shoshana.apple@LIGO.ORG - posted 10:02, Thursday 08 February 2024 - last comment - 08:31, Tuesday 13 February 2024(75785)
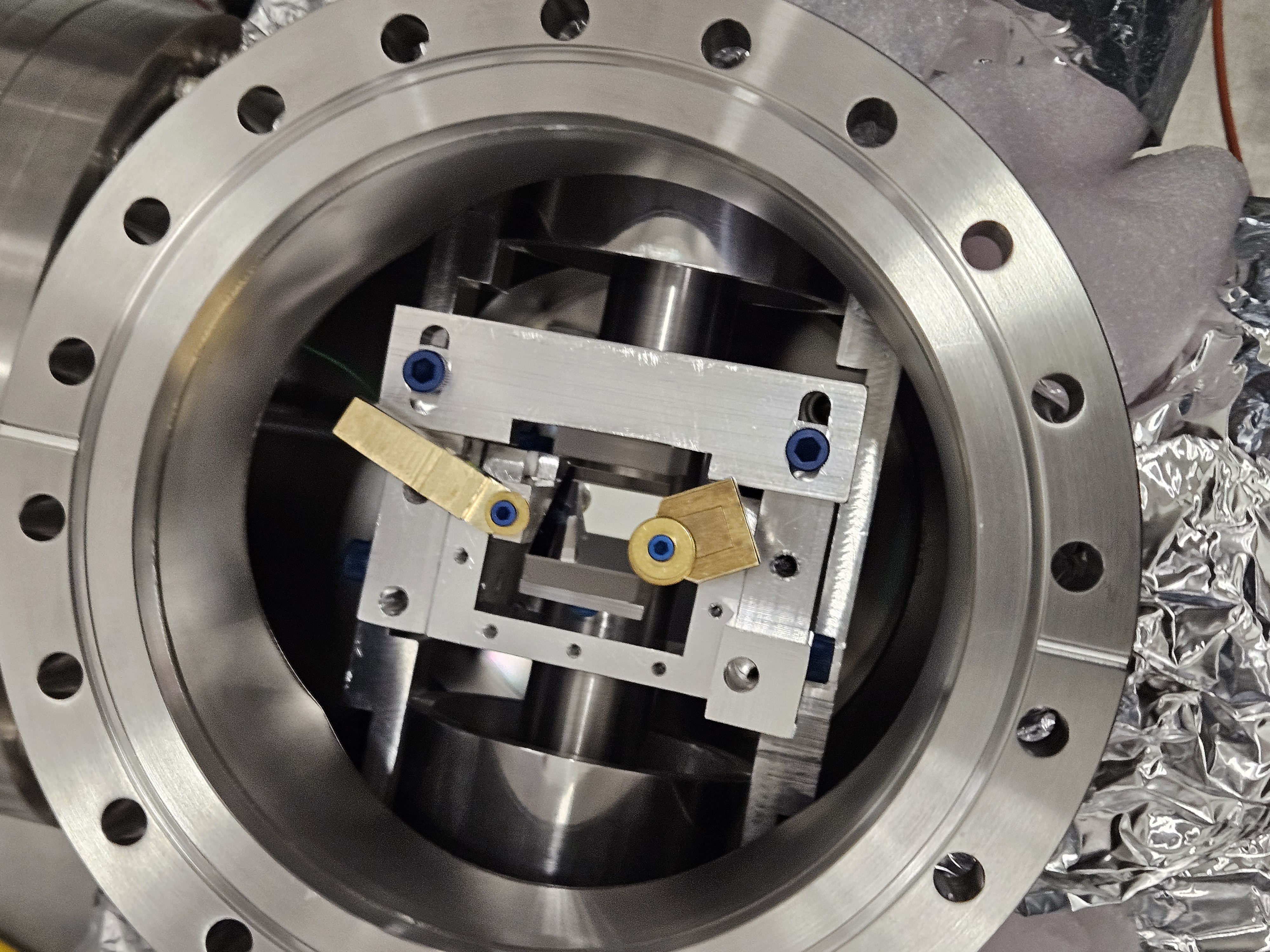
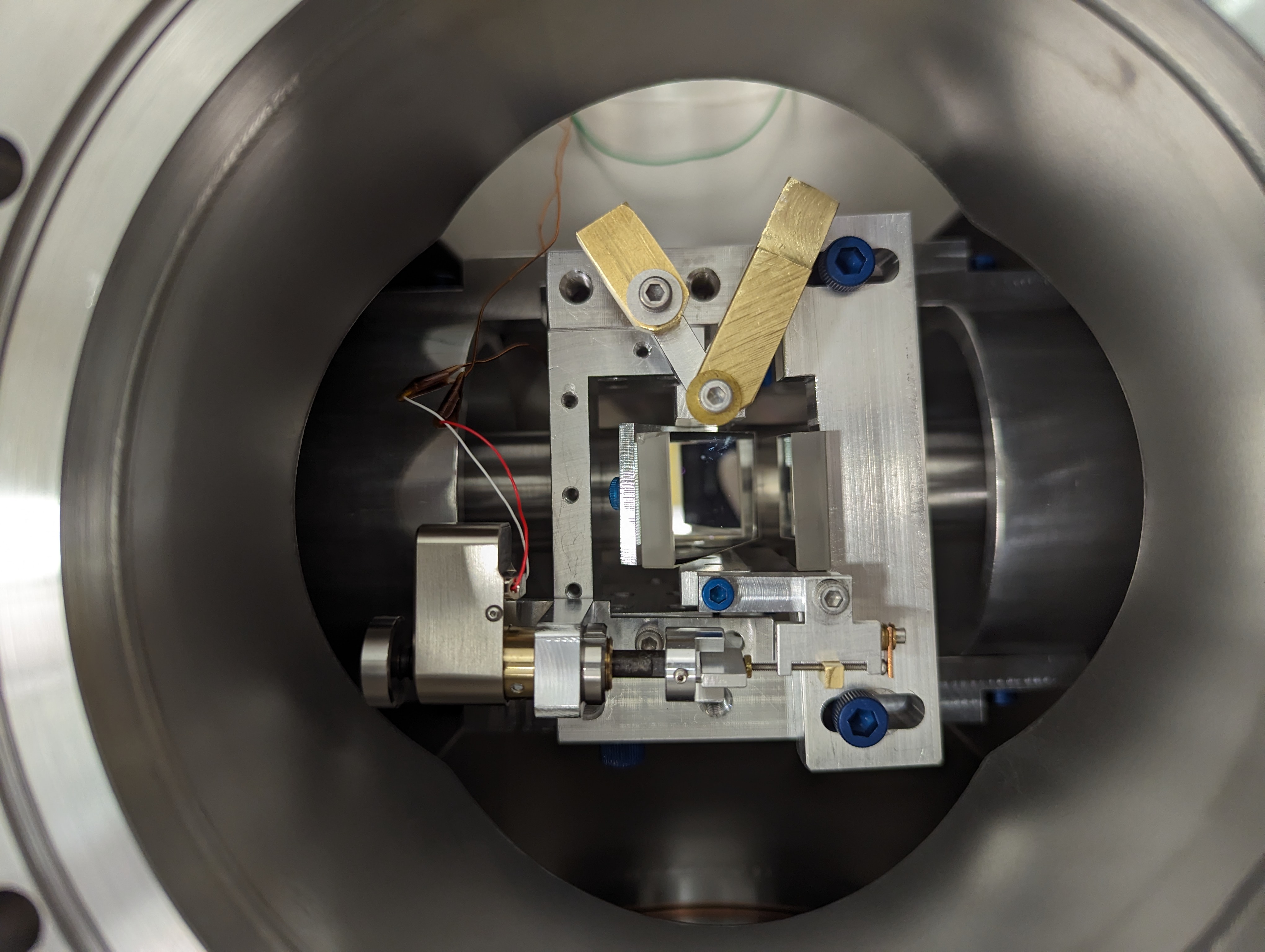
BRS Remote Mass Adjuster Install
[Michael, Jim, Tony, Shoshana, Neil] We've spent the week working on installing a remote mass adjusting/balancing system for the End-X BRS. Upon opening the End-X BRS we discovered that it is slightly different than the other BRSs (most likely because it was the first one built, photo 1 below) so we had to get a couple extra parts machined for the parts we brought from UW to fit properly. The hardware has finished being installed (photo 2), and we've run a quick test of the picomotor (Newport 8341-UHV) to make sure it has full range of motion. We've finished closing the BRS up and are now waiting for it to pump down before doing some additional in-vacuum tests. We are writing up some installation and balancing instructions as well as leaving another set of parts, so a remote balancing system can be installed on the other BRS. We assume the End-Y BRS should fit the drawings on the dcc (D1800045), so no additional parts should need to be machined. We are also leaving 16 flexures here with Jim. The pico motor controller chassis was not working, so we are leaving our UW picomotor driver (Newport 8742) here so that the End-X BRS can be adjusted until the chassis is fixed. Once it is fixed the in-air wiring will need to be re-connected to get the motor to the chassis. For now adjusting will have to be done with a laptop at the End-X station, but once hooked up to the chassis, adjustments can be made from the control room.
Images attached to this report
Comments related to this report
Yeah! Jim's back will be grateful.
Notes about the design and additional details on the installation are in SEI log 1886 and attachments.
Tagging EPO for these new BRS innards photos.