After Gabriele made a major improvement on the DHARD Y coupling (alog 71588), since LLO was still working on relocking, I checked the A2L gains for the 3 test masses that we use for ADS during locking. The summary is that the change seemed to be small enough that it's not worth keeping long term, so I have not modified ISC_LOCK. I did accept the changed A2L gains for this lock, so next lock, the operator will see SDF diffs and need to accept them.
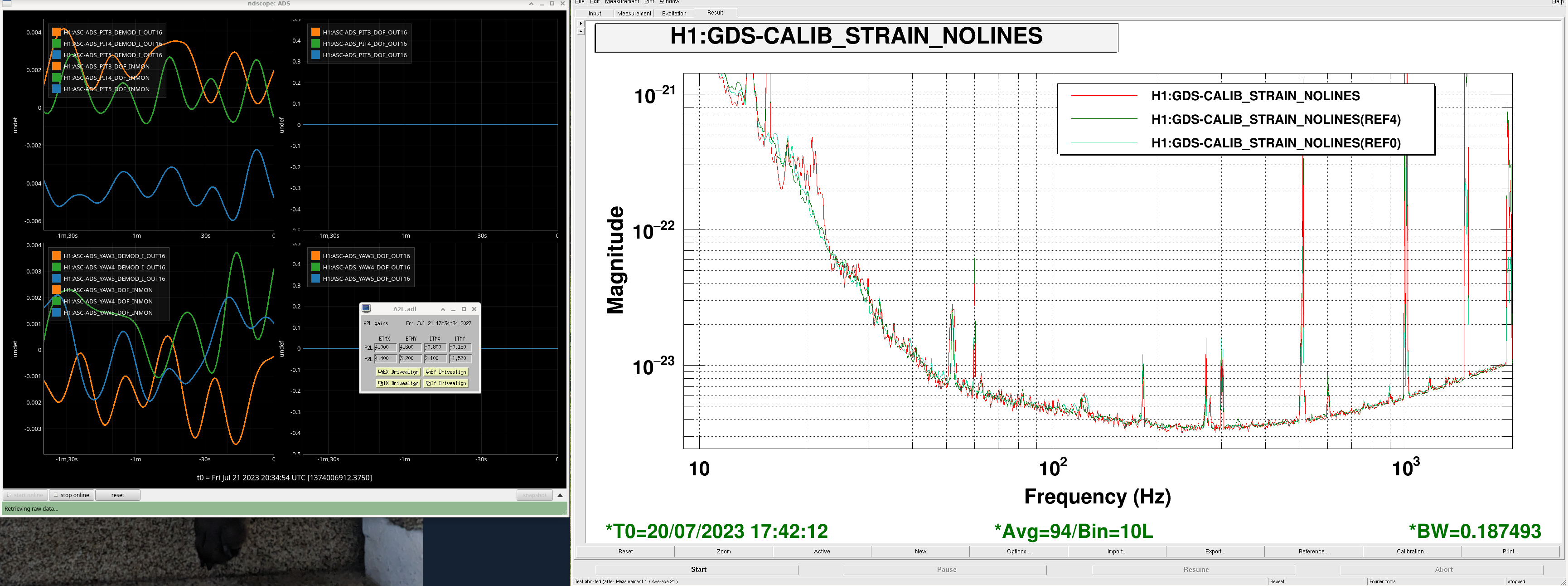
Rather than being fancy and using the ASC as a metric for when the decoupling is good, I used 'the old way' of dithering the suspensions using the ADS and changed the A2L gains to zero the error signals. (To see the ADS error signals I had to put the gains H1:ASC-ADS_[PIT,YAW][3,4,5]_DEMOD_I_GAIN to 1, because they are set to zero by the camera servo guardian).
The first attachment is how the ADS error signals looked before I made any changes to the A2L gains for EX, EY, or IX. This is after Gabriele adjusted IY in alog 71588.
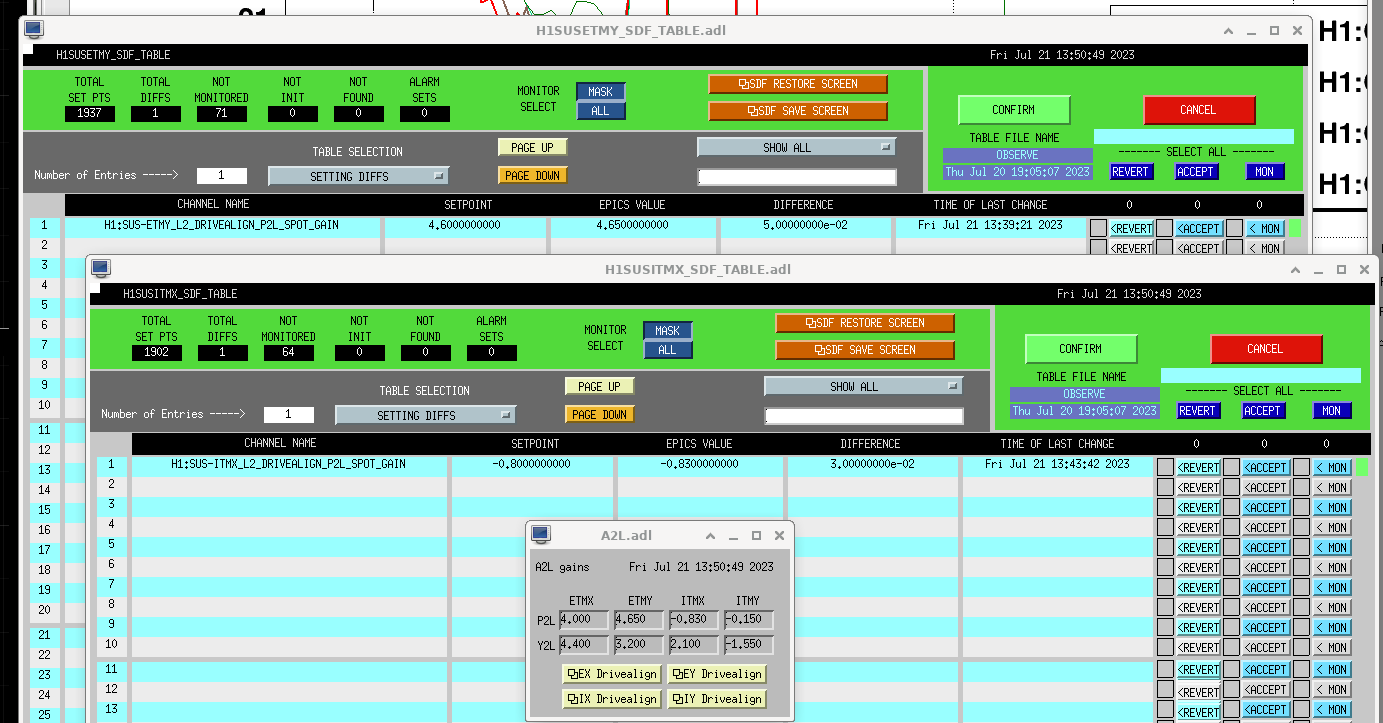
The second attachment is after I adjusted two of the P2L gains (the only two I ended up changing), to get the ADS error signals closer to zero.
The third attachment is the SDFs that I saved in the Observe.snap, that I did not put into lscparams/ISC_LOCK, so will need to be re-accpeted next lock at the values that guardian will set them to.
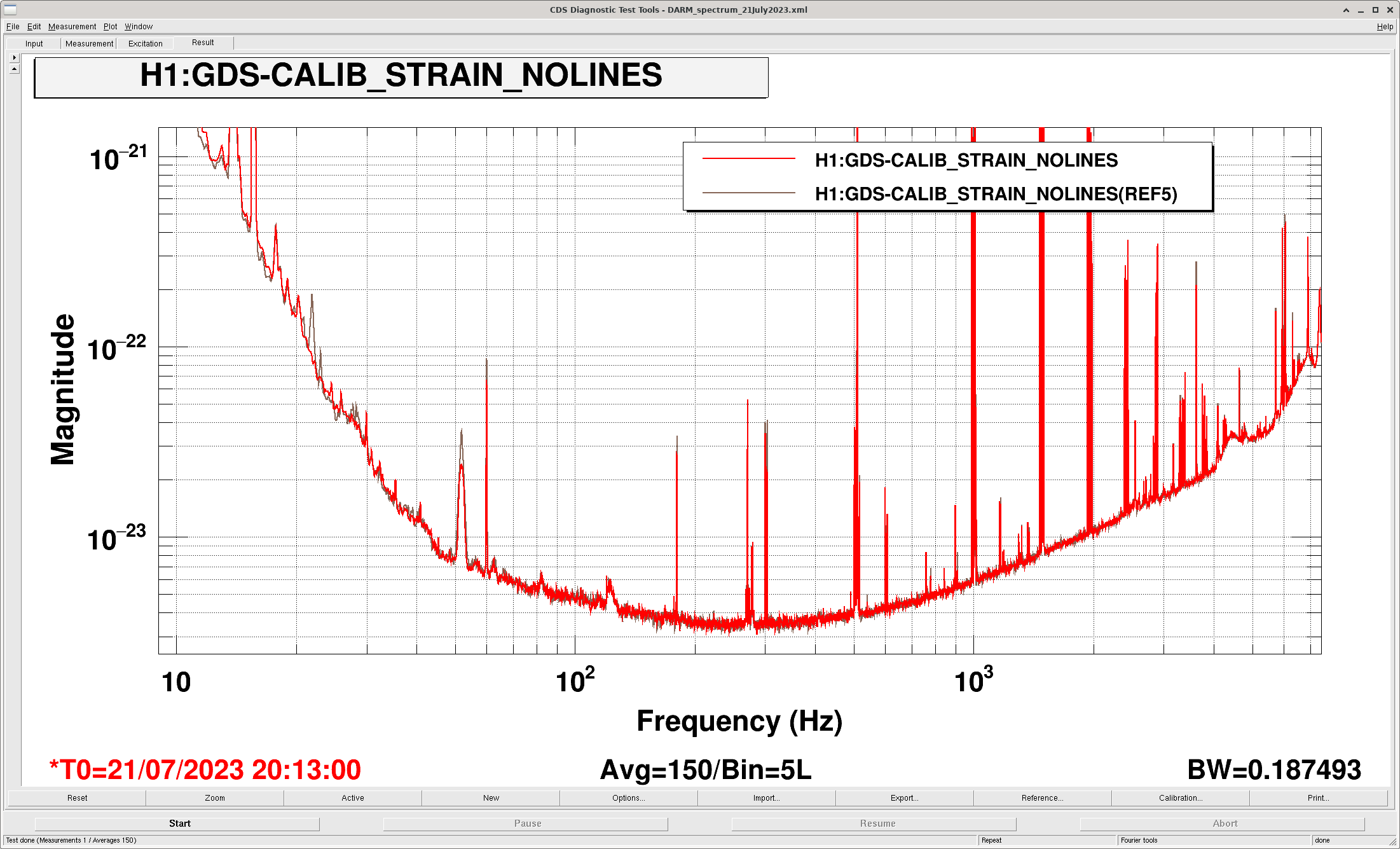
The fourth attachment is a comparison of the spectra (Brown before I changed any A2Ls, Red after), where I don't see much of a difference, but maybe Brown is better-ish anyway, which is why I'm planning to leave the A2Ls alone in the guardian. But, we'll be able to see throughout this lock whether there is a change worth making.