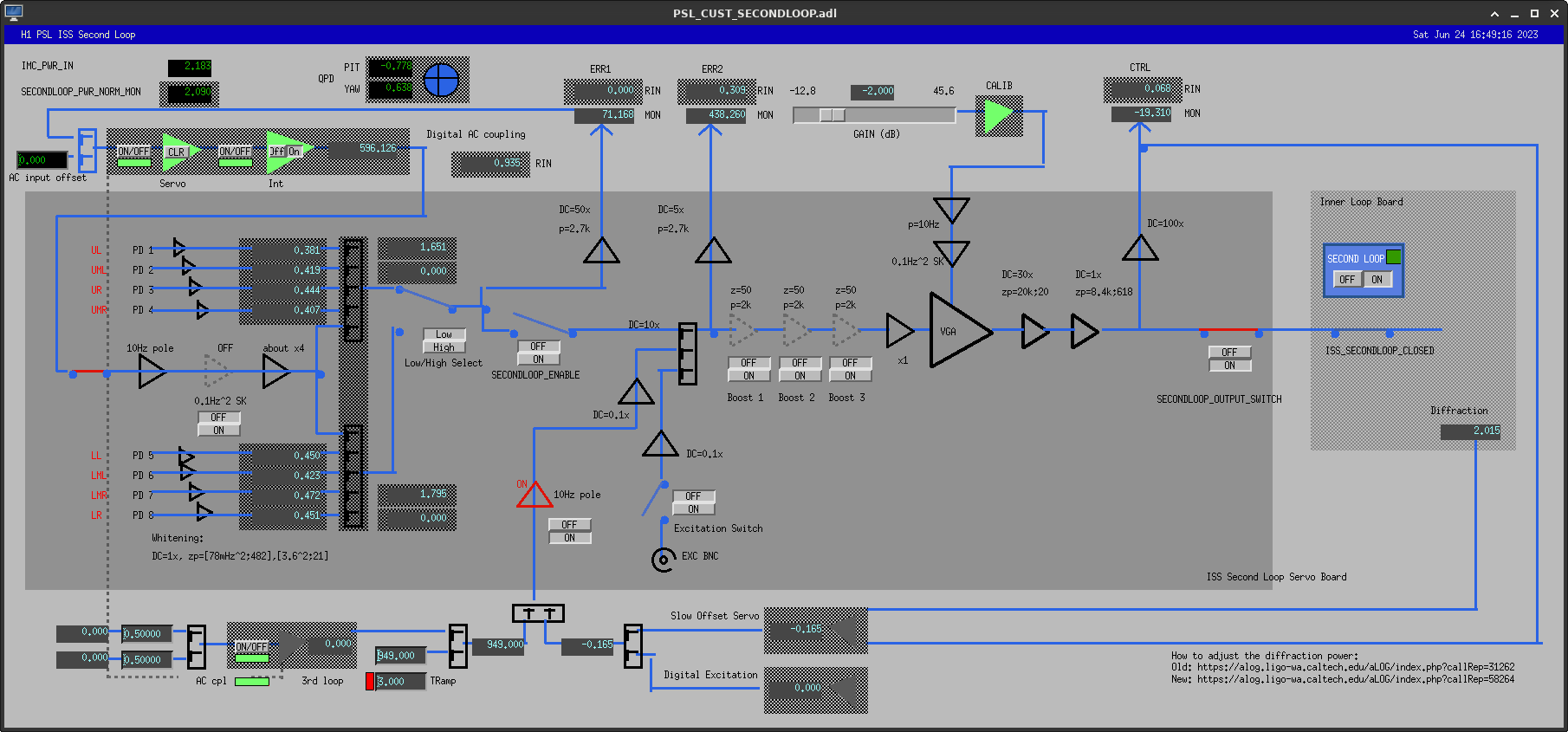
Following the recent lockloss, I have followed Ryan S. instructions to try and get the slow offset servo (H1:PSL-ISS_SECONDLOOP_REFERENCE_SERVO_OUT16) to 0. I tried to do this by adjusting the H1:PSL-ISS_THIRDLOOP_OUTPUT_OFFSET. I first tried offsetting the servo value, the servo was at -322, so I set the output to +322, which made the servo value worse. I then tried going in the positive direction which seemed to have made it better. After doing some back and forth moving the output, I was finally able to get the servo to ~-0.3 by setting the output to 949 - screenshot attached. I then cleared the history on the servo overview. Just in case we need to revert later, the original value for the output was +1272.
Value changed showed as a SDF diff for the OBSERVE snaps. Screenshotting and accepting.
