In previous aLOG https://alog.ligo-wa.caltech.edu/aLOG/index.php?callRep=7620, the transmissibility (stage 0 of the ISI to stage 2 of the ISI) was computed using HEPI L4Cs as input motion. Due to a zero in some transfer functions from the HEPI actuators to the HEPI L4Cs, there is in Y transmissibility and Z transmissibility a sharp pole around 30Hz. The motion seen by the HEPI L4C around 30Hz is probably not representative of the actual input motion of stage 0. When driven by the HEPI, the motion should be falling in 1/f after 50mHz.
I used fitted transfer functions from the HEPI actuator drives to the HEPI L4Cs and the transfer functions from the HEPI actuators to the GS13s to compute the “ideal transmissibility”.
In attachment, figures show:|
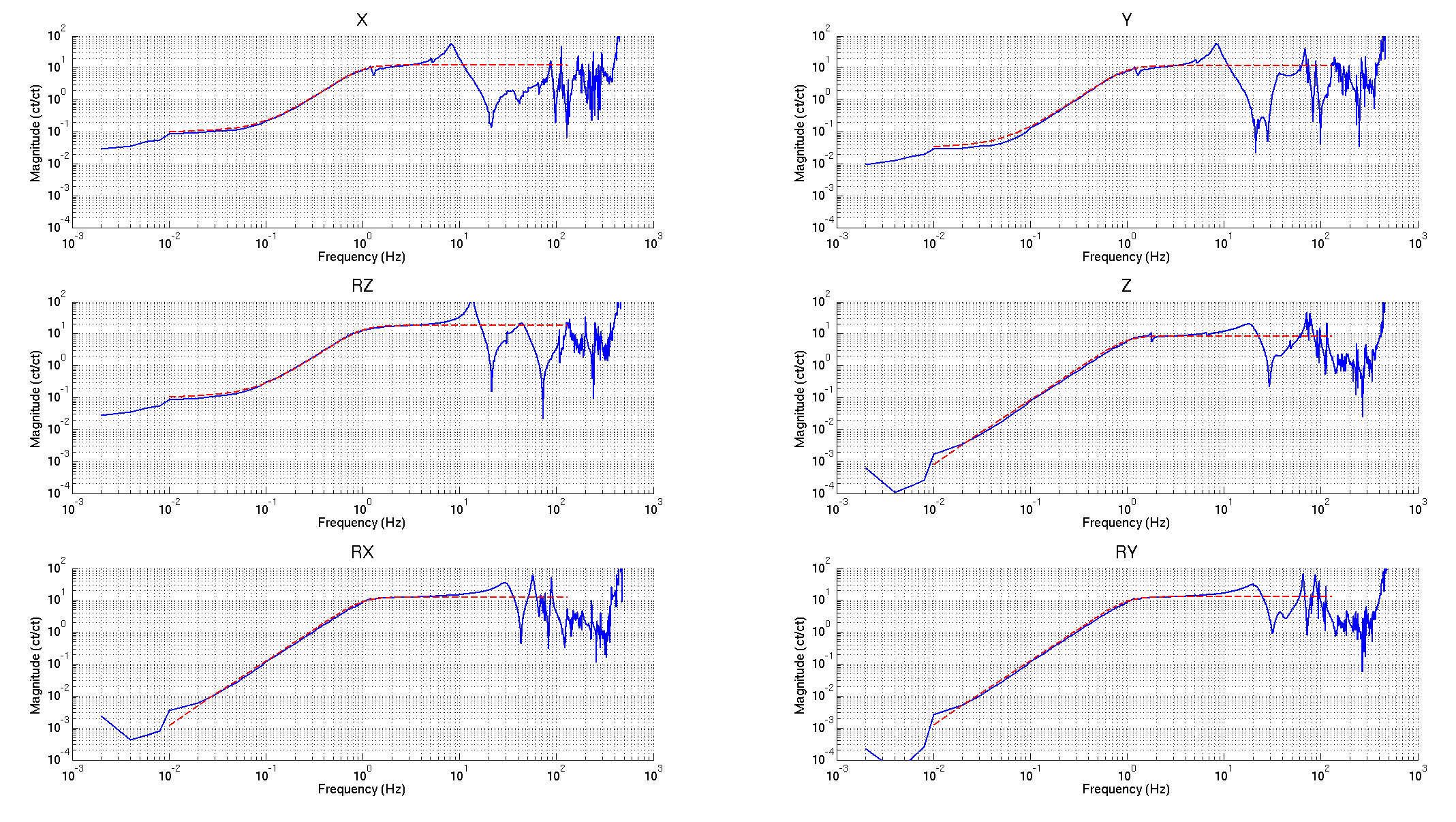
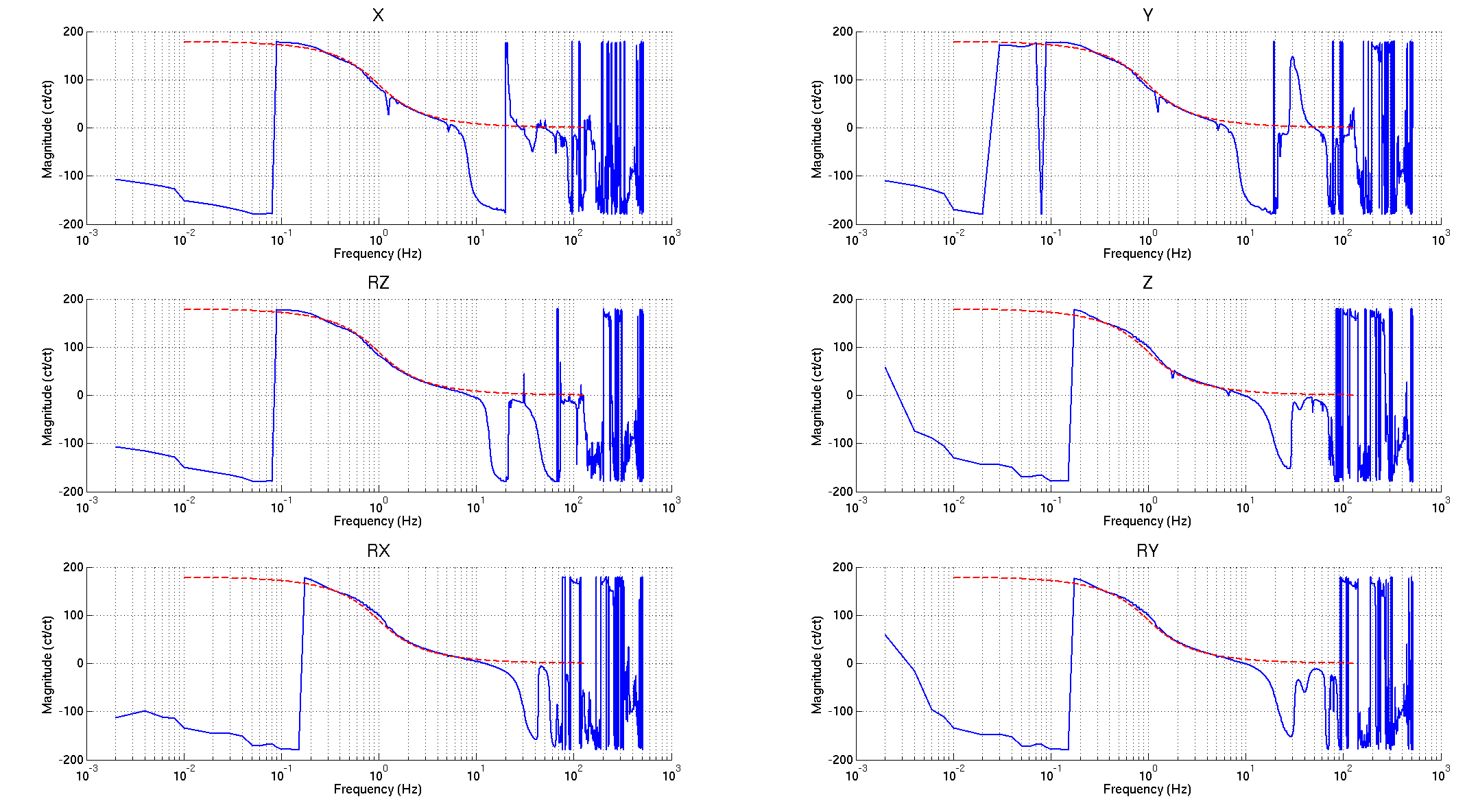
- The fitted transfer functions (magnitude and phase) to correct the input motion
- The transmissibility using the L4Cs as an input motion
- The transmissibility using the HEPI actuator drives and the Ideal response as input motion
When the HEPI dynamic is removed, the large transmissibility at 30Hz in Y and Z is considerably reduced.