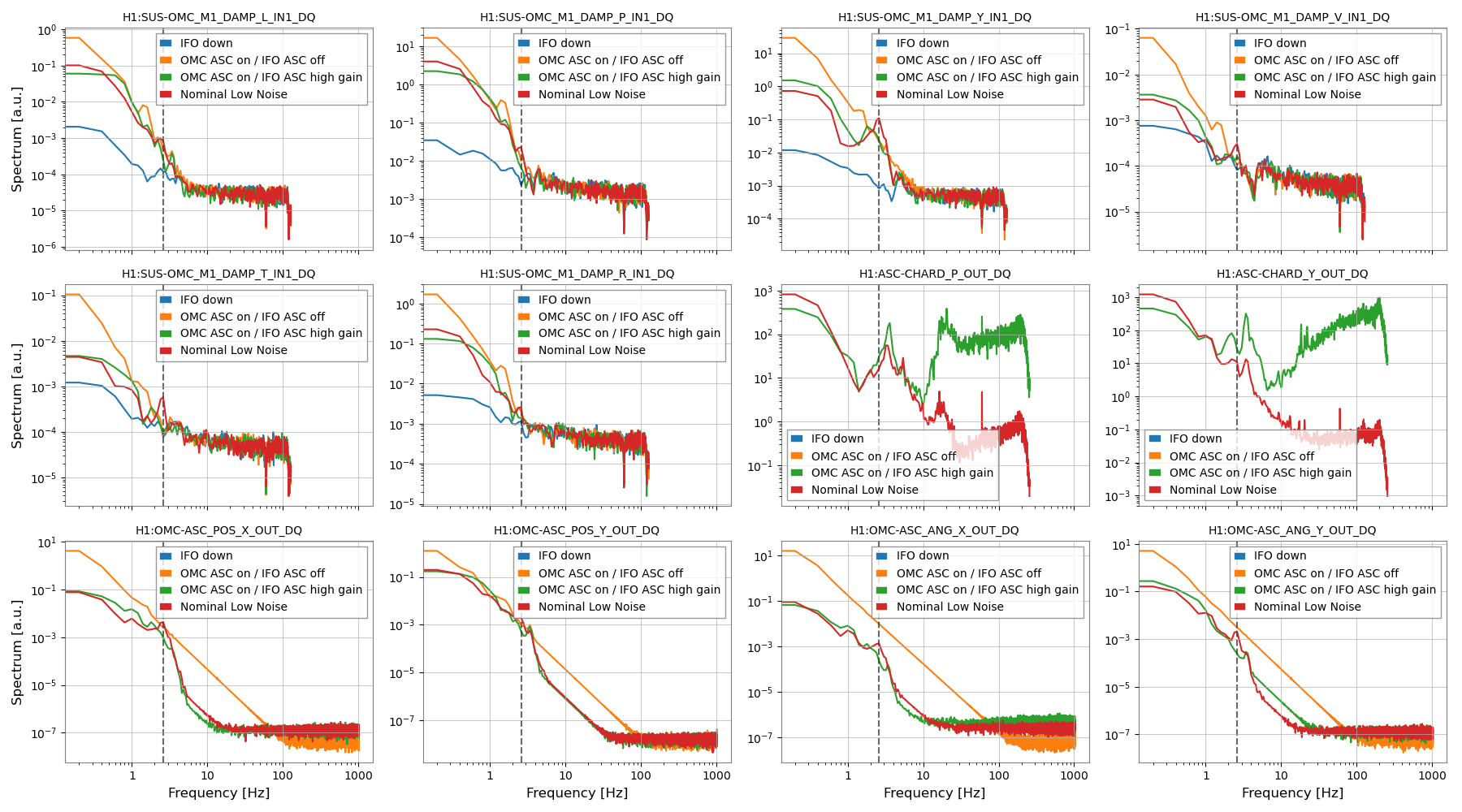
Trying to track down the origin of the 2.6 Hz peak, I looked at times during the lock acquisiton when the IFO is down, when only OMC ASC is on and when the IFO ASC is on. The first plot shows a compariison of OMC M1 damping signal, OMC ASC and IFO ISC in diffeerent configuurations. Some observations:
- the OMC moves a lot more when the OMC ASC is turned on
- it doesn't look like the 2.6 peak comes fm the OMC ASC along, but there are only ~15 seconds with OMC ASC on before the IFO ASC goes on
- it looks like the 2.6 Hzz peaks appears when the IFO ASC loops are in low-noise state
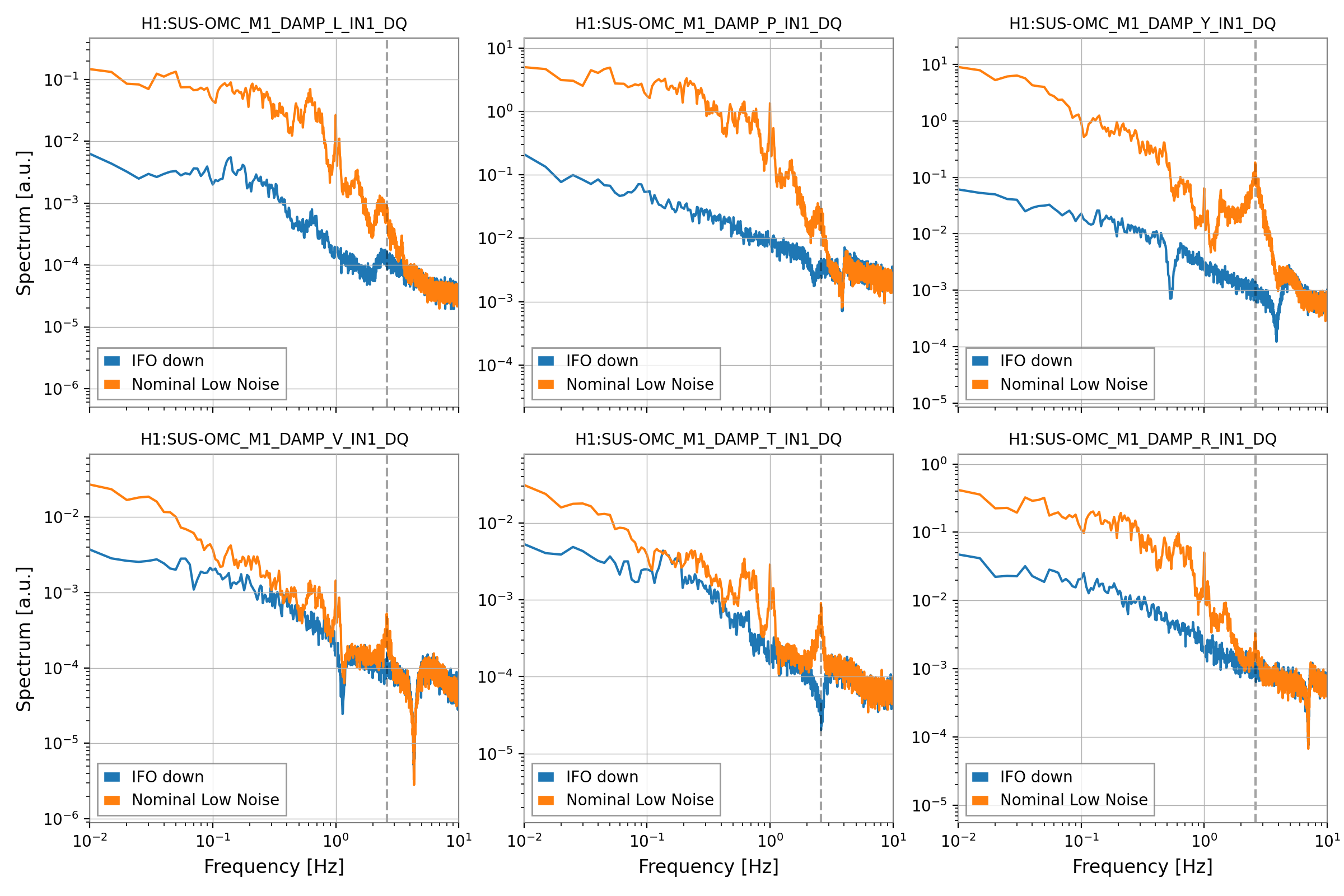
The second plot compares the OMC damping signal when the IFO is down vs nominal low noise: the OMC suspension is moving up to 100 times more when the IFO is in nominal low noise
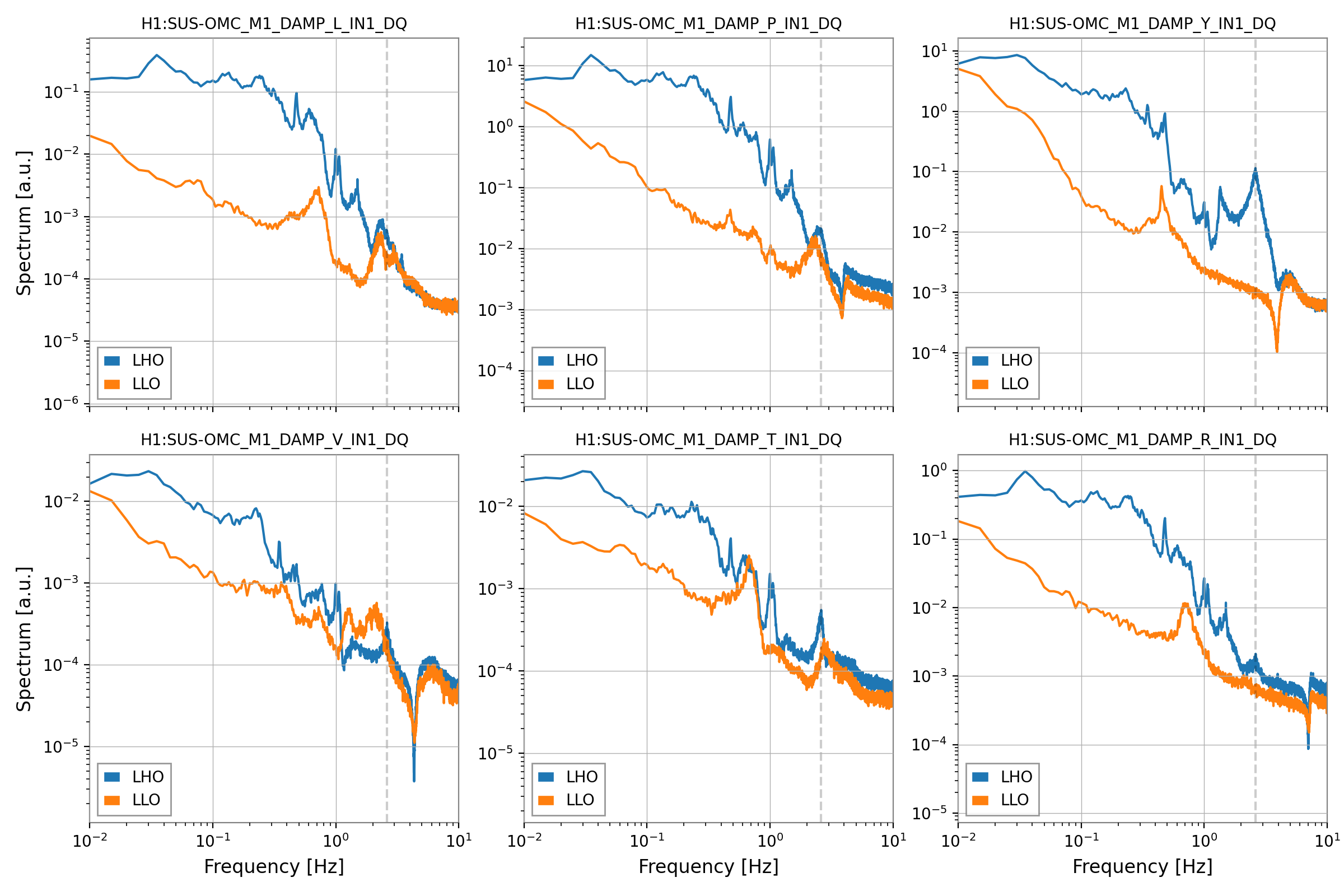
Finally, I compared the OMC motion at LLO and LHO during the same nominal low noise time. The LHO OMC moves a lot more than the LLO OMC.
Althouhg there is no evidence that the 2.6 Hz peak is generated by the OMC controls, it is very prominent in the OMC damping signals. It seems that the OMC ASC at LHO has too large bandwitdh: it would be worth investigating if a low bandwidth control like at LLO would work, and whether it can also improve the 2.6 Hz situation: it is possible that the 2.6 Hz motion is residual IFO angular control, but the OMC ASC makes it problematic for DARM by moving the OMC
@Gabriele -- this (loud OMC SUS signals that are different from LHO and LLO) is a known, and long-standing consequence of the two sites different choices for OMC ASC. LLO drives OM2 and OM3 (or maybe OM1 and OM2? I forget), where LHO drives OM3 and the OMC. The LHO drive to the OMC shows up in the OMC damping loops as you've found.
That being said, 2.625 Hz is the modeled first Transverse / Yaw mode of the OMCS, see OMCS Model. A reminder of the coordinate systems in HAM6 can be found here: G1300086.