Very good isolation results were presented in aLOG Sensor Correction Results. During the test, the ISI was the only controlled system. The ISI is locked at DC to stage 0 but the HEPI structure (stage 0) can still wander around since HEPI is not controlled.
HEPI position control:
Since isolation performances of the HEPI are limited (amplification of the motion around the blend frequency and the HEPI sensor correction is not as good as the ISI one), it seems attractive to implement a simple position control to lock HEPI to the ground and steer the whole HEPI-ISI as desired.
In this case, the HEPI-L4C inputs of the super sensors are turned off (via zero gain filters for convenience) and no filters applied to the IPSs.
Then, some rudimentary isolation loops (couple of poles and zeros) were designed such that the UGF is 100mHz. This low UGF allows not changing the HEPI dynamics in the ISI control bandwidth (Low gain peaking between 100mHz and 30Hz).
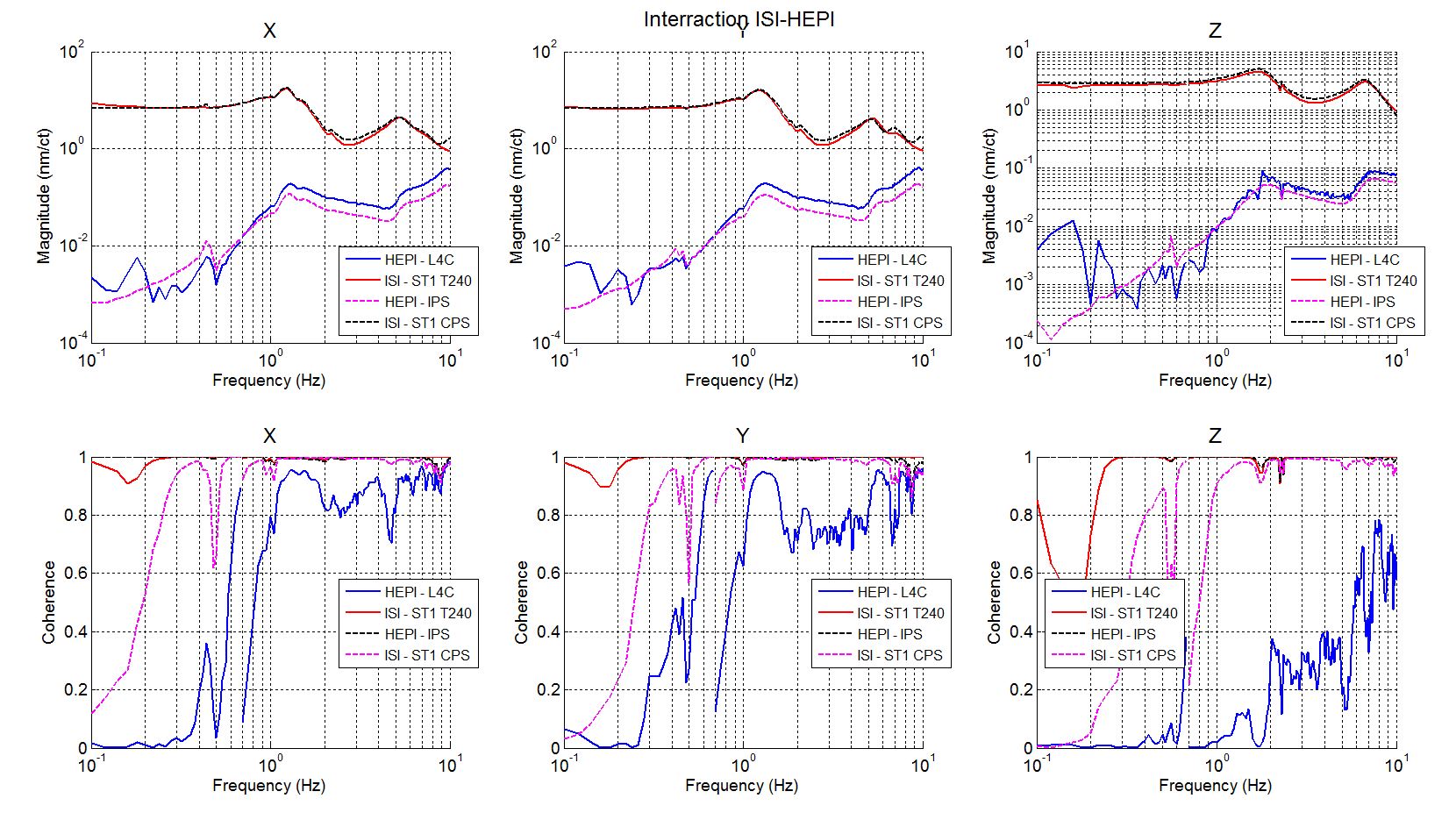
At low frequency, when no control is engaged, the ground, the HEPI and the ISI are moving together. With the sensor correction, the CPS signals are added to STS-2 signal to evaluate the inertial motion of stage 1. But when the stage 1 of the ISI is driven, HEPI-stage 0 also moves (cf aLOG Feedforward and figure transfer functions from ISI to HEPI in attachment – H1_ISI_ETMY_Interraction_HEPI_ISI_20130530.jpg). Consequently, the stage 1 inertial motion is misevaluated since HEPI motion is not considered.
By increasing the UGF of the position control on HEPI, the HEPI piers and stage 0 are locked together and the stage 1 inertial motion evaluation should be better.
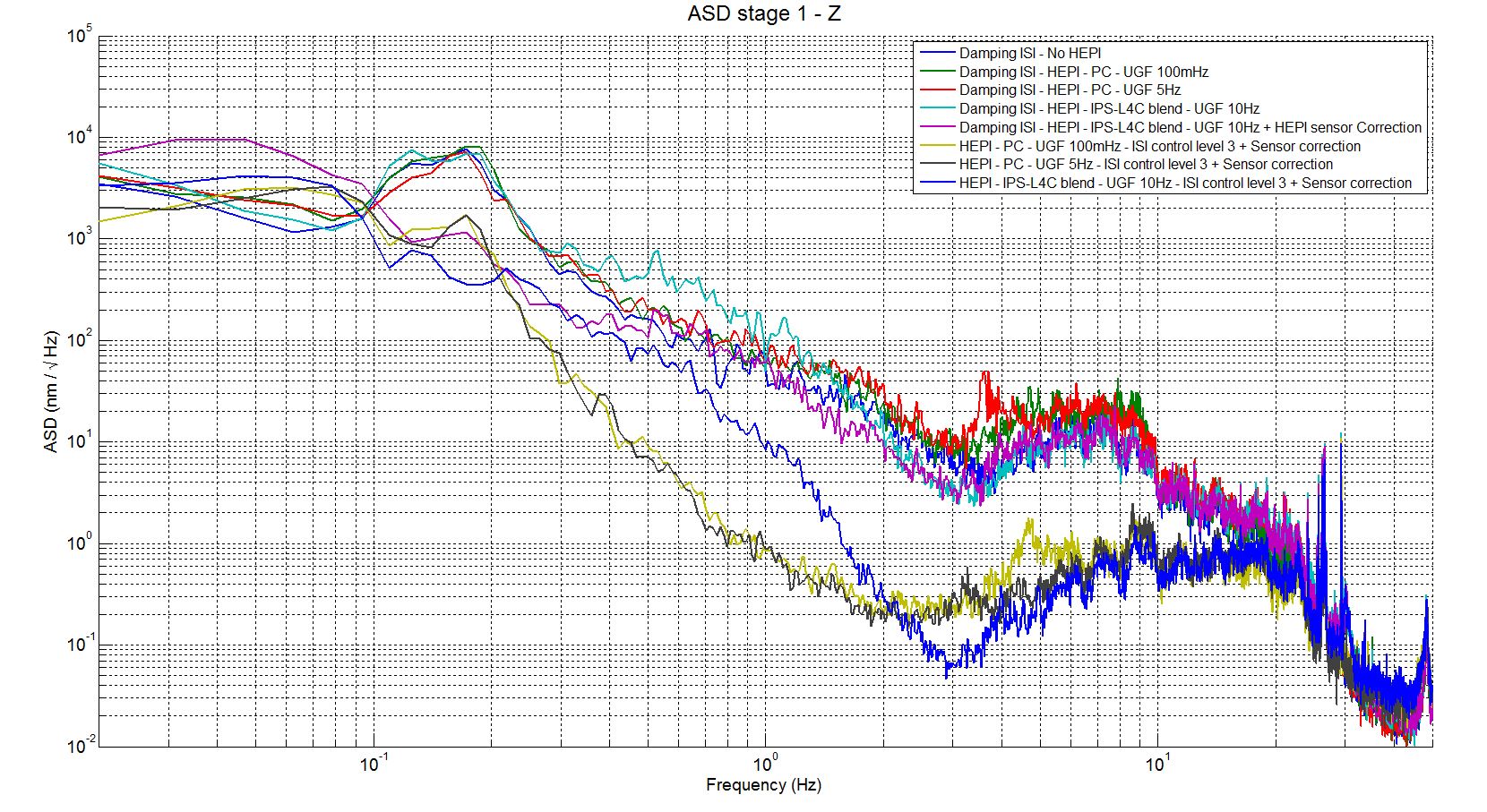
In attachment H1_ISI_ETMY_ASD_Stage_1_Z_Different_Configuration_20130522.jpg , spectra of stage 1 motion in the Z direction are presented in different configurations:
- ISI controlled + No HEPI control
- ISI controlled (with sensor correction on stage 2) + HEPI control (UGF 10Hz - super sensor IPS +L4C + Sensor correction)
- ISI controlled (with sensor correction on stage 1&2) + HEPI control (Position control – UGF 100mHz)
- ISI controlled (with sensor correction on stage 1&2) + HEPI control (Position control – UGF 5Hz)
It seems that controlling the HEPI using a “pure position control” doesn’t improve or deteriorate the isolation performance of the ISI (vs no HEPI control) but it’s simpler to implement than the regular L4C-IPS blend.
Isolation is better when the sensor correction is implemented via the stage 1 of the ISI. Increasing the UGF of the position control from 100mHz to 5Hz doesn’t seem to improve the isolation of the ISI.
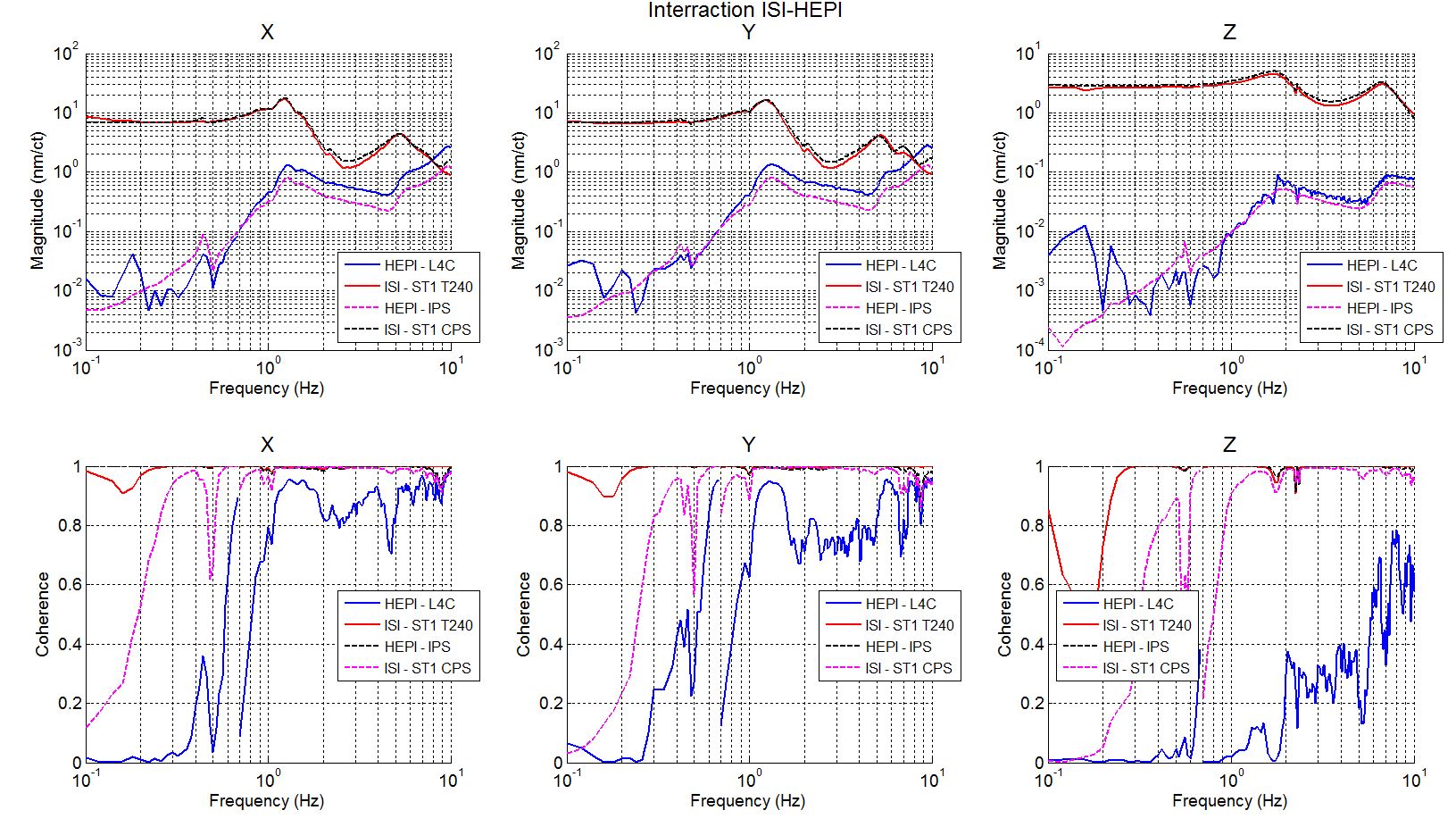
After reviewing the results, I found a calibration issue in the HEPI L4C in the X and Y directions. The couplings are actually lower than initialy presented. It explains why controlling the HEPI in position with a 5Hz UGF vs 100mHz doesn't seem to affect the sensor correction (Ground to stage 1 of the BSC-ISI).