The feedforward control is used as a complement of the feedback control mainly to reduce the motion around 10Hz (created by the HEPI piers). The L4Cs installed in the HEPI boots are used to feed the stage 1 actuators.
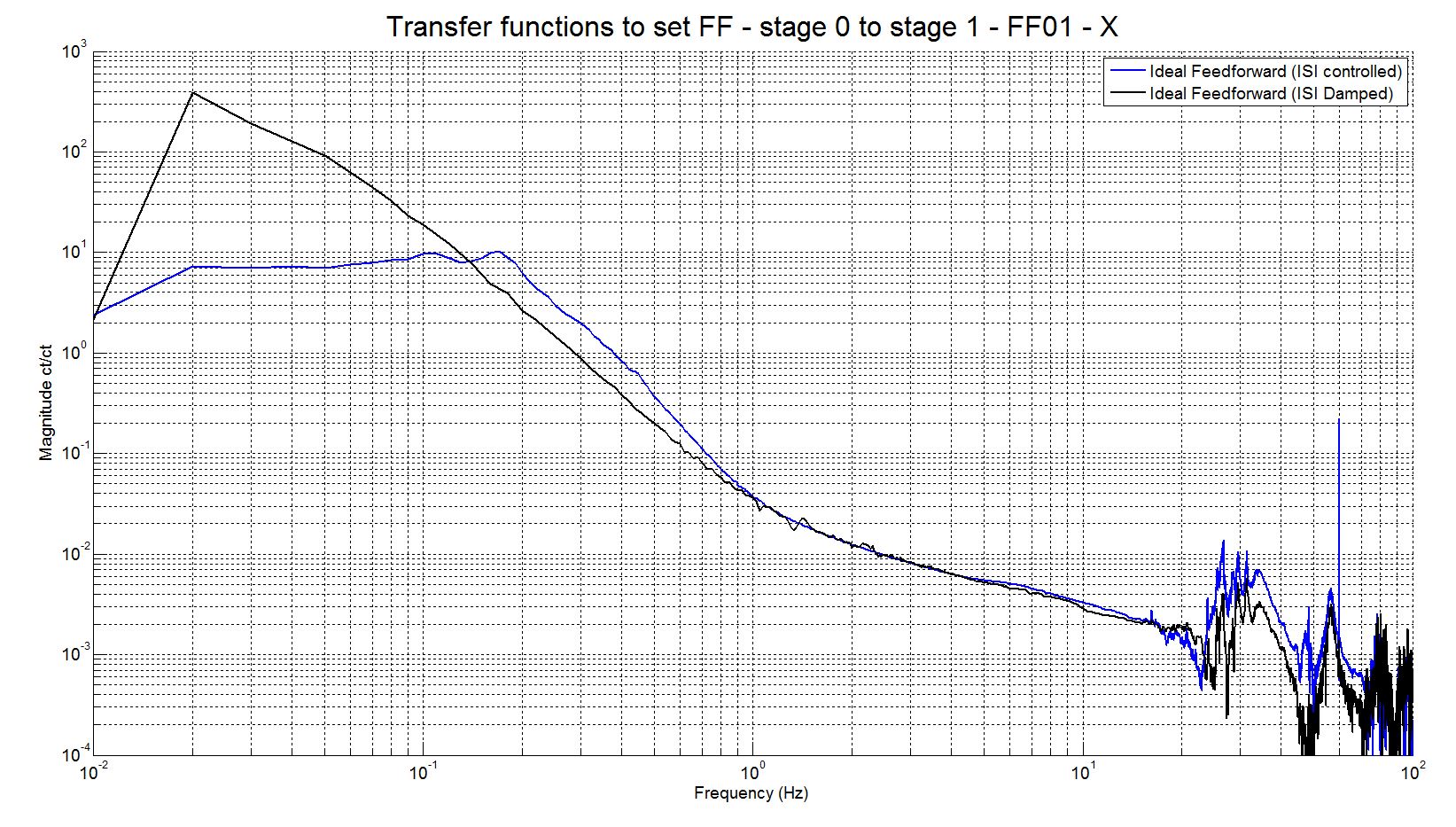
In https://alog.ligo-wa.caltech.edu/aLOG/index.php?callRep=6768, the feedforward filters were set-up using transfer functions measured while the ISI was damped. I evaluated how the ideal feedforward filters would change if the ISI was “feedback controlled”. I compared the ideal feedforward filters obtained in the two configurations: Damped vs feedback controlled (attachment shows the feedforward filter for the X direction).
Above 1Hz (super sensor dominated by the inertial sensor), the two filters are almost identical. The ground path and the force path are modified in the same manner by the feedback control.
Regarding these results, it doesn’t seem essential to measure transfer functions with the ISI “feedback controlled” to set the feedforward controllers.