[Jennie, Gabriele]
We tried again to move the input beam.
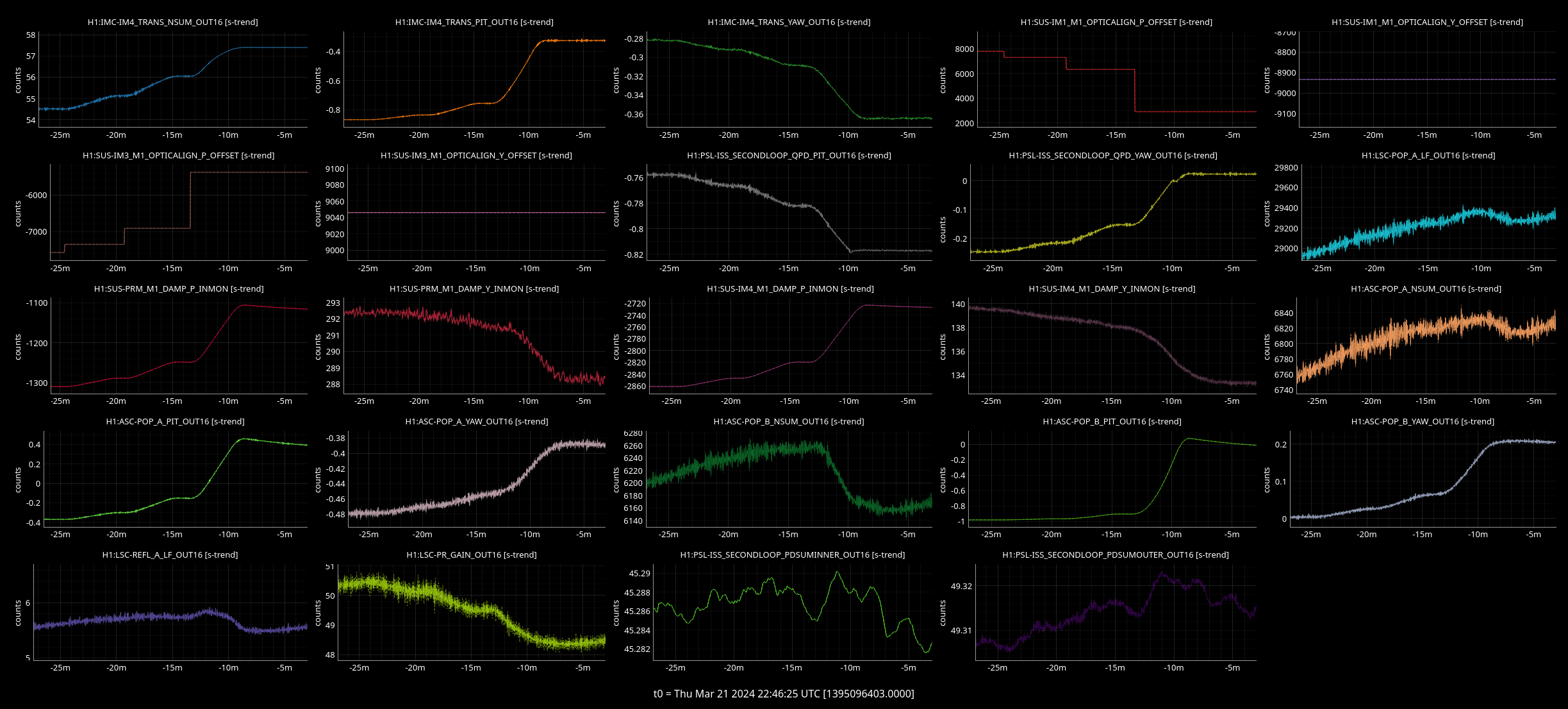
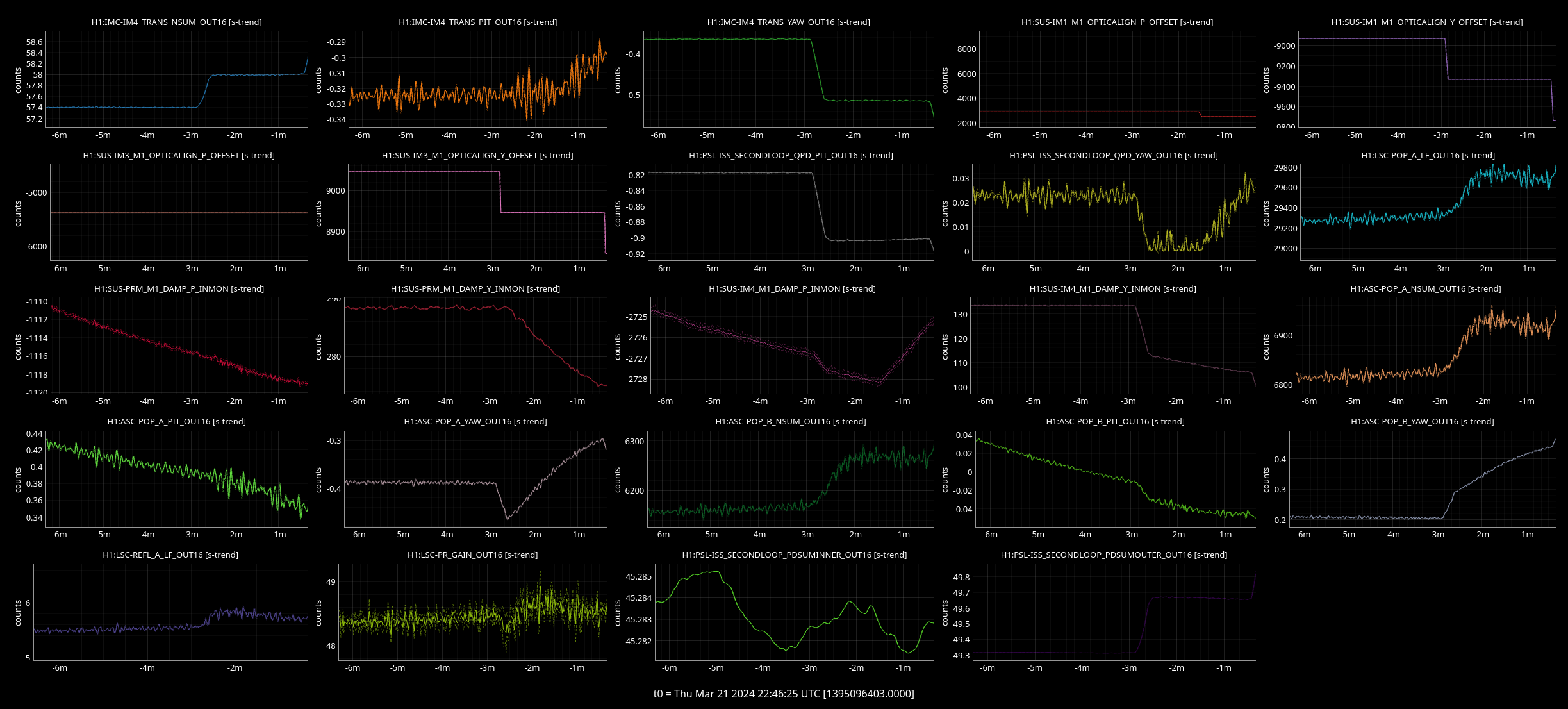
For pitch, we directly ramped IM1, IM3, IM4, PRM and PR2 with sliders deltas measured from the test yesterday. IM1 and IM3 were the mirrors we move yesterday, while the other were moved by ASC loops. Today with the ramp we helped the ASC loops by moving those mirrors in the right direction too. We first diod one step 1/10th of the target step, then 2/10th and then the remaining 7/10th. All went well: IM4_TRANS increased, but we did not see much change in POP_LF. However ASC-POP_B dropped near the end of the ramp, while ASC-POP_A didn't, so maybe we were moving near the edge of B.
We then started a motion in yaw (both IM1 and IM3 negative). This seems a very good direction, and both IM4 and POP_LF got better quickly. However, right after we started the second step, we lost lock. This is similar to what happened in the previous test. We should probably move more slowly in yaw, but it worth repeating the test, since we are gaining power in POP_LF and arms.

During a previous alignment test aimed at reducing jitter (76461) we observed that a yaw input beam PZT excitation had the largest coupling to DARM. This is consistent with the observation here that a yaw motion of the input beam has a large effect on build-ups. We might have a yaw misalignment of the input beam.
I think we normally use a pitch IMC signal to subtract jitter, but both yaw and pitch IMC signals are coherent with DARM, so probably that's not telling us much and it is still consistent with a yaw misalignment.
During the pitch beam motion, we noticed that the PRM camera servo seems to overshoot the optimal buildups: so we might have to retune the camera offset once we find a better input beam aligment