Dan, Evan
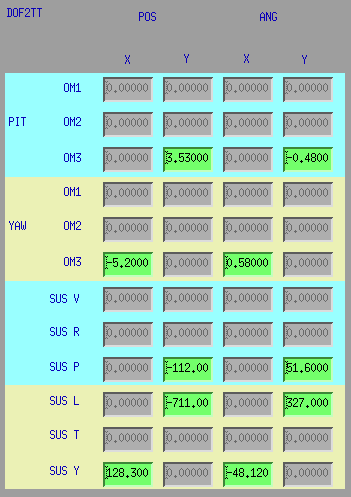
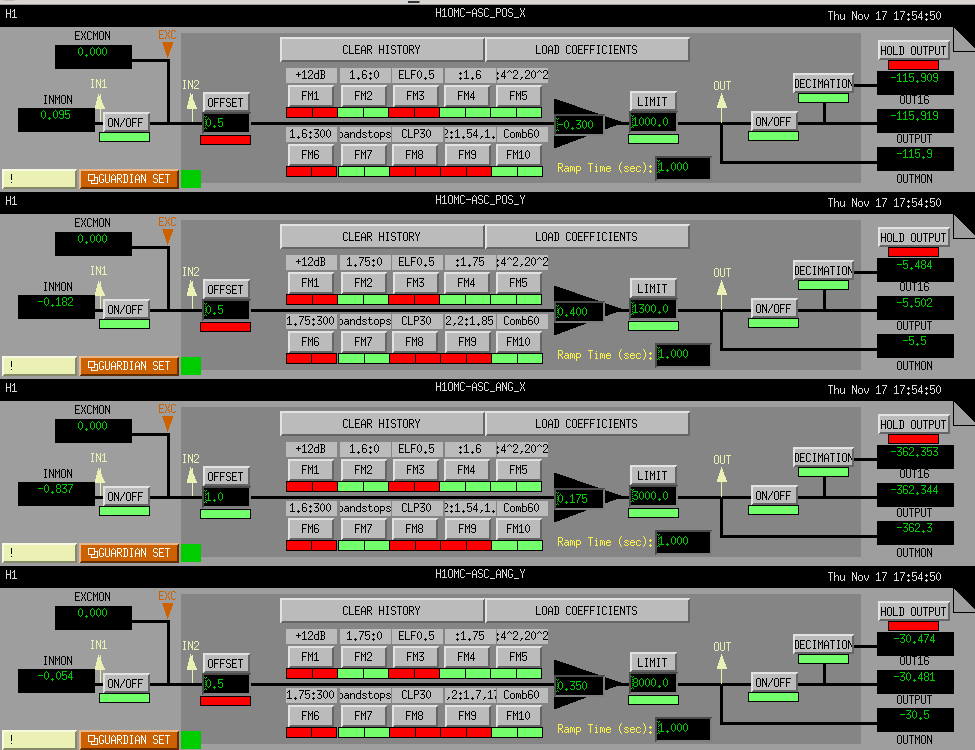
We examined the OMC angular control scheme and found several features that puzzled us. The four control banks POS X, POS Y, ANG X, ANG Y currently contain plant inversion, even though (1) the loops actuate on disparate suspensions (OM3 and OMC, see attachment), so it's not clear which suspension is being inverted here, (2) the loops are meant to be slow (~0.1 Hz bandwidth), so suspension inversion seems unnecessary here, and (3) all 4 loop shapes are different (in particular, ANG X is missing some broad notch feature around 1 Hz that is present in the other three).
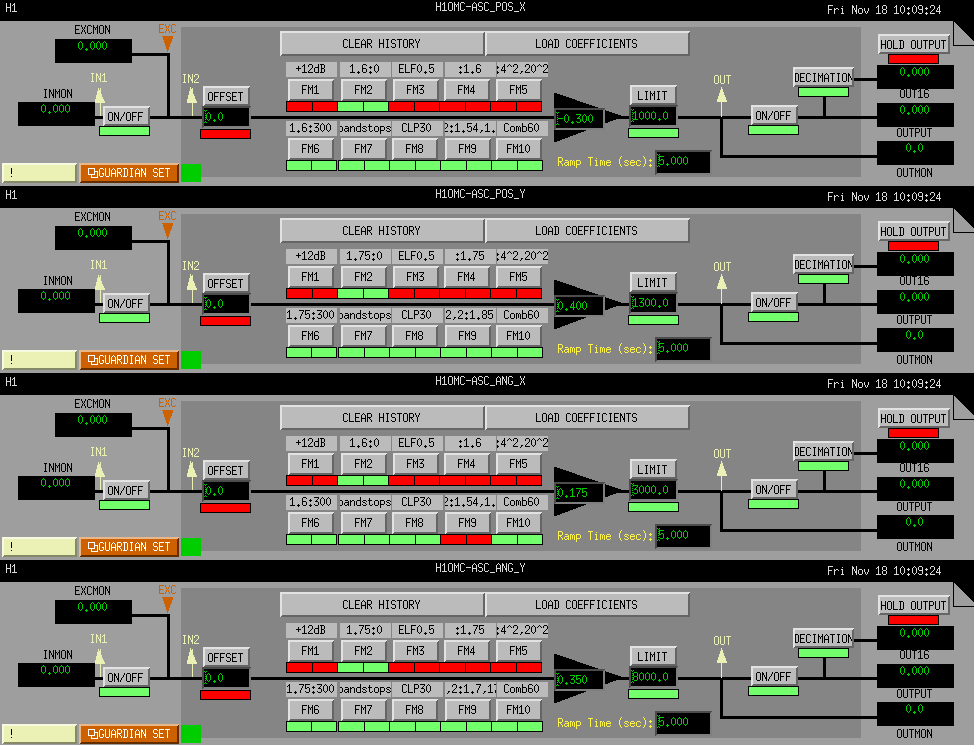
We compared this with the Livingston scheme, which is basically a simple integrator with rolloff kicking in around 4 Hz. We decided to copy this control and try it out at 2 W and it seems to work fine. Attachments show the current filters versus the new filters. Note that we did not alter the loop gains and they are probably not equal to the Livingston loop gains. The pdf attachment shows a comparison of the current, new, and Livingston control filters.
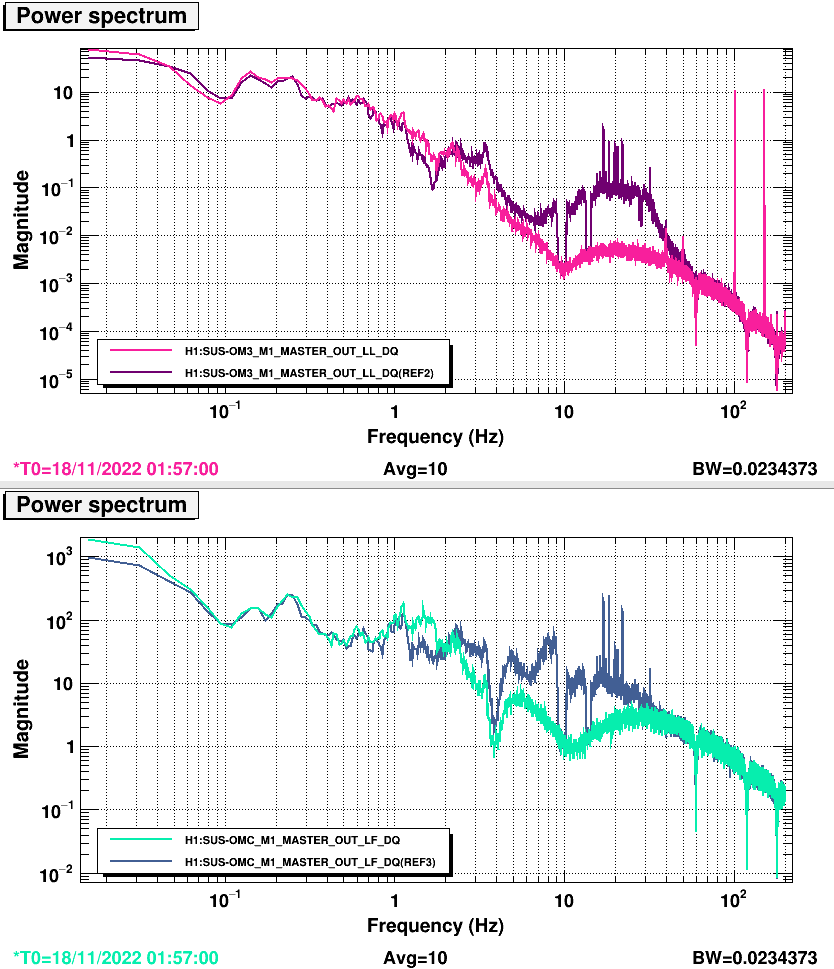
The drives to OM3 and the OMC suspensions are reduced from 3 to 30 Hz (attachment).
We did step responses in the loops and found time constants of about 10 s for POS X, 20 s for POS Y, 30 s for ANG X, and 15 s for ANG Y. We were reminded that stepping POS X created a large, slow response in ANG X. We looked into changing the QPD sensing matrix to get rid of this cross coupling but found that other QPD combinations were very noisy (i.e., the current input values to make ANG X are cancelling some large motion). We decided it was probably not worth trying to mess with the QPD sensing matrix too much and to instead spend time on commissioning dither.
We did not put any of this in the guardian or SDF but suggest that it be done whenever is convenient.

We locked and powered up fine with these filters, so they have been accepted into SDF.