craig.cahillane@LIGO.ORG - posted 18:52, Friday 27 January 2023 - last comment - 11:58, Monday 30 January 2023(67066)
Switching TMS SERVOS from QPD B to QPD A caused ASC ringup at 0.42 Hz
In what we expected to be a low-key test of the DC pointing out of the arms, I switched the TMS_SERVOS guardian to be centered not on QPD B but QPD A.
This was not low-key, as it caused a very slow 0.42 Hz ringup which eventually caused a lockloss.
We suspected it should not be a major change because when QPD B is centered, it looks at though QPD A is fairly close to center.
However, after switching, the TMS moved by more than expected, maybe because the alignment onto the QPDs is relatively uncertain.
Arm Trans QPD error signal quality
I am curious about the quality of our QPD alignment error signals, which inform our SOFT loops.
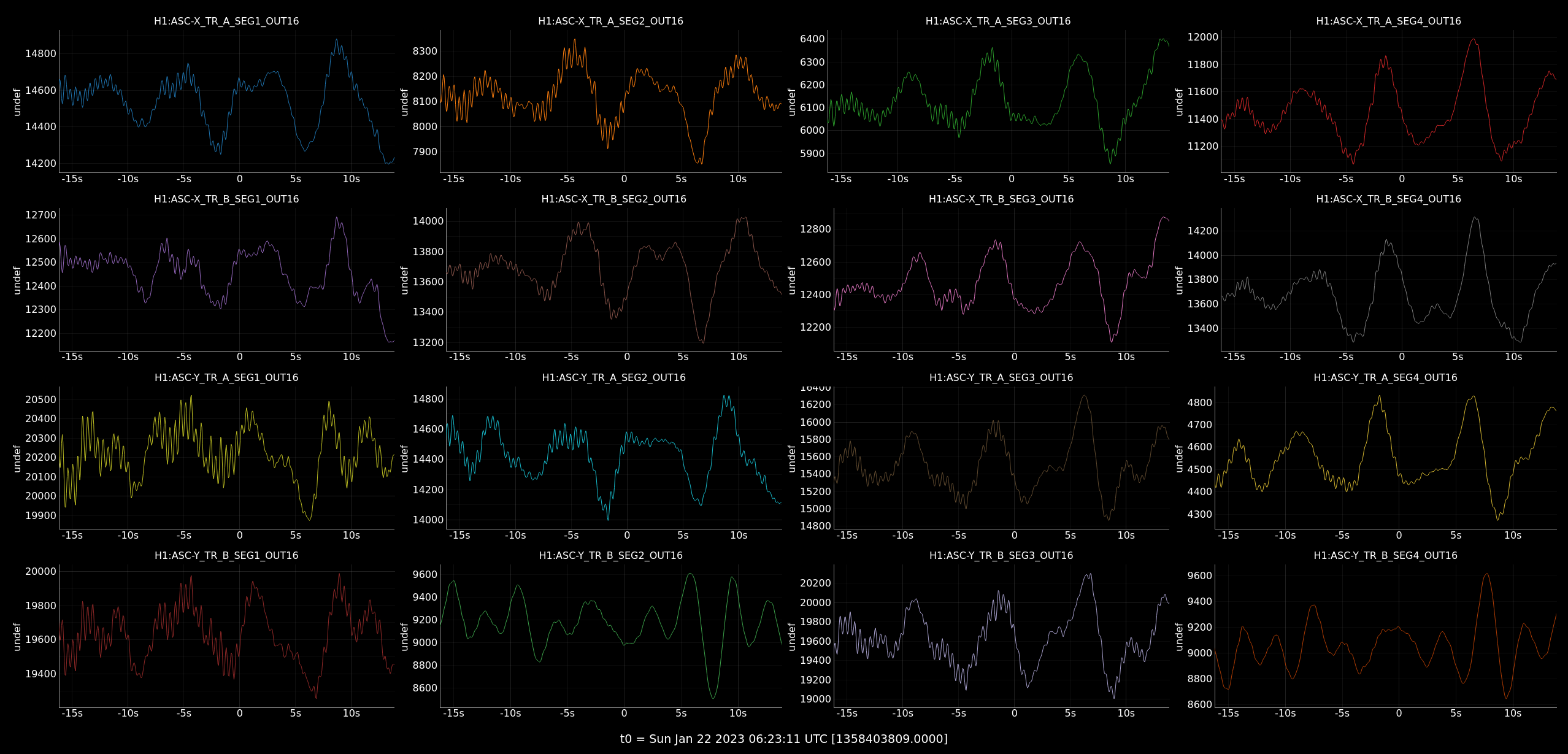
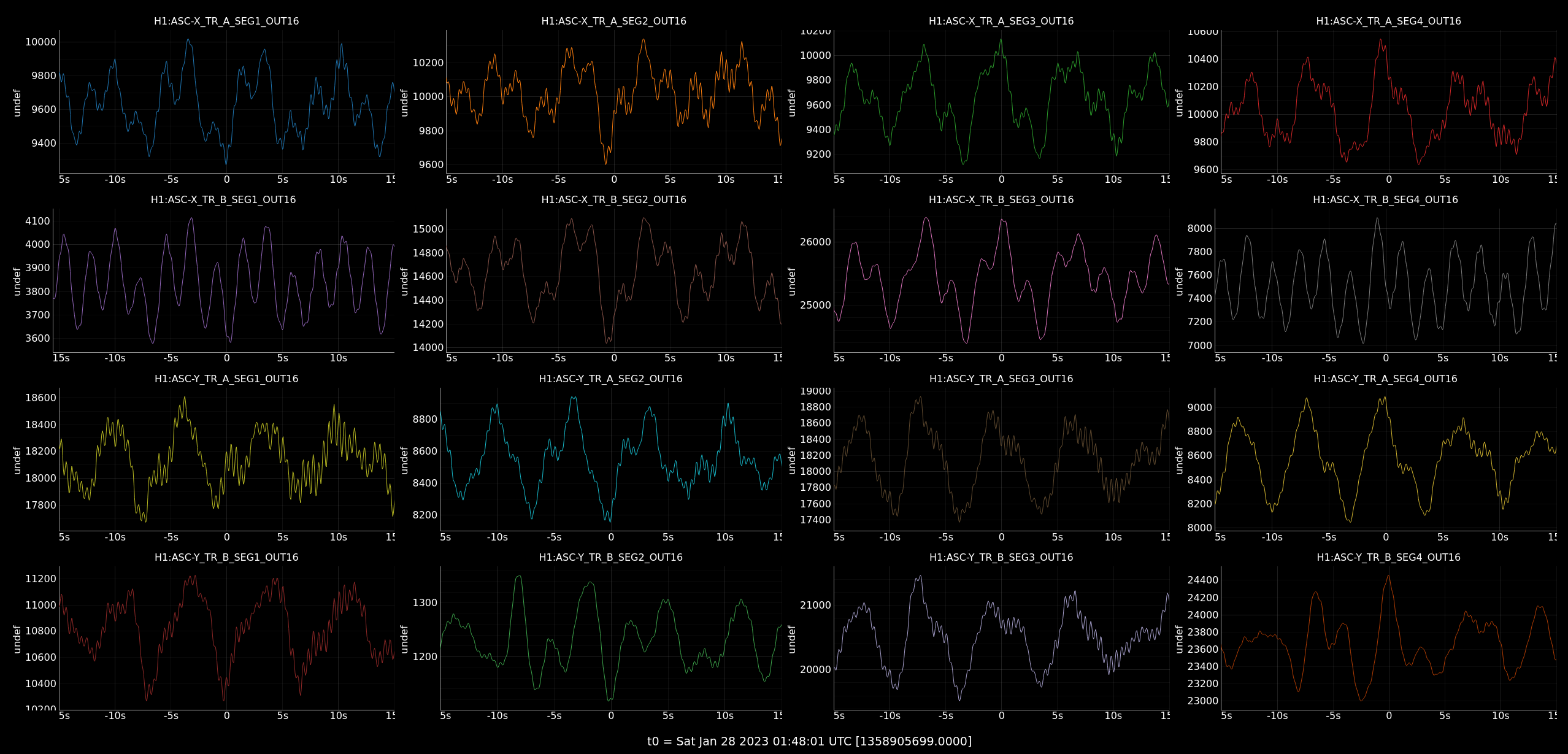
When we are centered on QPD A, only the ASC X TR A is reasonably balanced between segments, with around 10k cts on each segment (plot 4).
All others, including Y TR A, which was supposed to be centered upon, is horribly pringled.
It seems that the quality of our arm trans QPDs is impacting our stablity at the moment.
Sheila reminds us of the O3 investigations by Keita into the apparent "reversal" of the pitch and yaw error signals on TMS Y.
Elenna measured larger pitch motion in some QPDs when exciting yaw.
Plot 1 shows the frequency content in the Arm Trans NSUMs right before lockloss.
You can bring up this plot in the control room by running
quick_psd H1:ASC-*_TR_*NSUM*OUT_DQ -t1 1358905699 -d 300 -b 0.01
There are loads of peaks in each of these, including 0.14 Hz, 0.44 Hz, 0.88 Hz, 1.02 Hz, and 2.18 Hz.
Improvement to TMS_SERVOS guardian
Before today, the TMS_SERVOS guardian worked by zeroing the TEST OFFSET with a 30 second TRAMP for pitch and yaw, then turning on a servo to move the TMS to center the beam on QPD B.
This tended to produce an ASC kick if you turned off TMS_SERVOS.
TMS_SERVOS has been fixed and loaded so it does not zero the offset if the offset is already on.
It also will not wait 30 seconds for the offset to be zeroed, so it should be much faster.
Finally, I have reverted so TMS_SERVOS will align to QPD B again.
Images attached to this report
Comments related to this report
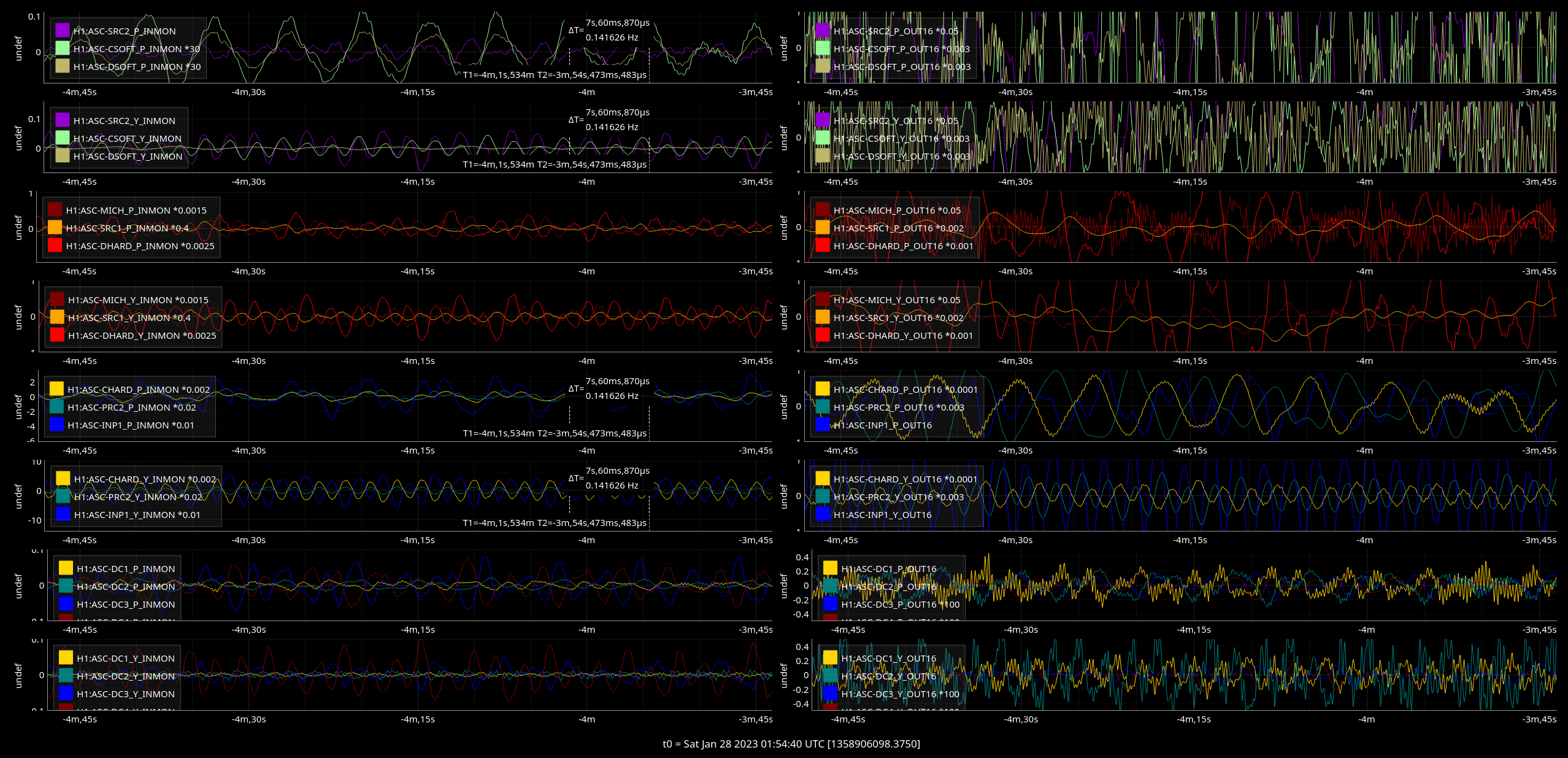
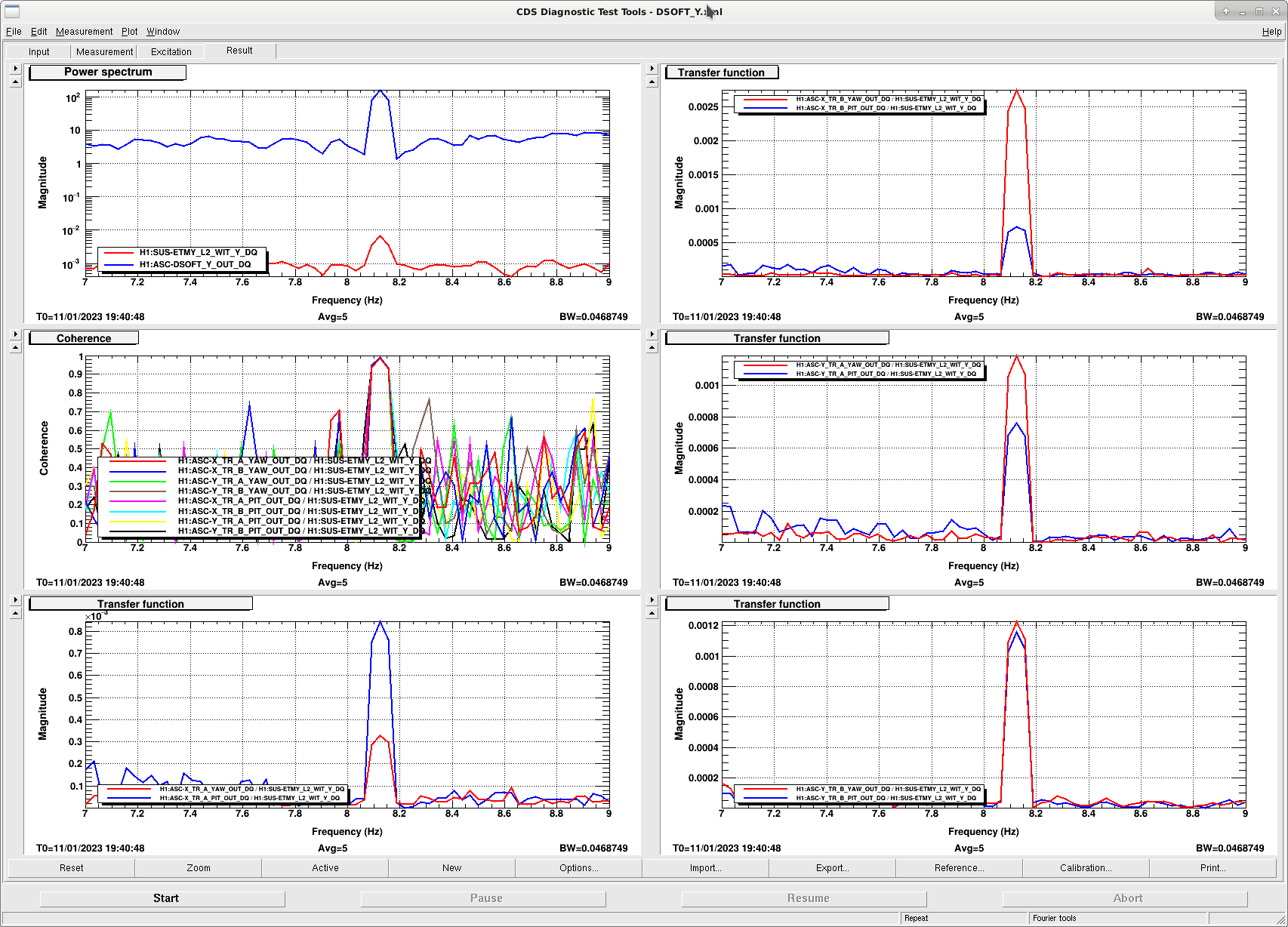
I won't burden this alog with all of the measurements I made, but I recently made measurements of the TMS QPDs sensing matrix with the centering servo engaged. The screenshot I have attached is the results from a DSOFT Y excitation. There are plots of all four QPD transfer functions in pitch and yaw for the DSOFT Y excitation. For two QPDs (TRX B and TRY A) you see some pitch signal (blue) relative to the yaw signal (red). However TRX A and TRY B show a very concerning result where the pitch signal is nearly equivalent to, or greater than, the yaw signal.
This behavior was evident for every arm ASC excitation I made.
Images attached to this comment
For reference: Jenne tested the Y-arm QPDs in April 2021, and found that moving the TMS produced sensible results, but moving the Y-arm cavity axis did not: alog 58744. Additionally, they checked the signal chains and were able to get similar responses in each segment by aligning onto each one in turn with the Y-arm locked alone. At this point, we were using the trans QPDs to blend CHARD. Now we use them for the SOFT loops. For reference, I have attached the counts on all four segments on each arm trans QPD when we are aligned to QPD B, the nominal state. Here we see the QPD XB is better balanced (although still slightly pringled). However, QPD YB is still very badly pringled. Pringling is bad because it senses pitch motion directly as yaw motion, and vise versa. EDIT: Keita has given us some wisdom on the state of the Y-arm QPDs. It's possible that the beam on the TMSY is astigmatic (pringle is not a correct term for QPD sensing), and the segments are telling us the truth about how much power is incident upon them. Additionally, moving the TMS and Y-arm cavity axis gives a different gouy phase response between the two QPDs, which means we may have needed to think more carefully about changing which QPDs we align to on the TMS. Finally, moving the cavity axis alignment can create a rotation in the astigmatic beam, making it very difficult to understand pitch and yaw sensing on the TMSY QPDs.
Images attached to this comment