This aLog hopes to be something similar to this LLO aLog concerning why they do not currently wish to attempt to actively actuate on their 80.4 kHz PI.
I attempt the same procedure, calibrating to a fairly arbitrary amplitude, which in the case of LHO corresponds to 1 at the average mechanical mode amplitude at a well thermalised time.
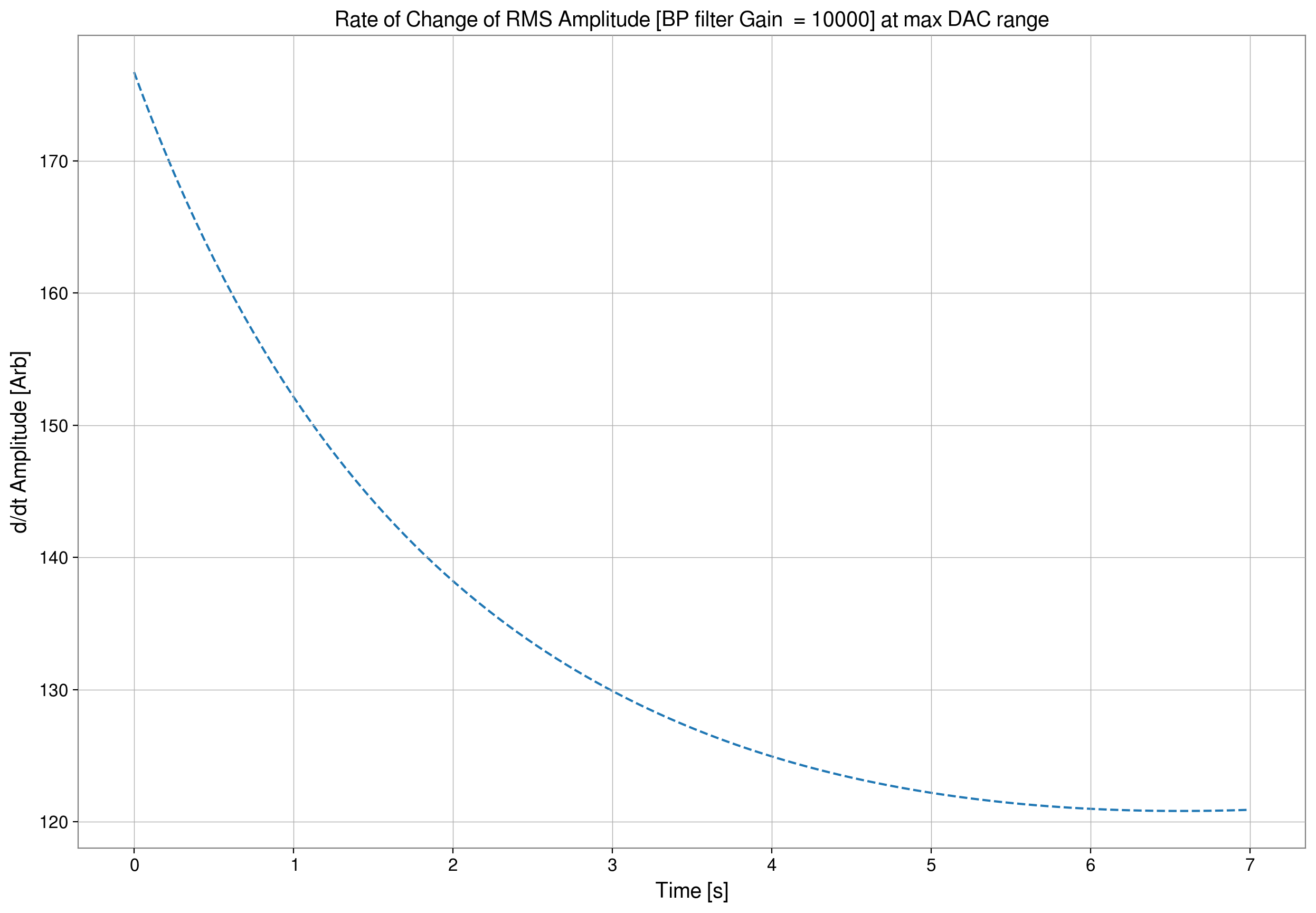
I project a rate of change of amplitude at the maximum DAC rate, based on observing amplitude growth rates at the exact optimised actuation phase to drive up the mode as fast as possible. Its not very constant like it was in LLO, but the rate is something about 60 times higher at about 120 "amp"/s.
On the other hand; the PI gain is significantly stronger here (260 vs LLO's 55), almost certainly fully attributable to the higher Q factor of the mechanical mode (1.7million vs LLO's 0.67 million).
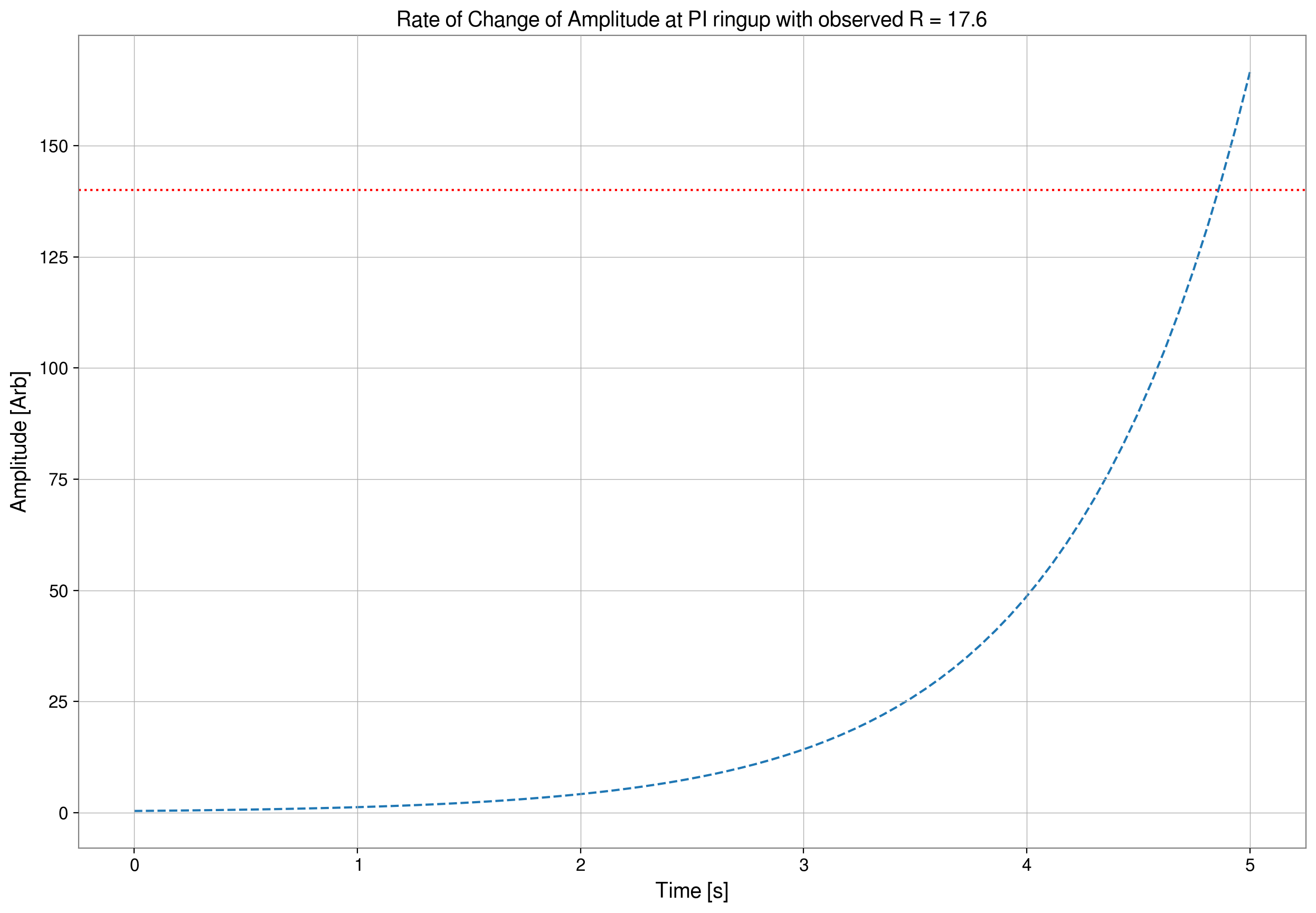
At the end of the day, the stronger actuation allows you to damp the mode back down even if it has grown in excess of 100x its normal ampliutude [red line is the actuation limit], compared to LLO's limit of about 2x visible amplitude (which is probably about 5x its normal amplitude).
The bad news:
The rate of change of amplitude of this mode still means that if something goes wrong, its game over within 5 seconds of fumbling around (much less actually as what I model here is only gain of 17, not the expected maximum gain of 260).
More-over there are issues on the sensing side:
- Changes to high frequency noise, e.g. Jenne's changes this week, decrease the SNR in locking onto this mode, causing un-reliable PLL locking.
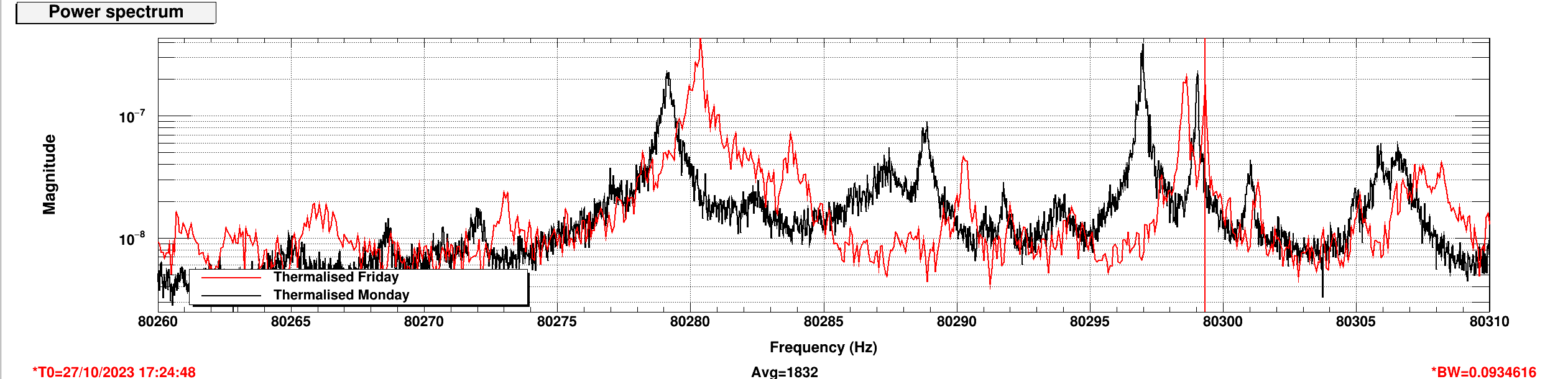
- Unlike the isolated-by-many-Hz-on-both-sides mechanical mode of LLO, LHO's troublesome mode has very nearby neighbors. More-over, this mechanical mode, and it's friends move several Hz around the place based on thermal couplings that are not obvious to me at this stage. So much so that they almost overlap the mechanical mode in frequency, meaning that you are not going to have good clear actuation on this mode, unless it rings up significantly, and by the time the PLL locks, it will be un-dampable.
- Here is a screenshot of 2 very well thermalised times (each time locked for several days). The vertical red line is the problematic mode. You can see drastic frequency changes of all modes, and the lower frequency neighbor is much too close to for the band-pass filters we use.
- Outside temperatude was dramatically differenent on these 2 days. (~15 Celcius).
- You cannot rely on setting up a static narrow band filter to cover this mechanical mode for 2 reasons:
- It moves several Hz on a day to day basis.
- You need as broad of a bandpass as possible to reduce the phase impact of a peak that is moving through its band.
Bottom line: while theoretically this PI can be handled, it would be impossible in practice. Avoid at all costs.