jeffrey.kissel@LIGO.ORG - posted 16:10, Tuesday 06 June 2023 (70197)
Measured Updates to PR3 Sliders, M3 OSEMs, and Optical Lever P and Y Using ~4km Lever Arm to ETMX ACB Baffle PDs
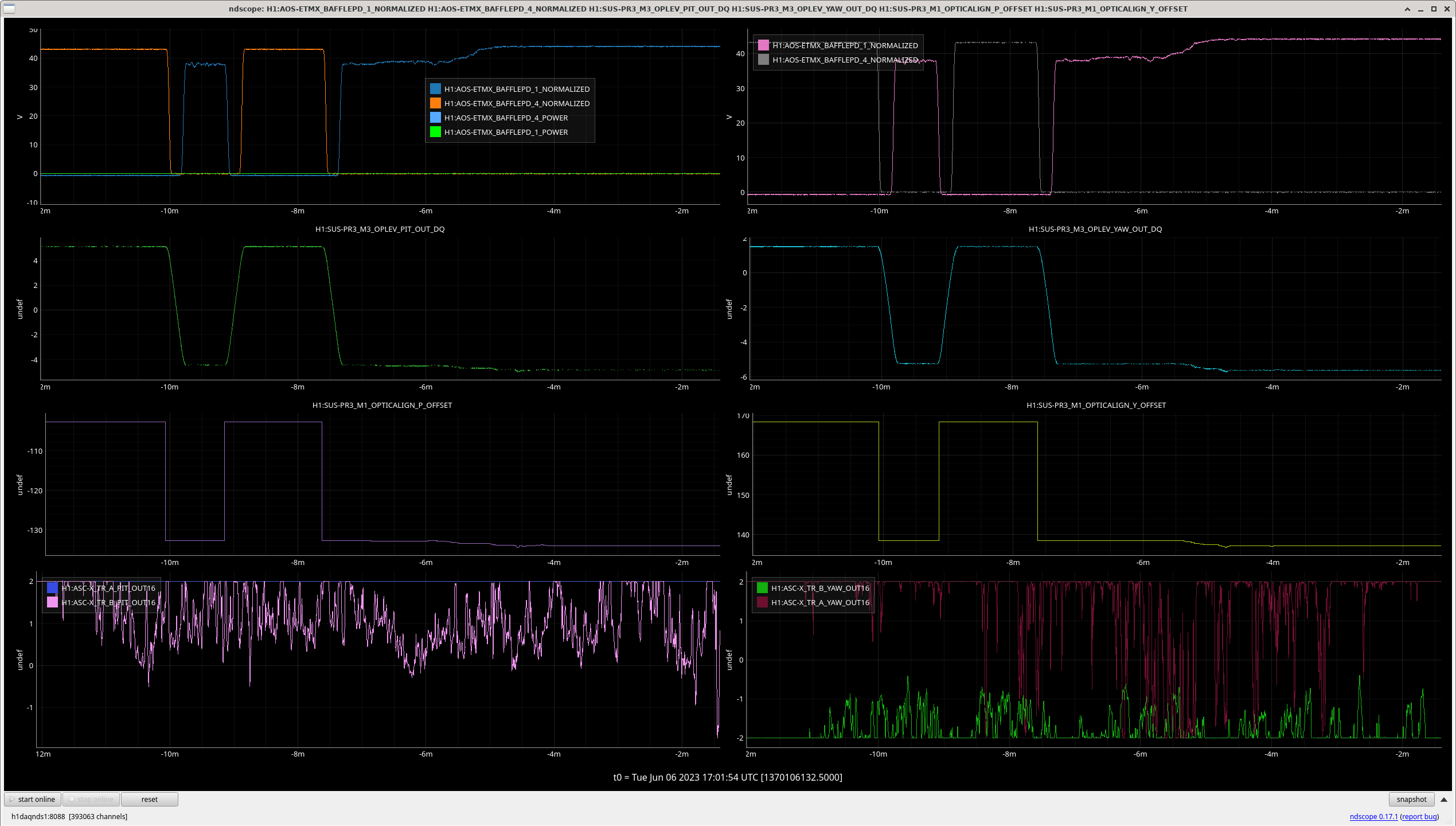
J. Driggers, J. Kissel, J. Oberling, T. Shaffer Executive Summary: We have used the ~4km arm length as a lever arm across the ~40 cm separation between ETMX ACB Baffle PDs to calibrate pitch and yaw of PR3's optic as reported by the PR3 M1 alignment sliders, M3 OSEMs, and Optical Lever pitch and yaw calibrations. They we *all* inconsistent. M1 Slider calibration changes by a factor of ~2, M3 OSEMs calibration changes by ~4, and optical lever calibration changes by a factor of ~8. We indicate the suggested correction to the calibration in the table below. We've not installed any changes, yet. We're waiting for folks to absorb and review this content, and to get ready for the change. Method (detailed blow-by-blow in 2023-06-06_OpticalLeverAlignmentCalibration.txt): (1) After the lock loss this morning, we went straight into using the INIT_ALIGN guardian to lock the X arm on read, and run the INPUT_ALIGN state. With PRM misaligned, this ensures that the PSL input beam is well aligned to the X ARM using POP WFS, and steers IM4 and PR2. We also checked and confirmed that the X ARM beam was well-centered the transmon QPDs. For us, the whole purpose of this was to make sure the PSL beam was steering through the center of the hole in the ETMX arm cavity baffle. (2) Took the INIT_ALIGN guardian to DOWN, and misaligned ITMX using the SUS-ITMX guardian. This then sets up a straight-shot, with no cavities, from PR3 to ETMX. (3) Unsure if we needed it, we also cranked up the PSL input power to 20 W. (4) We then slow rastered around the PR3 alignment sliders, looking for light to cross the ETMX Baffle PDs. (We confirmed PD1 and PD4 were alive by trending H1:AOS-ETMX_BAFFLEPD_1_NORMALIZED and H1:AOS-ETMX_BAFFLEPD_4_NORMALIZED, and saw that PD1 is typically saturated during nominal low noise around ~830 [ct], and PD4 is close, but still happily reading out real scattered light at ~550+/-50 [ct]. So, not knowing any better, we left them with a transimpedance of 2000 [ohm], and a whitening gain of +20 dB). (5) Finding that PSL light on both PD1 and PD4 by steering the PR3 M1 OPTICALIGN alignment sliders a mere (and symmetric!) +15 ["urad"] in pitch and yaw (PD1 in -PIT,-YAW, and PD4 in +PIT,+YAW), we record the pitch and yaw values of (a) the sliders, (b) the optical lever (c) the M3 OSEMs See attached trend of each of these things during those times. (6) Using these reported ["urad"] values, and comparing them against the physical [urad] from the center of the baffle's hole as determined by mechanical drawings of the PD separation and computing the distance from PR3 to the ETMX ACB as 4018.7135 [m] (see details in LHO:70177), we compute a correction to the calibration each of the sensors and actuators in order to reference against this highly precise (and quite accurate) angular reference. Results: POSITION: From LHO:70177 Slider Oplev M3 OSEM Time At [urad] ["urad"] ["urad"] ["urad"] Location Centered PIT 0.0 -117.7 +0.450 -482.992 Jun 06 2023 17:05:47 UTC YAW 0.0 +153.5 -1.355 +171.577 PD1 PIT -40.1 -134.0 -4.85 -493.754 Jun 06 2023 17:00:14 UTC YAW -37.2 +137.1 -5.61 +161.257 PD4 PIT +34.2 -102.7 +5.12 -474.888 Jun 06 2023 16:45:00 UTC YAW +37.2 +168.4 +1.52 +180.750 ----------------------------------------------------------------------- DISPLACEMENT (PD1 - Cent) PIT -40.1 -16.3 -5.3 -10.762 YAW -37.2 -16.4 -4.255 -10.320 (PD4 - Cent) PIT +34.2 +15.0 +4.67 +8.10 YAW +37.2 +14.9 +2.875 +9.17 (PD4 - PD1) PIT +74.3 +31.3 +9.97 +18.87 YAW +74.4 +31.3 +7.13 +19.493 ----------------------------------------------------------------------- CALIBRATION CORRECTION VALUE (PD1 - Cent) [urad/"urad"] PIT 2.4601 7.5660 3.7261 YAW 2.2683 8.7427 3.6047 (PD4 - Cent) [urad/"urad"] PIT 2.2800 7.3233 4.2222 YAW 2.4966 12.9391 4.0567 (PD4 - PD1) [urad/"urad"] PIT 2.3738 7.4524 3.9375 YAW 2.3770 10.4348 3.8168 ----------------------------------------------------------------------- CORRECTED CALIBRATION VALUE Suggested Update to Slider Calibration [(DAC ct)/"urad"] * ["urad"/urad] = ([DAC ct)/urad] PIT 2.675 * (1/2.3738) = 1.1269 H1:SUS-PR3_M1_OPTICALIGN_P_GAIN YAW 12.272 * (1/2.3770) = 5.1628 H1:SUS-PR3_M1_OPTICALIGN_Y_GAIN Suggested Update to Optical Lever Calibration ["urad"/(ADC ct)] * [urad/"urad"] = [urad/(ADC ct)] PIT 26.9 * 7.4524 = 200.47 H1:SUS-PR3_M3_OPLEV_PIT_GAIN YAW 29.6 * 10.4348 = 308.87 H1:SUS-PR3_M3_OPLEV_YAW_GAIN Discussion: (I) The slider vs. optical lever calibration correction is consistent with Sheila's suspicion that "the optical lever calibration is off by a factor of 4, based on the sliders" from LHO:70008. (II) We think the numbers derived from the the displacement between PD4 and PD1 are the most accurate numbers, so we suggest updating the sensor / actuator calibrations with these numbers (rather than the PD4-center, or PD1-center numbers). We're also confused / suspicious of the optical lever calibration correction values, given that they range from 6 to 12, where all other correction values are relatively consistent to within ~10%. We think this may be that the PR3 optical lever beam spot is close to the edge of the QPD. (III) We note that we're very suspicious of the YAW calibration correction factors for the optical levers. We think the PIT optical lever signal is very cross-coupled when driving YAW sliders, as much as ~0.5-1.0 PIT Oplev [urad] / YAW Slider [urad] (already correcting each by their respective calibration correction values list above). YAW optical lever per PIT slider is much less, around 0.04 YAW Oplev [urad] / PIT Slider [urad]. Reasons we brainstormed for this kind of cross coupling, (i) The QPD itself is clocked with respect to the beam spot's vertical / horizontal motion at the QPD (ii) The beam spot on PR3 is not centered (iii) The beam spot at the QPD has some astigmatism As a result of (II) and (III), Jason thinks it's worth it to look at the PR3 optical lever QPD in its housing on top of HAM3 on some future Tuesday. (IV) For the M3 OSEMS, there's no convenient place to re-calibrate *just* pitch and yaw, since the calibration of the OSEMs are done in the OSEM basis. However, there's the as-of-yet-unused "SENSALIGN" matrix in between the output of the OSEM2EUL basis change matrix and the H1:SUS-PR3_M3_WIT_P_DQ and H1:SUS-PR3_M3_WIT_P_DQ read-backs. So, we can replace the P and Y diagonal elements, which are currently and forever-have-been 1.0, with the CALIBRATION CORRECTION VALUES from the above table, 3.9375 for PIT and 3.8168 for YAW, caput H1:SUS-PR3_M3_SENSALIGN_2_2 3.9375 caput H1:SUS-PR3_M3_SENSALIGN_3_3 3.8168
Images attached to this report
Non-image files attached to this report
