUL T CART X sensor correction performance is spoiled by the HAM5 ISI's coarse vertical CPS -- the CART RX noise dominates the SRM EUL T DOF around the microseism -- but this time via that "residual RX noise pollutes the Y DOF" g/w^2 mechanism. Where we get a factor of 5-10 isolation at 0.15 - 0.5 Hz in FC1 EUL T, we barely get a factor of 2-3 with SRM EUL T. That problem *might* be solved by improving the high-pass blend filter on the GS-13s in the RX DOF.
- There's not nearly as dramatic of a difference between the HAM7 RESS and HAM5 HEPI systems in transverse transmission plots. But, because the RESS resonant structure happens to line up with some noise feature in the ground at ~40 Hz, the ASD performance difference is quite dramatic between the HAM7 RESS and HAM5 HEPI between 20 and 50 Hz.
Images attached to this comment
Here're the EUL V, or vertical plots, forced by CART Z. Similar to transverse, vertical motion is rarely considered as an important DOF for noise in the IFO. But, in this case, we're wary of the RESS resonance, because it happens to land almost directly on to of the HSTS highest roll mode at ~40 Hz (see modeR3 in the ideal mathematica model, and LHO:49749 for an inventory of measured modes at H1), and the highest vertical and roll modes of the the HXDS (modeled to be around ~34 Hz and ~45 Hz respectively). The latter HXDS modes are nominal damped by eddy current damping mechanisms, but we'll see. - So, let's sit on that: compare FC1 EUL V vs. SRM EUL V ASDs. Then compare FC1 EUL V vs. SRM EUL V TFs. One can see over a factor of 100 more motion around 40 Hz "under" FC1 than at the same frequency in SRM. This is what will be useful to model in terms of transmission through the suspension. Again, Vertical and Roll aren't typically considered a noise source, but alas, it's often the degrees of freedom you for get about that end up spoiling the performance in the end. The SQZ and Filter Cavity design requirements document (T1800447) estimated the needs of the filter cavity suspensions and steering mirror estimates using 2018 HAM5 ISI data from O2 (T1800066), because that's all we had at the time, and the rigid external support structure RESS design (T1900189) wasn't finished until 2019, and the HXDS design (E2000574) wasn't finished until 2020. Now that we have this ISI data, and models of the HXDS suspensions validated with real measured systems, it'll be good to re-estimate now that we have more information. I'll be taking care of that. - Also, comparing ASDs between SRM EUL V and FC1 EUL V we again see the beautiful results that come from improving the vertical position sensors from coarse to fine. If this provides that much more motivation to go in and replace these sensors, as per discussion in July 2022 (see G2201005 on upgrades to be put in the 2024-2028 cooperative agreement, if not sooner), then here it is! It's also interesting to see that the RY DOF contributes roughly equally to EUL V for both SRM and FC1, regardless of coarse or fine CPS between 0.5 and 1 Hz. I wonder if another blend filter tweak is in order here.
Images attached to this comment
Here, just because I'm getting tired, here's EUL R, P, Y aka Roll Pitch and Yaw in the same entry. Here, there's a lot less to say, since the Euler Basis DOF is dominated by, if not directly proportional to the obvious CART Basis DOF.
- Comparing the four EUL R and EUL P for both suspensions (which are primarily comprised of RX and RY, respectively) it's clear that:
- The improvement with the HAM7 ISI's CPS helps make factors of 5-ish gains over a huge frequency region from 0.5 to 5 Hz, where these DOFs are dominated by how fast we can roll off the CPS blends.
- The performance for each R and P for a *given* suspension / ISI system is about the same, as expected, since we expect RX and RY to perform roughly the same.
- There is similar worsening of the FC1 EUL P performance between 30-40 Hz because of the RESS. There is *some* modeled SUSPOINT Pitch to OPTIC Vertical coupling but it's tiny. Of course, in reality, it'll be much worse than tin, but hopefully still small.
- Comparing the EUL Y DOFs for both suspensions show they're very similar. The only difference being the RESS vs. HEPI structure between 30-40 Hz.
Images attached to this comment
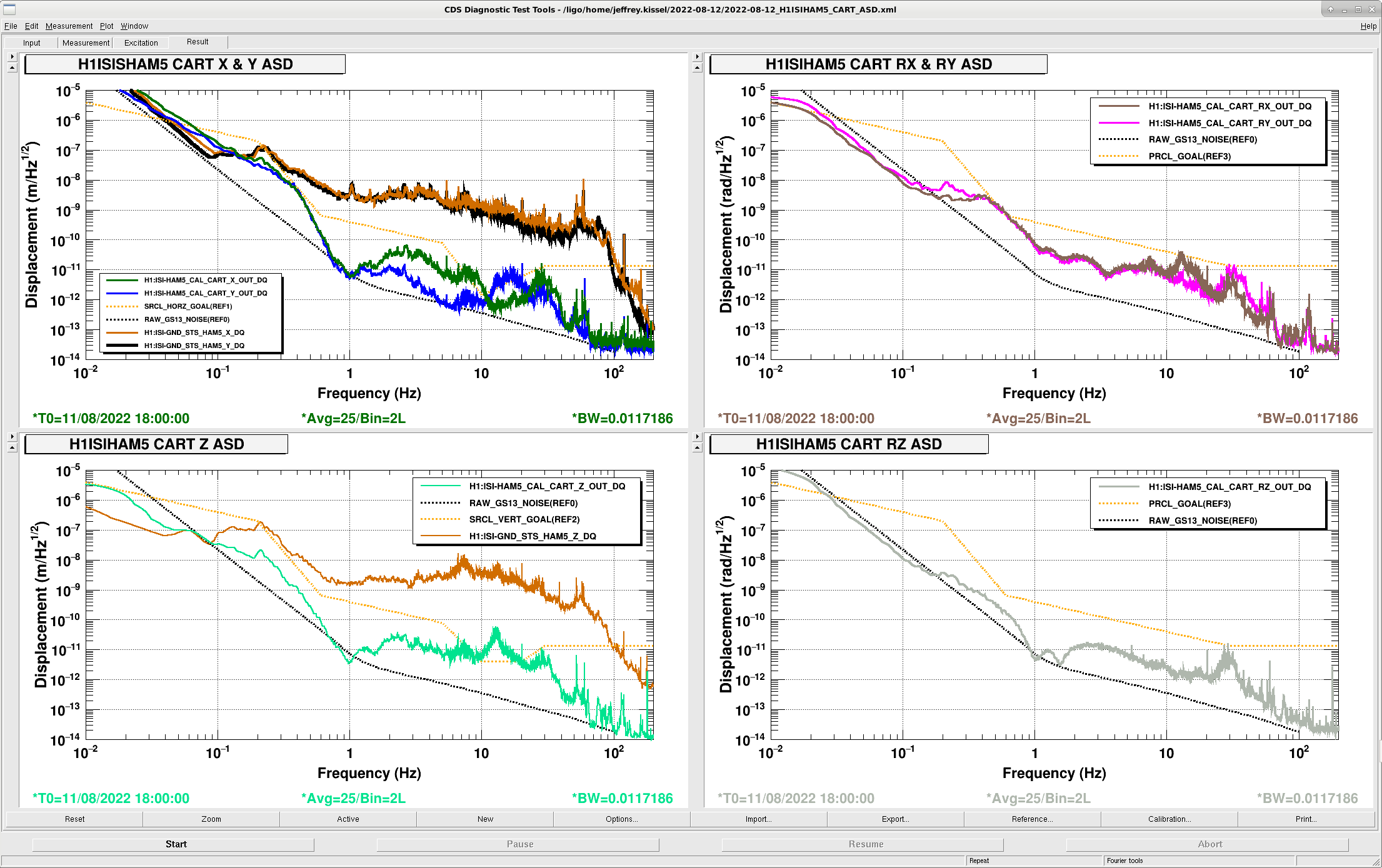
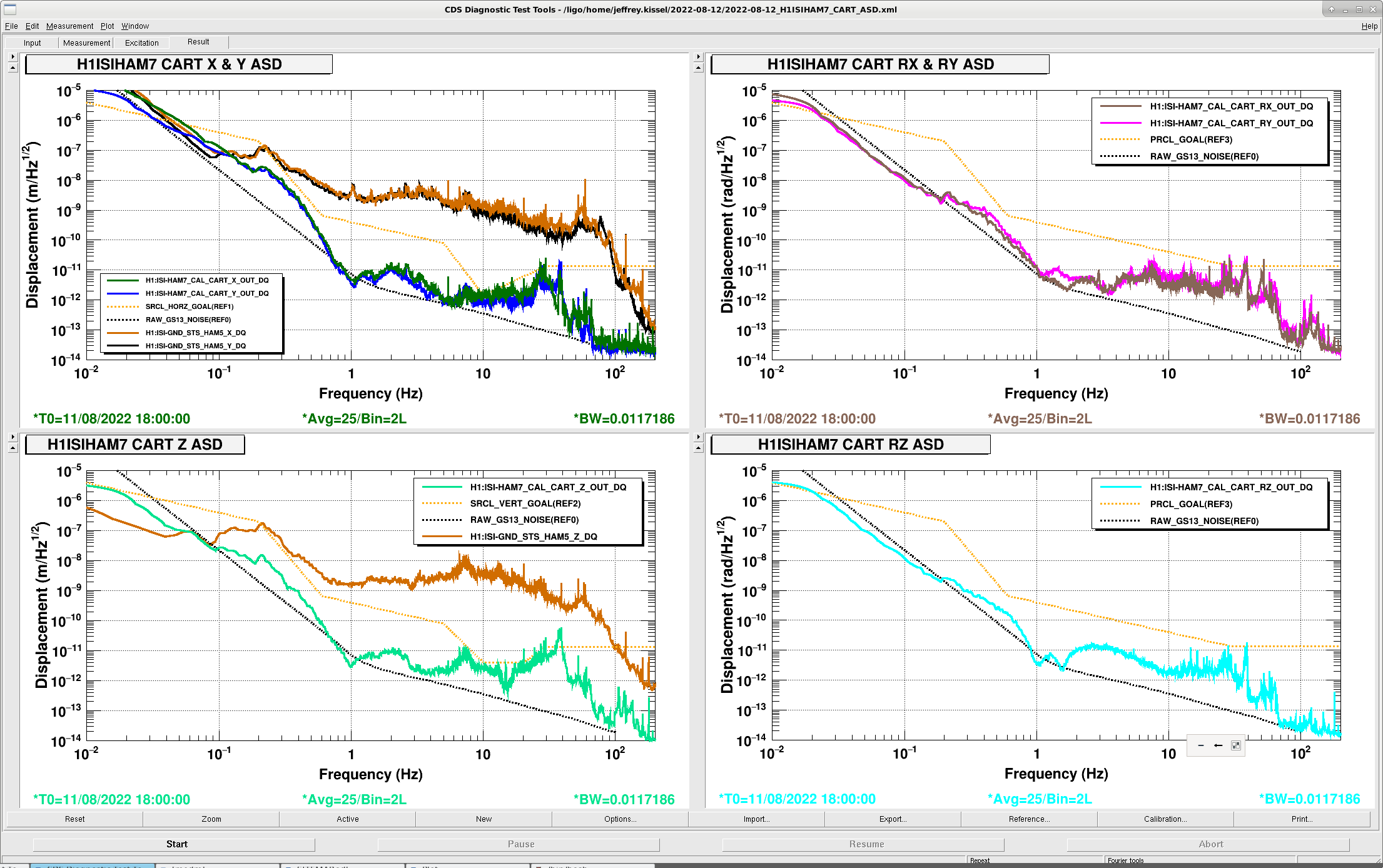
Just because we wish to broadcast the noise from these two different ISI to other suspensions, I attach here the "raw" (but calibrated) ISI-basis Cartesian performance of the two chambers, HAM5 and HAM7. I'll be using these traces to update the seismic input model for all the SUS damping loop noise budgets, which can be found (for better or worse) here: /ligo/svncommon/SeiSVN/seismic/HAM-ISI/Common/HAM_ISI_Model/LentickleAligo_Model/SeismicIsolation/seisHAM.m
Images attached to this comment