Jennie W, Sheila, Matt Todd, Trent Gayer, Craig
Summary: Measured summing of QPDs on OMC and remeasured the sensing matrix and updated the input matrix for the OMC ASC. We also locked the OMC with no sidebands and took an OMC scan. The AS loops look good but we might need to check the summing of the QPDs offline as we weren't sure if the yaw quadrant summing of QPD B has the correct sign.
First we checked that the quadrants of the two OMC QPDs are summed the correct way.
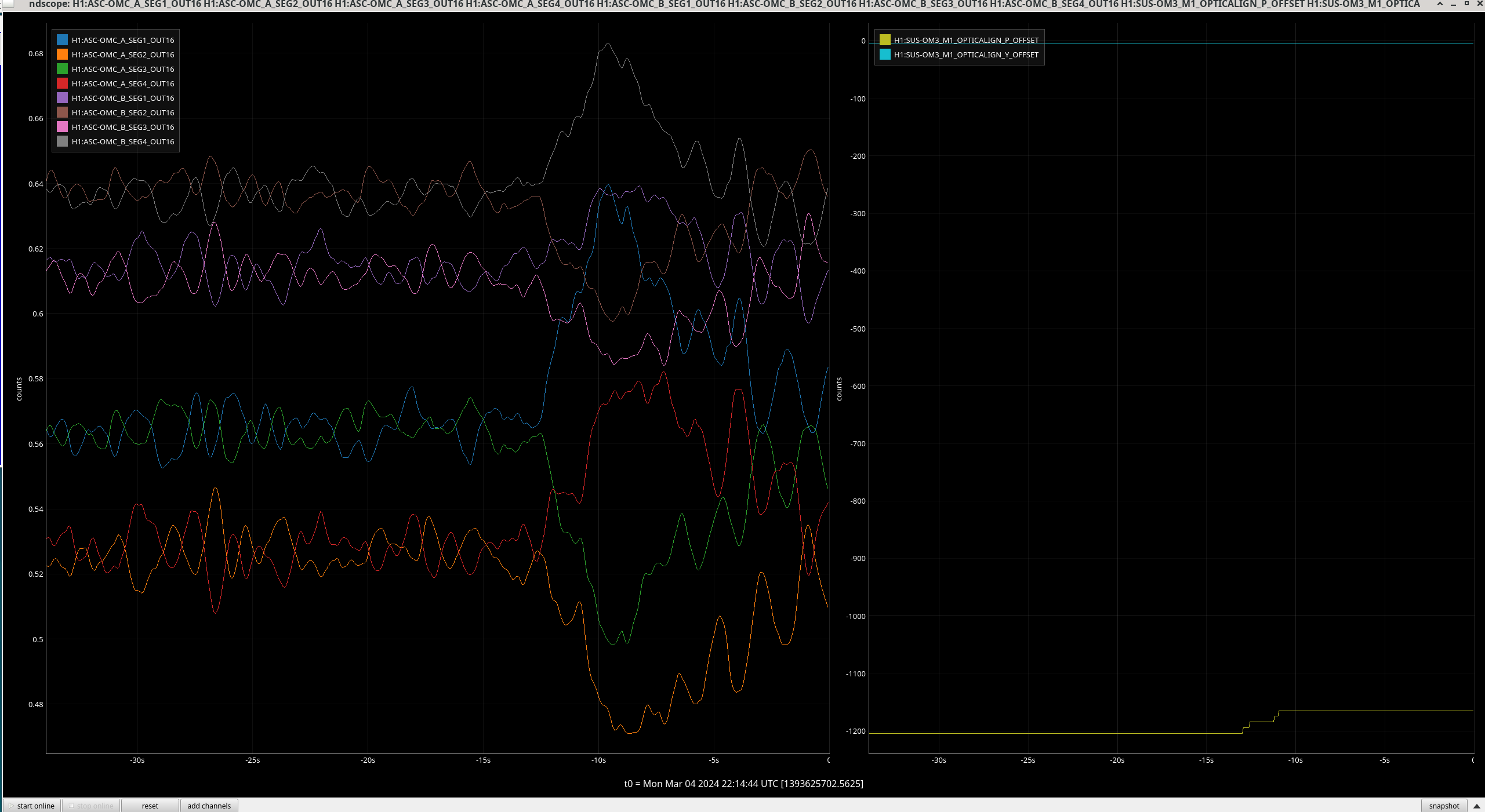
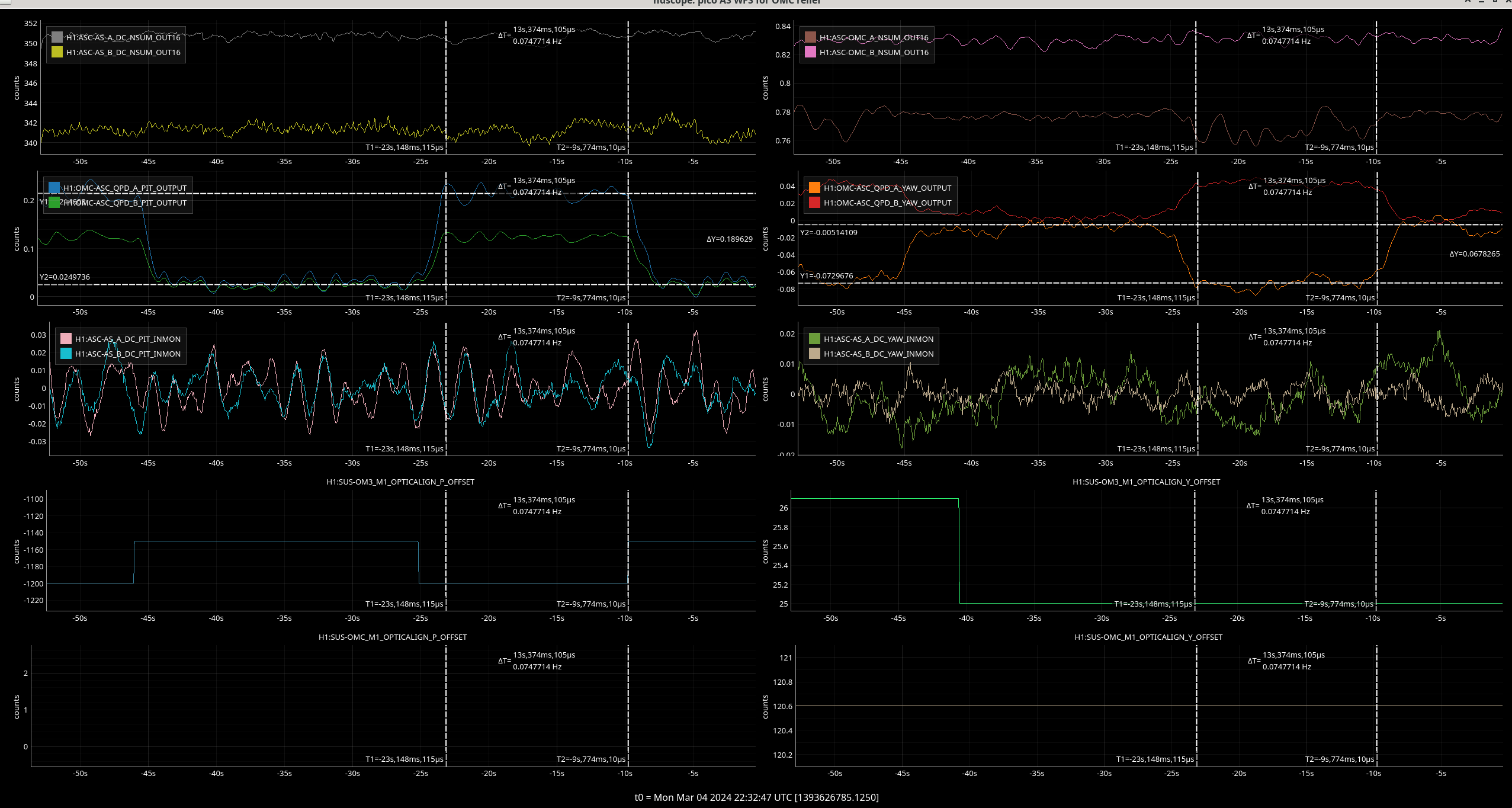
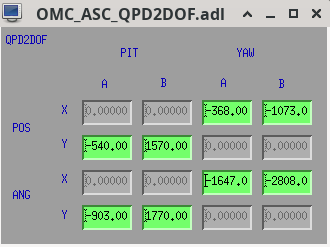
When OM3 pitch is stepped up, as in image 1:
- the quadrant 1 and 4 increase and 2 and 3 decrease. This is the same for both QPDs.
- Though the A QPD responds more to OM3 than B which should be the correct way round.
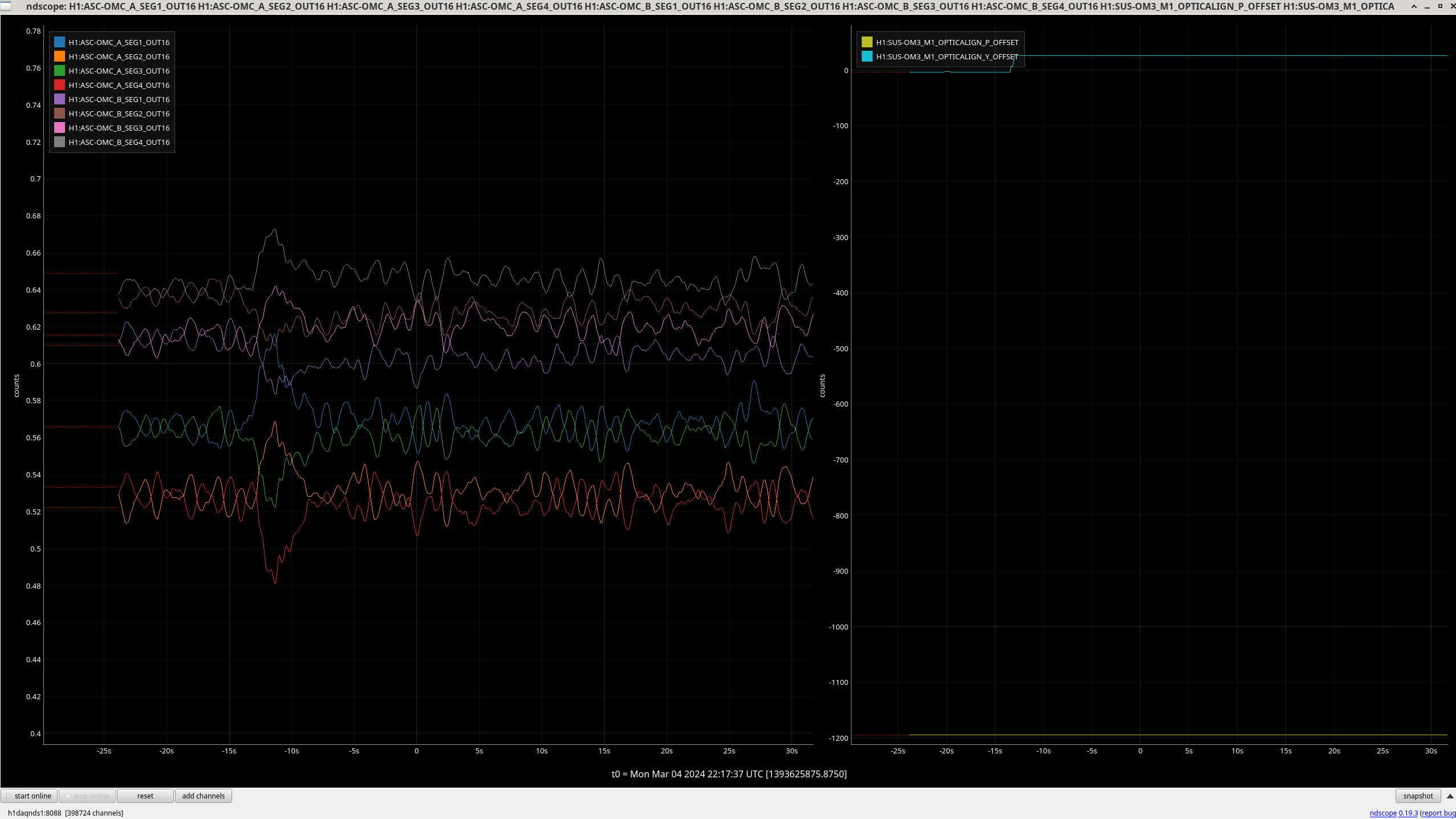
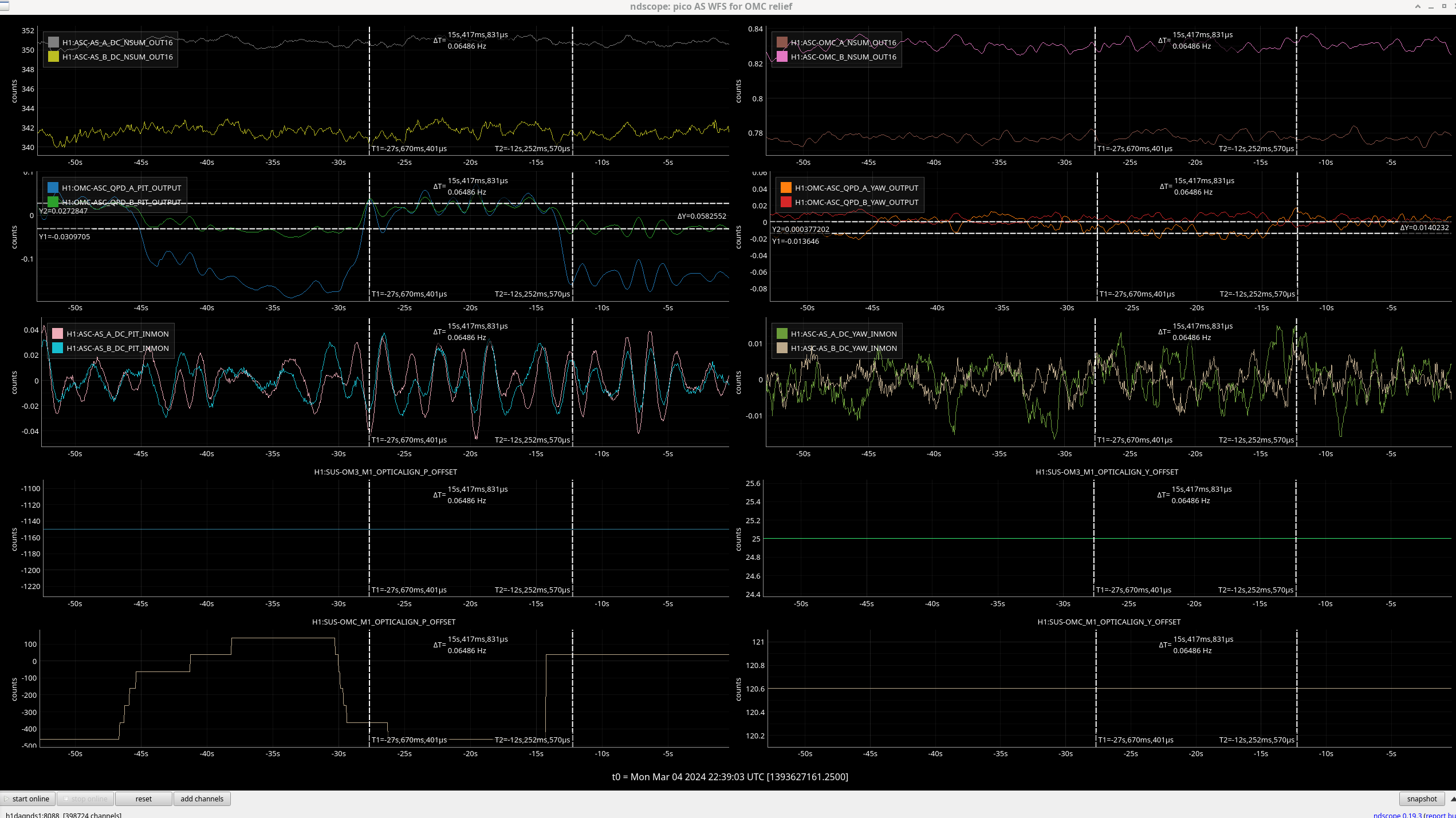
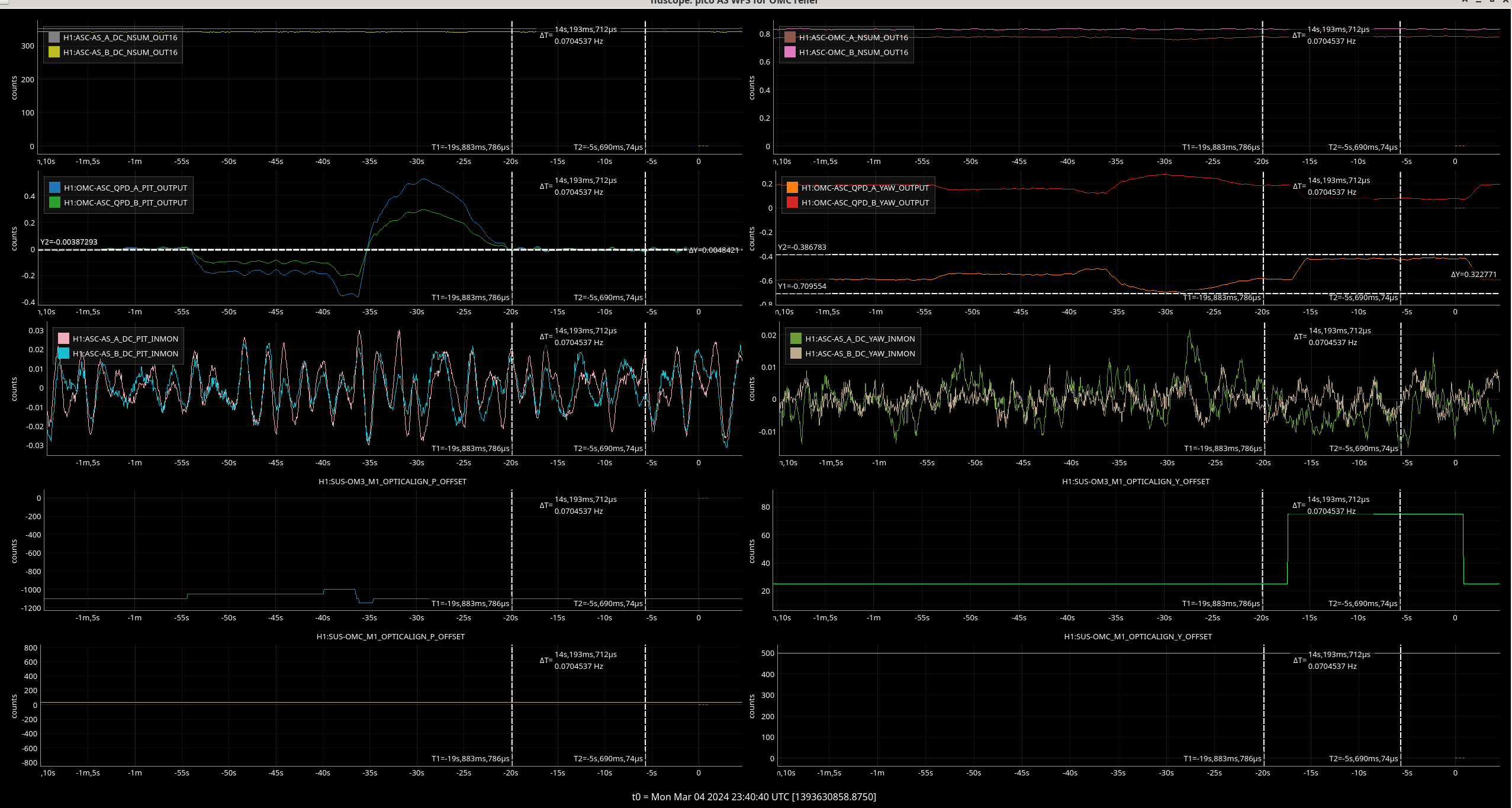
Image 2 shows the same thing when we increase the yaw signal on OM3 segment:
- 1 and 2 increase and segment 3 and 4 decrease for QPD A.
- 1 and 2 decrease and segment 3 and 4 increase for QPD B.
- As for pitch the response of QPD A seems slightly less sensitive to OM3 than B which we expect.
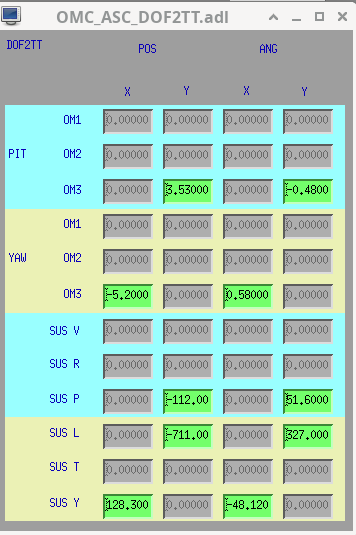
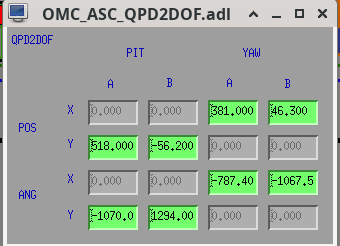
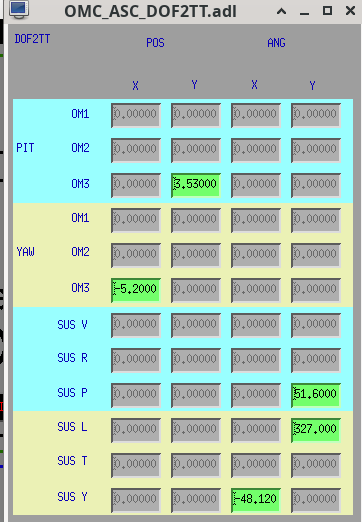
See image 3 and 4 for the original input and output matrices for the OMC ASC before our measurements started today.
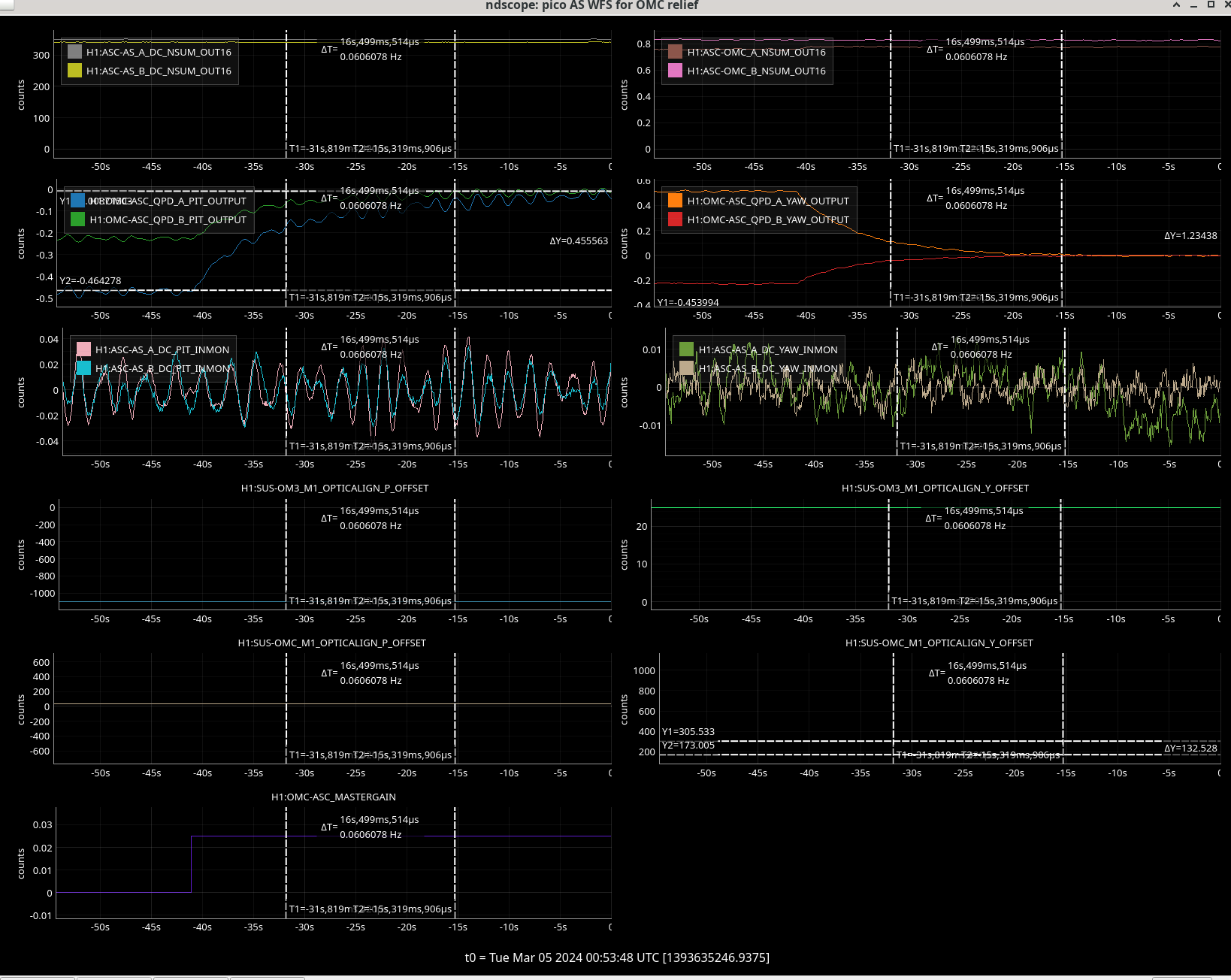
We measured the sensing matrix from pitch of OM3 to pitch and yaw of A and B by moving OM3 up in pitch by 50 counts. See image 5. You can see here that yaw on the QPDs is cross-coupled to pitch which we ignore for the purposes of this analysis but is good to note.
We measured the sensing matrix from pitch of OMC to pitch and yaw of A and B by moving OMC up in pitch by 500 counts (as it was hard to see a rerponse for 50). See image 6.
For both we divided the step on the QPD by 50, this might make the matrix coefficients differently scaled but we can fix this later by changing the loop bandwidths if neccessary.
This must be done with the ASC off so the step response can be seen.
Then we inverted this sensing matrix to get the input matrix after zeroing the output values for ANG Y and OM3 and POS Y and OMC sus.
We also have changed the output matrix in pitch to feedback only to feedback to OM3 for POS DOF and OMC only for ANG DOF to simplify the loops. See image 7.
Next we measure the yaw with steps of 50 counts again in the same way. Shown in image 8 and 9.
Then we changed output to decouple yaw drives as for pitch so pos drive only goes to OM3 and ANG drive only to OMC sus.
Then Craig and Matt had to re-measure the OMC in yaw as had measured the OMC offset drive wrongly.
The new input matrix after inverting our sensing matrix for yaw and scaliing it by a factor of 50 is shown in image 10.
New output matrix (no value changes, just turned off POS feedback to OMC sus and ANG feedback to OM3) is shown in image 11.
ASC now converges. Image 12 shows it working.
Matt locked the OMC with ASC on shown in image 13.

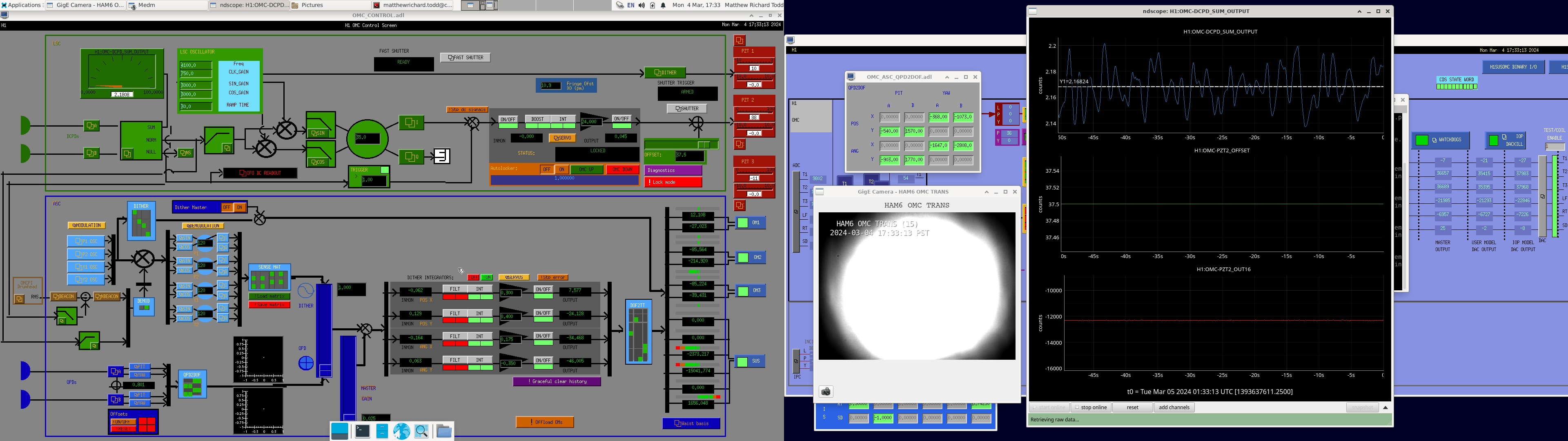
I've put in a "fake dark offset" OMC DCPD A to make the data from the OMC scans never be less than zero. This is still engaged at the moment.