kiwamu.izumi@LIGO.ORG - posted 18:26, Tuesday 20 August 2013 - last comment - 08:36, Wednesday 21 August 2013(7490)
IMC ASC characterization
[Stefan, Kiwamu]
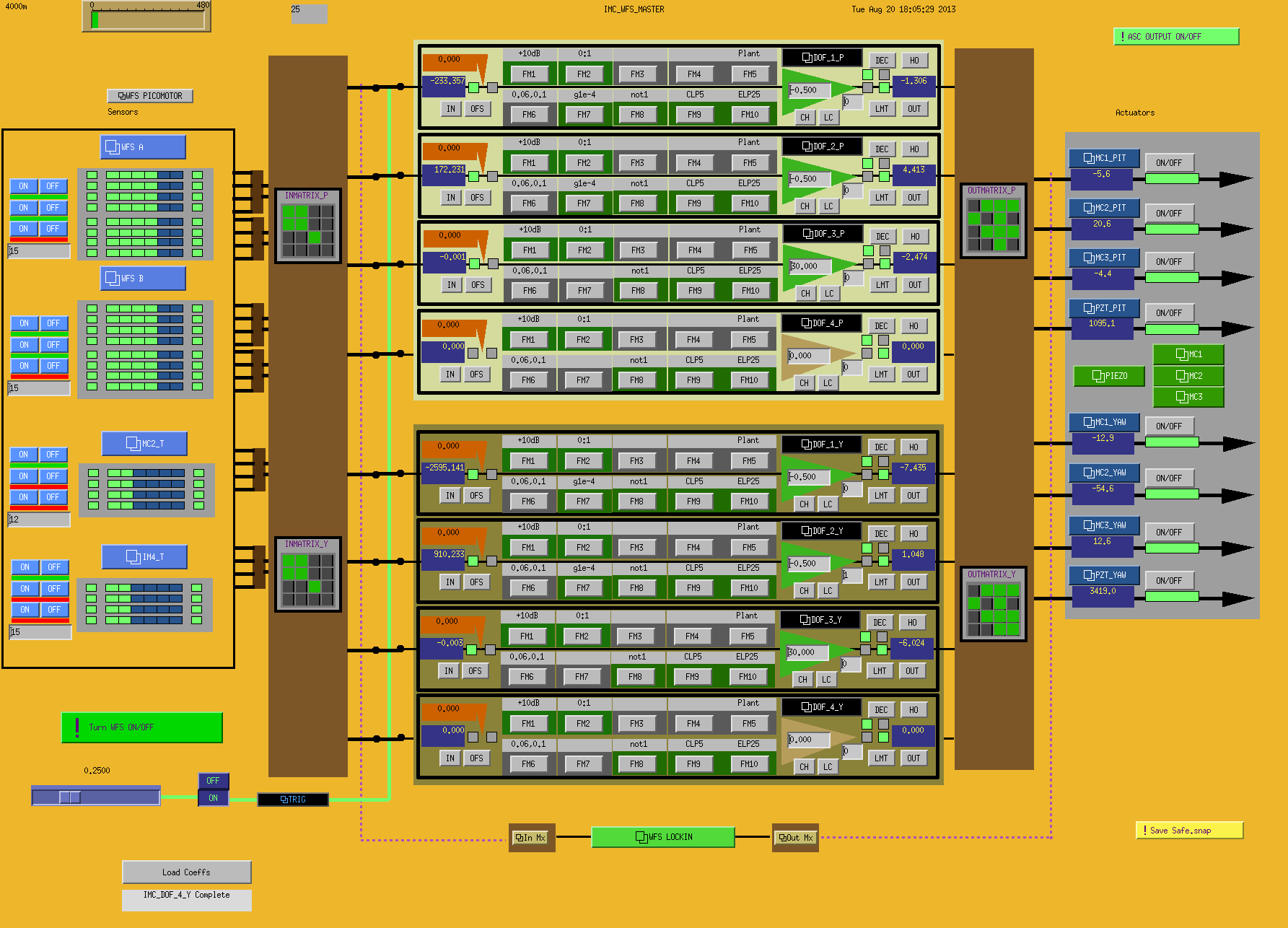
As a part of the commissioning wrap up porjects we characterized the IMC ASC control.
Adjustment of UGF:
-
UGF of the all 6 loops was adjusted to be about 0.08 Hz, measured with an impulse response method
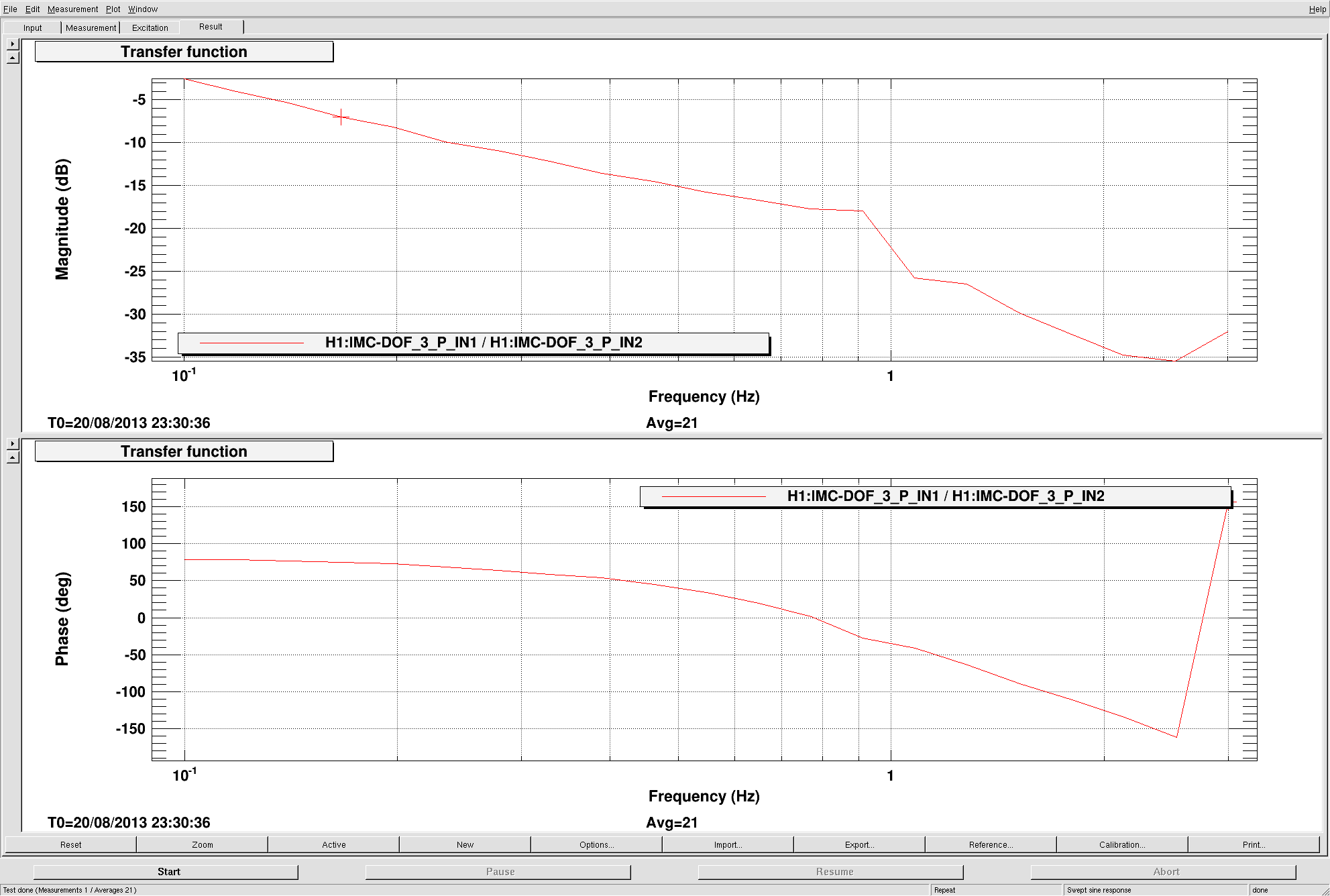
- we had a difficulty in exciting the suspension with swept sine signals and ended up with the impulse response technique where we inject a step function at the error point and see the behavior of the error signal.
- Later Stefan managed to measre the open loop with swep sine. See tha attachement.
Change in servo shapes:
-
Looking at the spectrum of the WFS error signals we noticed there was a sharp peak at 1 Hz which is a pitch resonance of the triple suspension.
- The height was about 10 times higher that the floor around this frequency
- We impleted a notch filter at 1 Hz with Q of 2 and heiht of 30 dB.
- Instead of enabling FM6(0.06, 0.1) we decided to go with this simple notch filter.
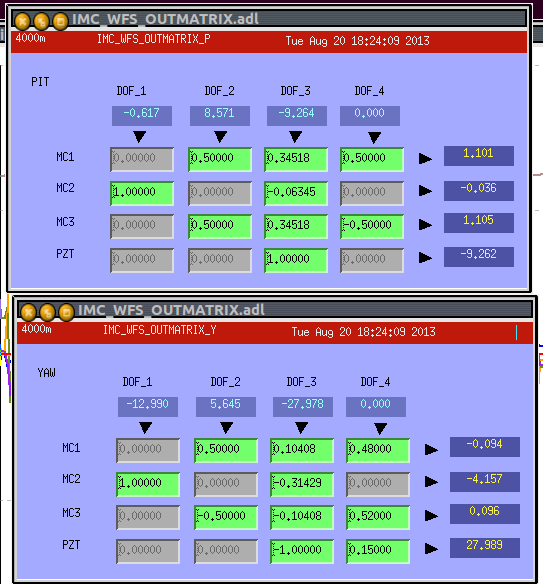
Adjustment of Output matrix for DOF3:
-
We put non-zero numbers in the cross-coupling elements in the outmatrix for DOF3.
- We have been using only PZT for feedabck, but this made the response of the control slow because DOF1 and 2 needed to wait and follow the movement of DOF3.
- Instead of doing this cascaded loop we tried a simpler scheme by feeding the signal back also on the suspensions.
- This worked well.
Some other changes :
- we increased the whitening gain of IM4 TRANS from 15 to 45 dB.
- we enabled the top two whitening stages for each WFS
Images attached to this report
Comments related to this report
Also we implemented a flat gain (of 1e-4) in FM7 for DOF1 and 2 such that the displayed gains are at around 1 as they used to be too small to display.