In summary, the low frequency noise is improved and more stationary with the new CHARD_Y higher gain controller and reduced test mass damping gain in yaw. Also, the glitch rate is largely reduced.
Effect of new CHARD_Y controller
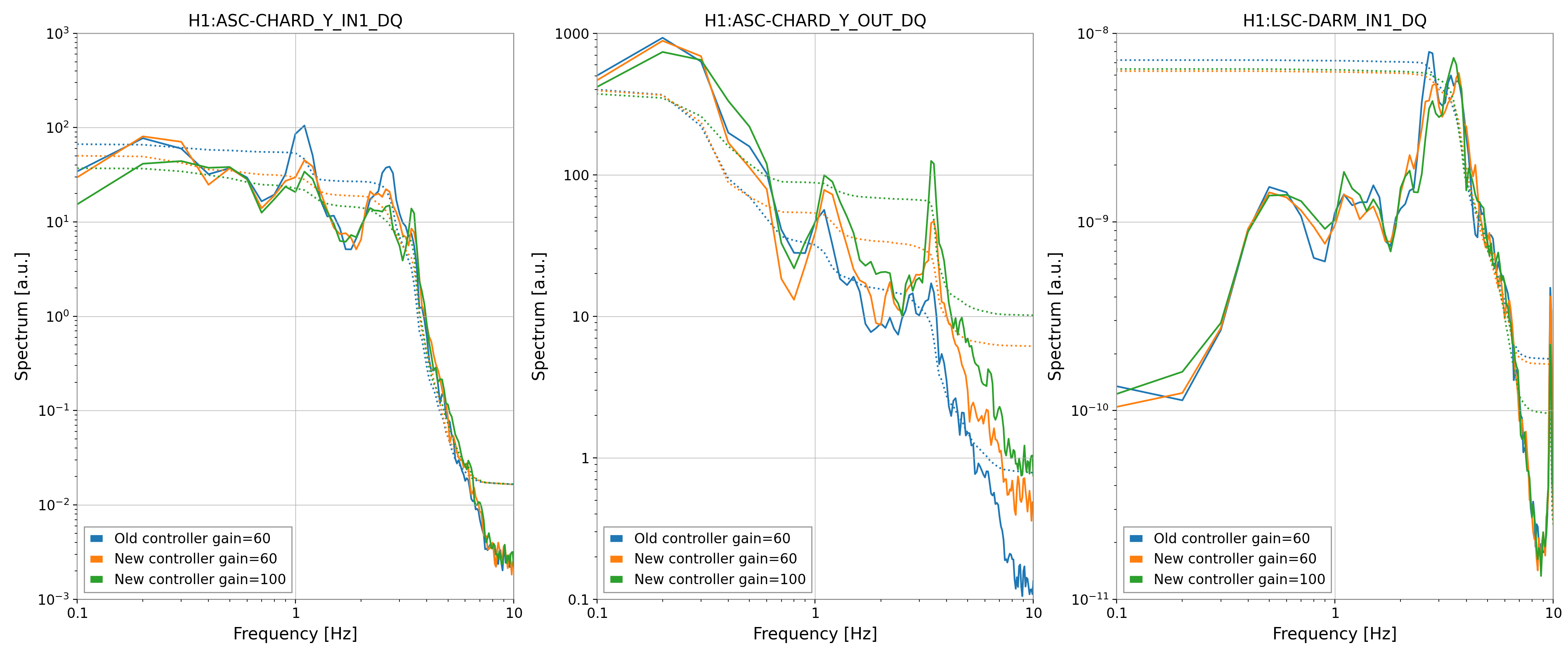
A new controller was designed based on the previous measurement of the CHARD_Y plant. This controller is implemented in FM9 (as an additional module that can be switched on with the other modeles). This can be engaged with the nominal gain of 60, and then the gain can be increased up to a factor 3 to 180. After a few tests I found that a gain of 100 seems ok, higher gain increase the amplification of a 3.4 Hz narrow peak. The amplification is expected due to a broad gain peaking of the new controller. However, the peak itself is already there and not related to the CHARD_Y controller. If we manage to track down the origin of this peak and improve it, we could increase the CHARD_Y gain even more. As it is now, more gain doesn't improve much the CHARD_Y RMS because of this 3.4 Hz peak.
With this new configuration, the CHARD_Y RMS is significantly reduced around 1 Hz (no more gain peaking) and 2-3 Hz (more suppression).
Effect of reducing the test mass damping gain
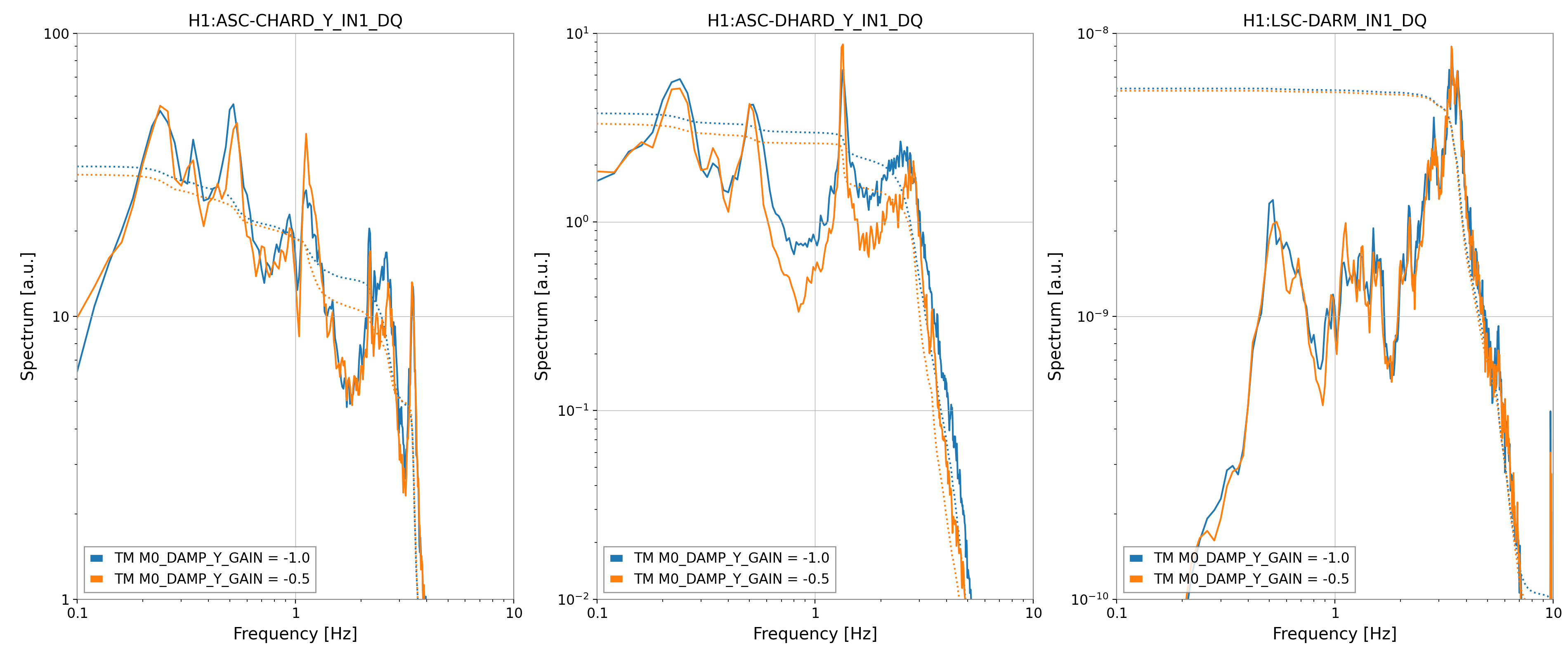
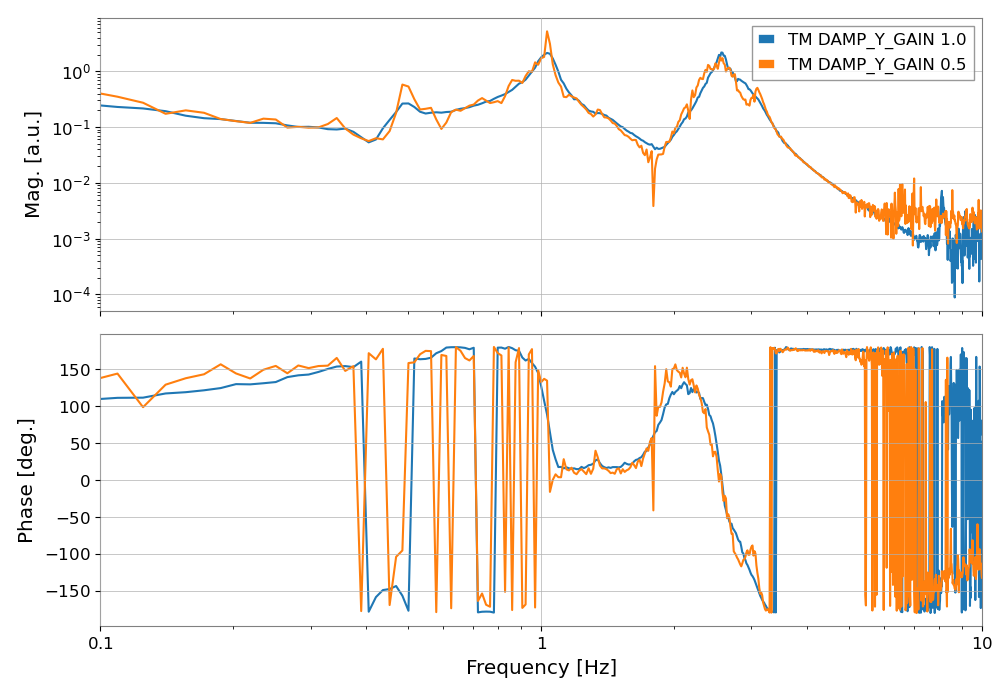
With the new controller in place, I repeated the old test of reducing the test mass damping gain in yaw. I realized that the 1 Hz oscillation I saw in my previous attempt was due to the CHARD_Y gain peaking at 1 Hz getting worse. the new controller solved this problem. Indeed, I could reduce all test mass damping gains from -1.0 to -0.5 without problems. This improves a bit the CHARD_Y motion, and improves significantly the DHARD_Y motion. So it's a good change to have.
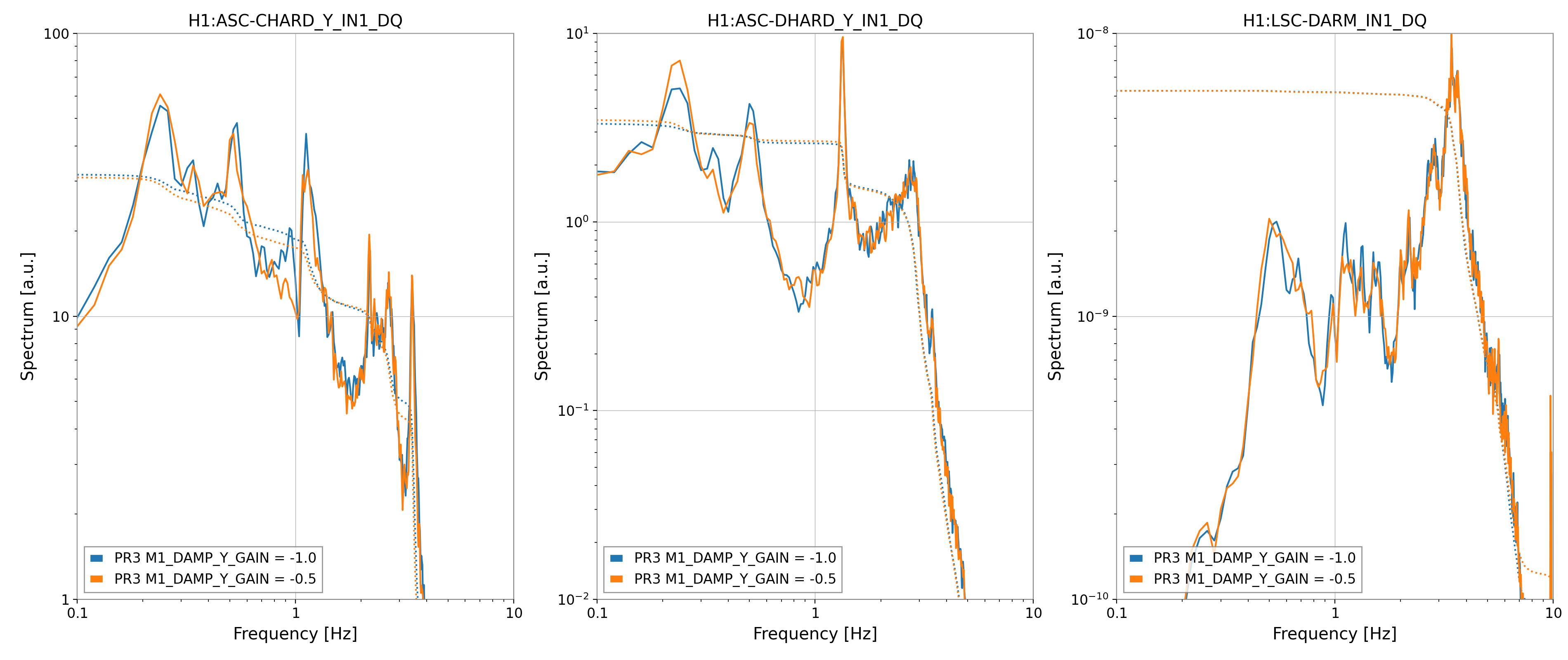
I also tried to reduce the PR3 M1 yaw damping gain, since CHARD_Y was coherent with PR3 damping, but I did not see much of an improvement.
Noise improvements
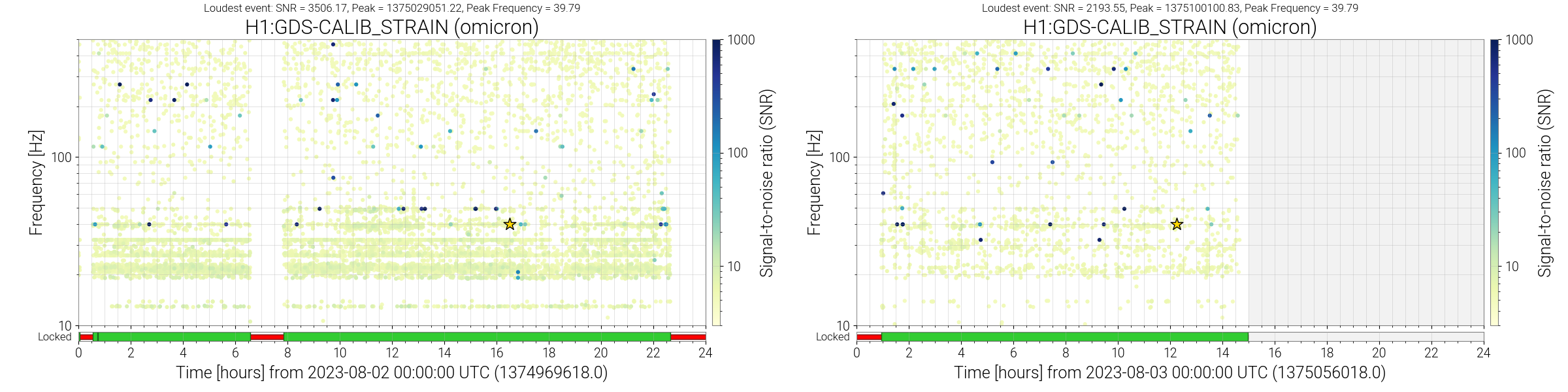
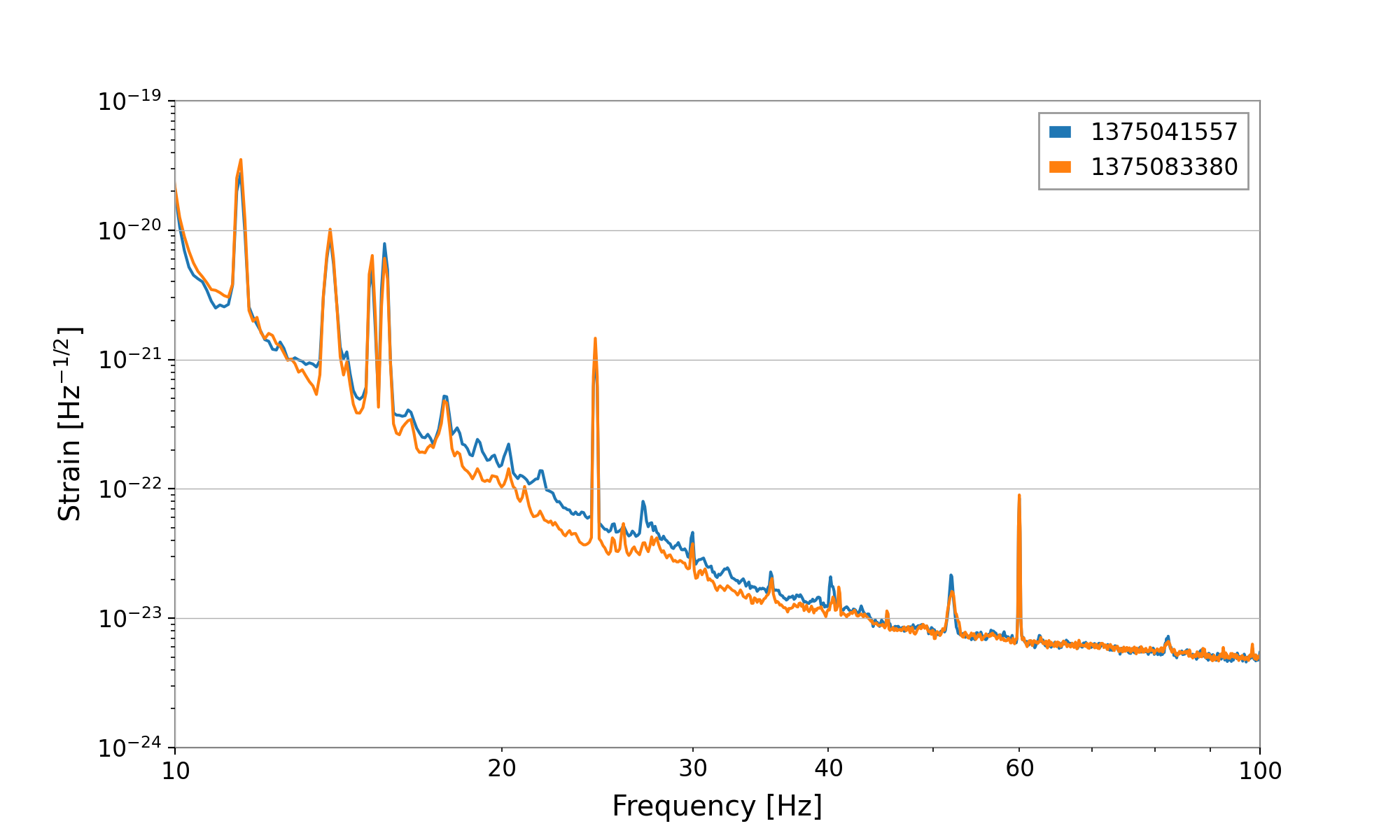
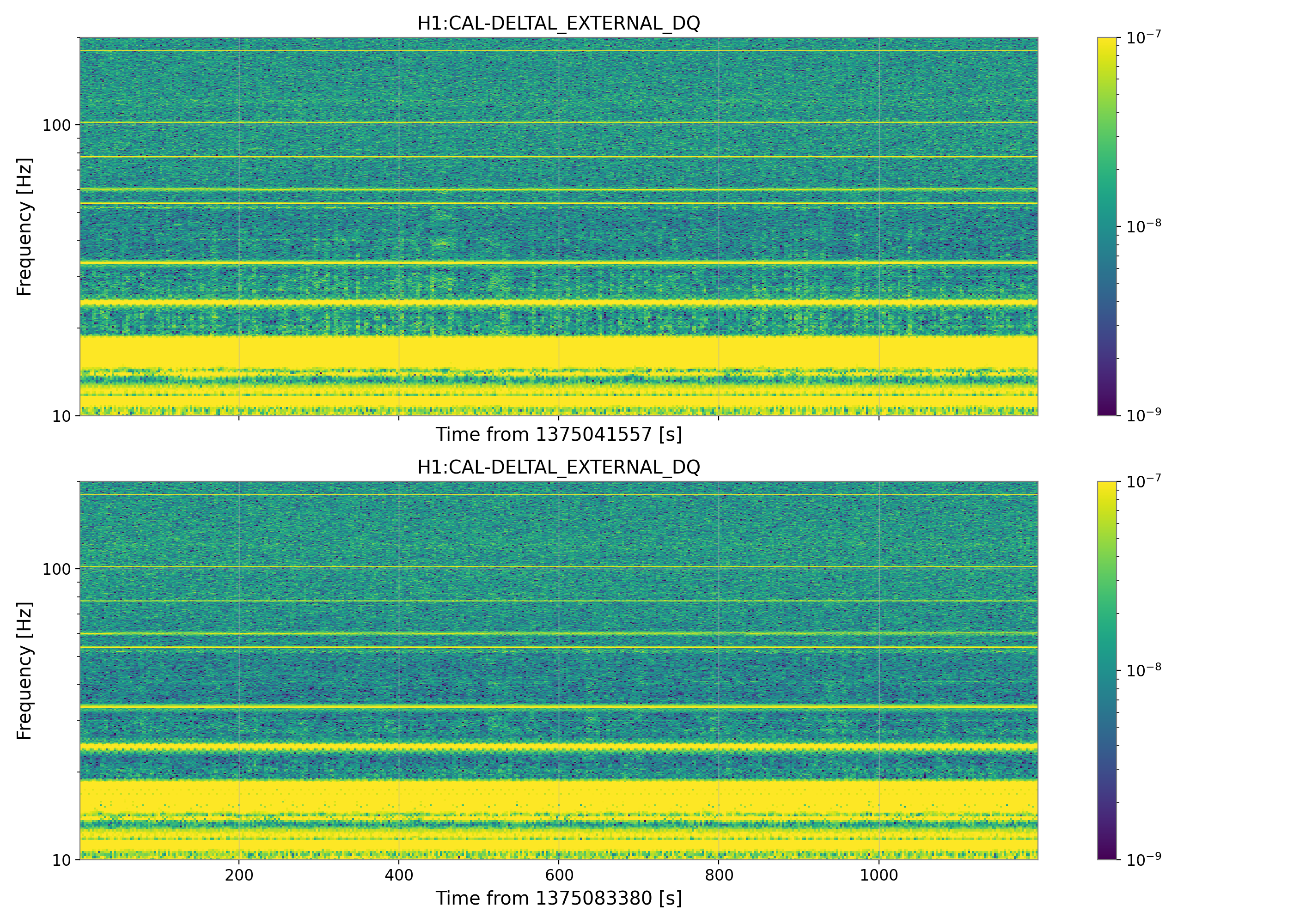
Those changes were left overnight, and the noise was much better. On average, the DARM noise below a few tens of Hz is lower. The main difference is the disappearence of most of the non-stationay noise, as visible in a spectrogram. Comparing the omicron glitch plots from before and after the change, the number of glitches in the 20-50 Hz region is much lower.
Next steps
I suggest we leave the new CHARD_Y controller with a gain of 100 as the default configuration. I also suggest that we run with reduced test mass yaw damping. I would leave the PR3 damping at -1. I would also keep the current value of -1.50 for ITMY Y2L gain.
Next things to check:
- Compare the CHARD_Y plant with the reduced damping gain with the one with nominal gain. I noticed that the 1 Hz peak is increasing, so there might be a change in the CHARD_Y plant due to the change in damping gain. This is expected. We might want to re-measure carefully the CHARD_Y and DHARD_Y plants and further improve the controllers with reduced test mass damping.
- Find the origin of the 3.4 Hz peak that would be limiting the CHARD_Y RMS wiht higher gain. Also, maybe worth trying to increase CHARD_Y gain all the way to 180 and see if things are better or worse
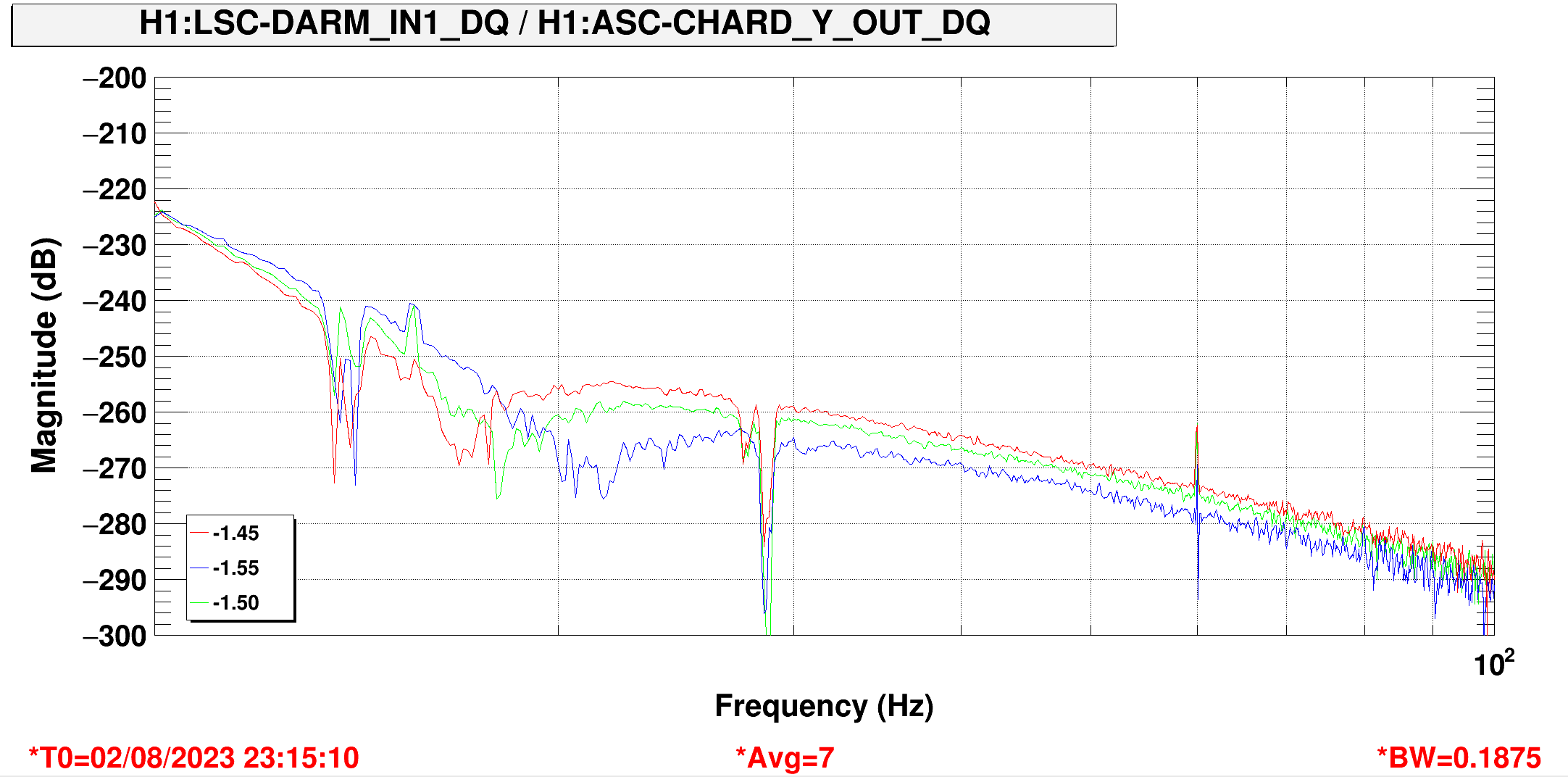
- Look into the Y2L decoupling. More details in another alog entry, but it is evident that there are two coupling paths from CHARD_Y to DARM: one with a steep frequency dependency below 20 Hz, and one flat-ish above 20 Hz. Changing ITMY Y2L coefficient changes the two paths in opposite directions
Right before the lock loss yesterday, I managed to snap a quick CHARD_Y plant measurement. It's not good enough to fit a new plant model, but it hints at small changes in the plant due to the reduced test mass damping.
It's worth doing again a careful measurement of both CHARD_Y and DHARD_Y with the reduced test mass dampng, and fine tune filters accordingly.
Here's a better plot showing how the coupling from CHARD_Y to DARM changes with the ITMY Y2L gain.
For now it doesn't look like CHARD_Y is limiting DARM, but we should investigate this behavior more if we need to further reduce the coupling to increse the DHARD and CHARD gains
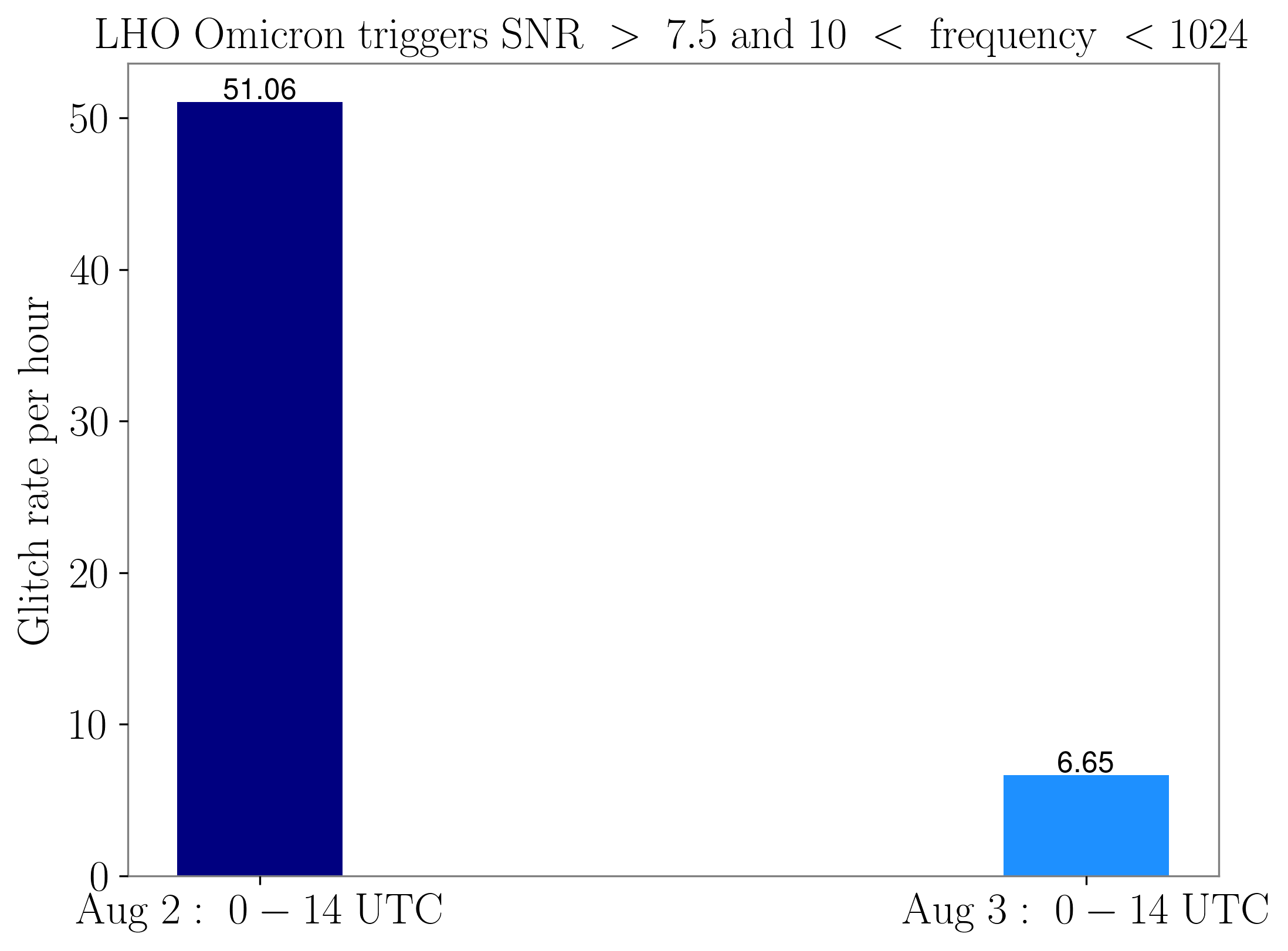
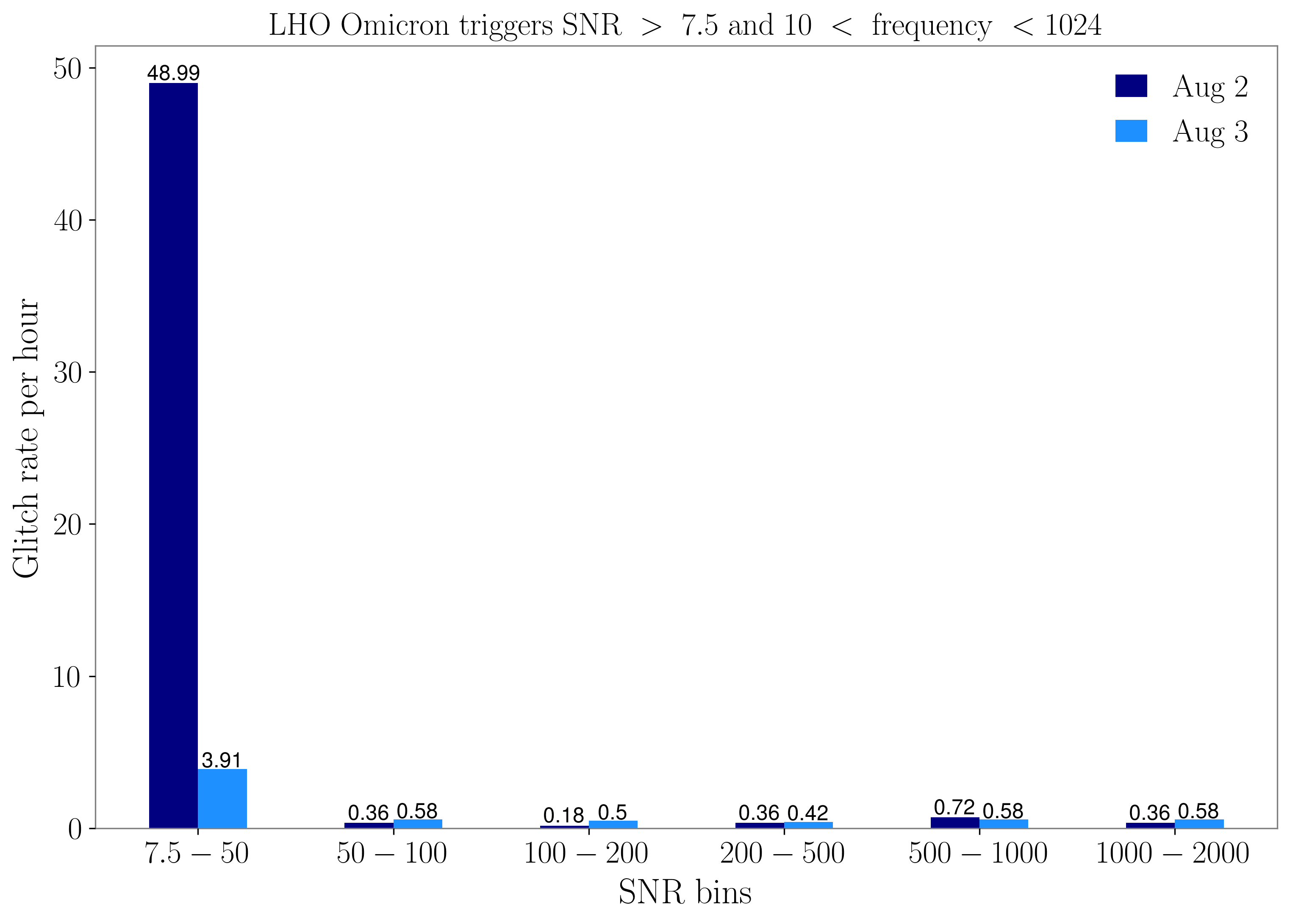
I did a quick check into the Omicron glitches before and after these changes to see the difference. I grabbed Omicron triggers with SNR > 7.5 and frequency between 10-1024 Hz on August 2nd 0-14 UTC and August 3rd 0-14 UTC. The first plot attached shows a comparison of the glitch rate per hour. During the period on the 2nd, the glitch rate per hour was around 51, whereas on the 3rd after these changes it's at about 7 per hour. The second plot shows the glitch rate as a function of SNR. Below an SNR of 50, we see a large reduction in the glitch rate, suggesting a large reduction of this low frequency noise.
The new configuration has been implemented in the ISC_LOCK guardian, in the LOWNOISE_ASC state:
class LOWNOISE_ASC(GuardState):
[...]
def run(self):
[...]
elif self.counter == 2 and self.timer['LoopShapeRamp']:
ezca.get_LIGOFilter('ASC-CHARD_Y').ramp_gain(100, ramp_time=10, wait=False) # increased to 100 again on August 3, see below
ezca.switch('ASC-CHARD_Y', 'FM3', 'FM9', 'ON') # new chard Y high power controller with LP built in, should be engaged with low power controller FM2, more useism with FM3
# FM9 is the controller to improve low frequnecy noise (August 2, see alog 71927)
self.counter += 1
self.timer['LoopShapeRamp'] = 10
[...]
elif self.counter== 9 and self.timer['LoopShapeRamp']:
# reduce test masses M0 DAMP yaw gains
ezca['SUS-ITMX_M0_DAMP_Y_TRAMP'] = 10
ezca['SUS-ETMX_M0_DAMP_Y_TRAMP'] = 10
ezca['SUS-ITMY_M0_DAMP_Y_TRAMP'] = 10
ezca['SUS-ETMY_M0_DAMP_Y_TRAMP'] = 10
ezca['SUS-ITMX_M0_DAMP_Y_GAIN'] = -0.5
ezca['SUS-ETMX_M0_DAMP_Y_GAIN'] = -0.5
ezca['SUS-ITMY_M0_DAMP_Y_GAIN'] = -0.5
ezca['SUS-ETMY_M0_DAMP_Y_GAIN'] = -0.5
self.counter +=1
self.timer['LoopShapeRamp'] = 10
elif self.counter==10 and self.timer['LoopShapeRamp']:
return True
This gave the expected SDF diff in the PR3 damping gain. I have accepted it, as attached.
