I have calibrated the CHARD and DHARD in-loop error signals using the L2 witness and L3 oplevs.
I use a similar method to obtain the calibration that I have used in calculating the REFL sensing matrix. I turn on notches in all ASC loops at 8.125 Hz, so I don't have to consider loop effects. I inject into CHARD/DHARD at the "SM" injection point at 8.125 Hz (3000 exc counts). I obtain the transfer function from a test mass, such as ETMY L2 wit to the sensor, such as REFL A RF9 I (10 averages, coherence ~0.99). This gives me a result in WFS cts/ microradian of L2 motion. I have previously measured (and modeled) the L2 wit microradian to L3 oplev microradian transfer function, and I use that to convert from L2 urad to L3 urad (73 uradL2/uradL3 pitch, 45 uradL2/uradL3 yaw). These signals are also normalized by PSL input power (76W for these measurements). The DHARD signal is purely AS A RF45 Q, whereas the CHARD signals are a weighted sum of all four REFL I signals (see CHARD input matrix for values).
DHARD P = 4.2e-11 rad/ct
CHARD P cal = 8.8e-11 rad/ct
DHARD Y cal = 5.2e-11 rad/ct
CHARD Y cal = 4e-11 rad/ct
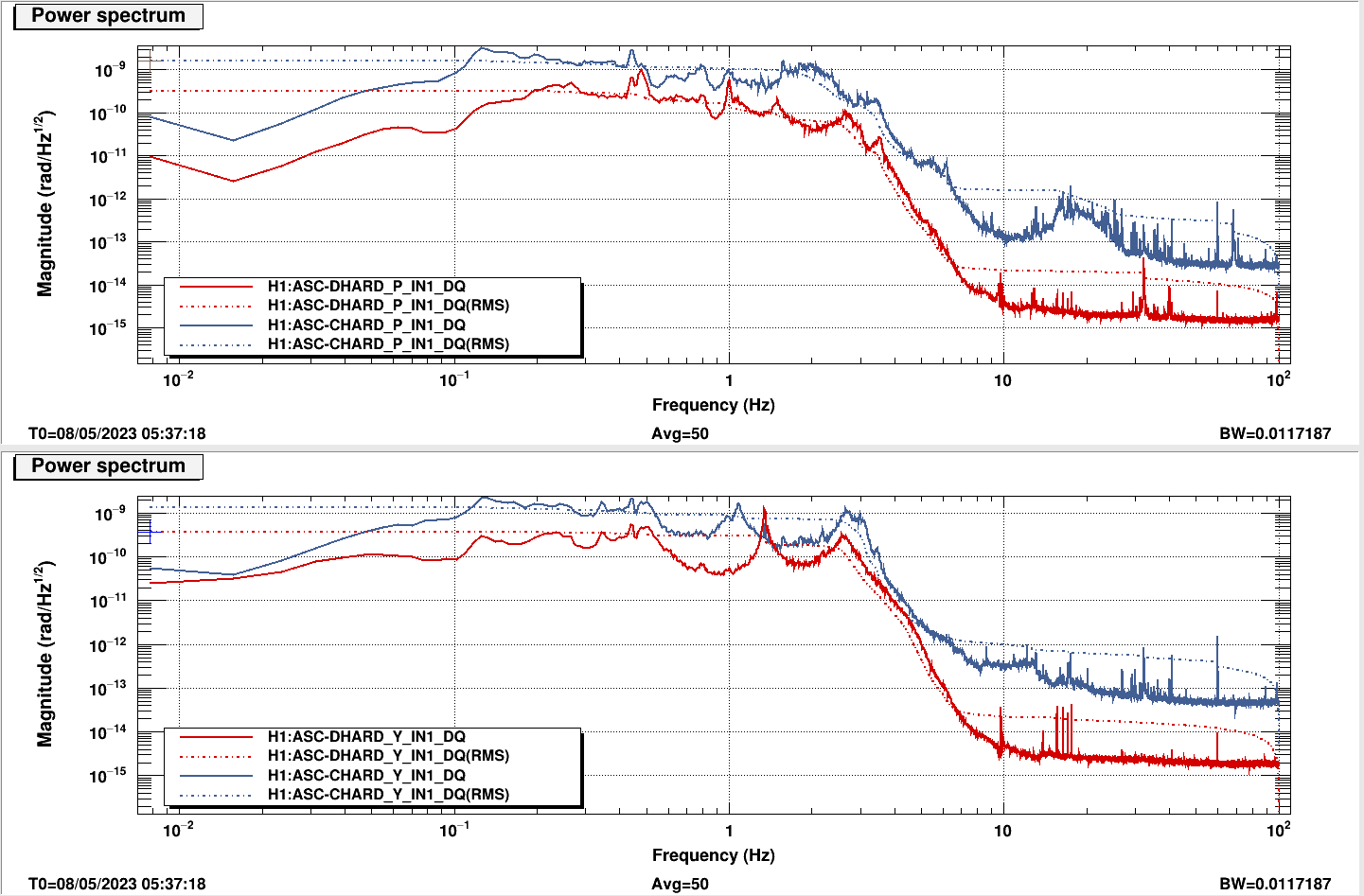
The resulting in-loop RMS for each HARD loop are as follows: DHARD P 0.32 nrad, CHARD P 1.6 nrad, DHARD Y 0.36 nrad, CHARD Y 1.3 nrad.
These results are similar to values Marie Kasprzack estimated for Livingston ASC in 2021 (see slides 6 and 7 of G2100751). However, they are very different from values that Rana estimated recently at LLO using a much different method, see LLO:64562.
Rana’s method calibrated the WFS with respect to the cavity axis angle, while this method is with respect to the angle of a test mass. Since the g factor of the arm cavity is close to 1, the former is much larger than the latter.