Sheila, Camilla
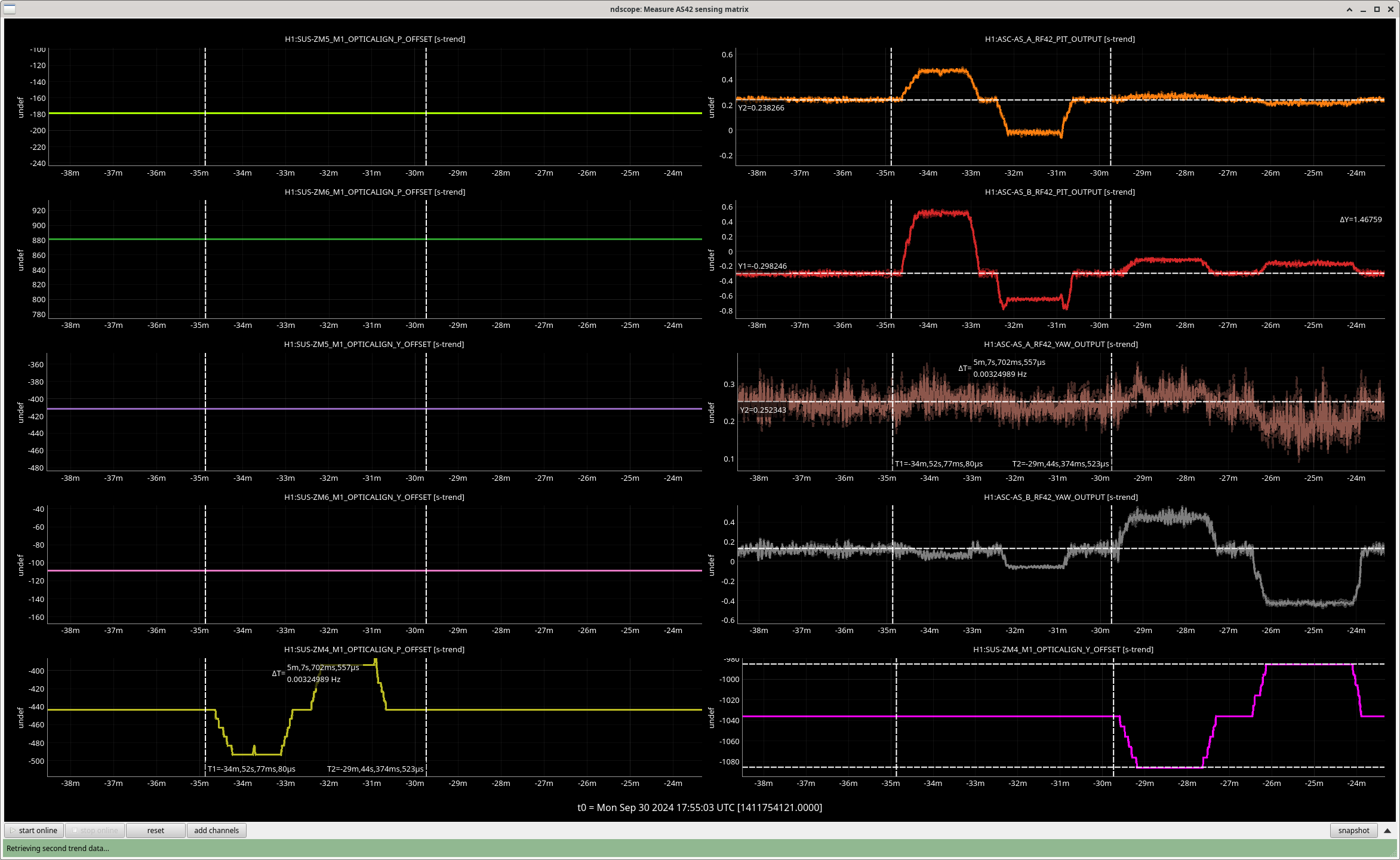
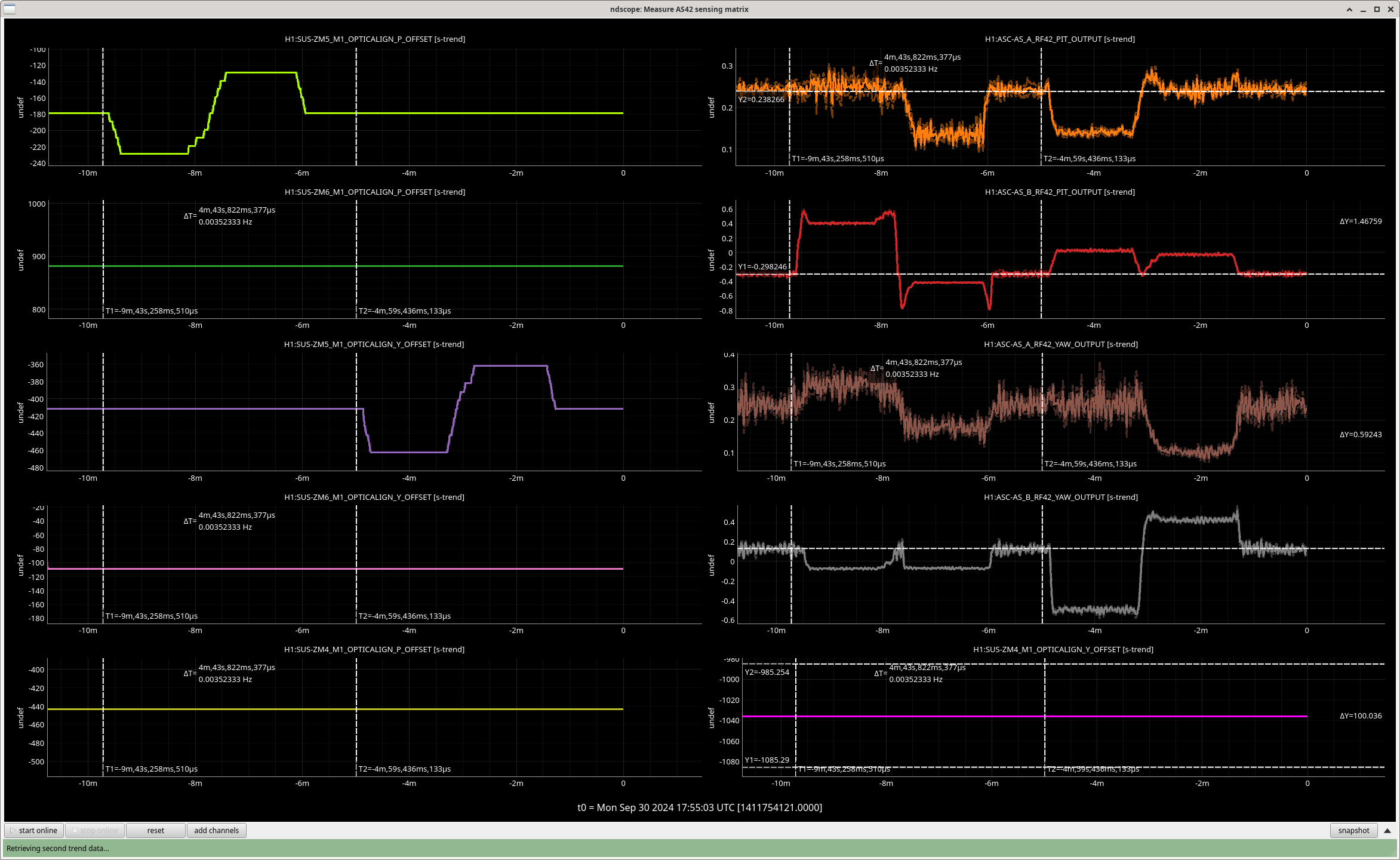
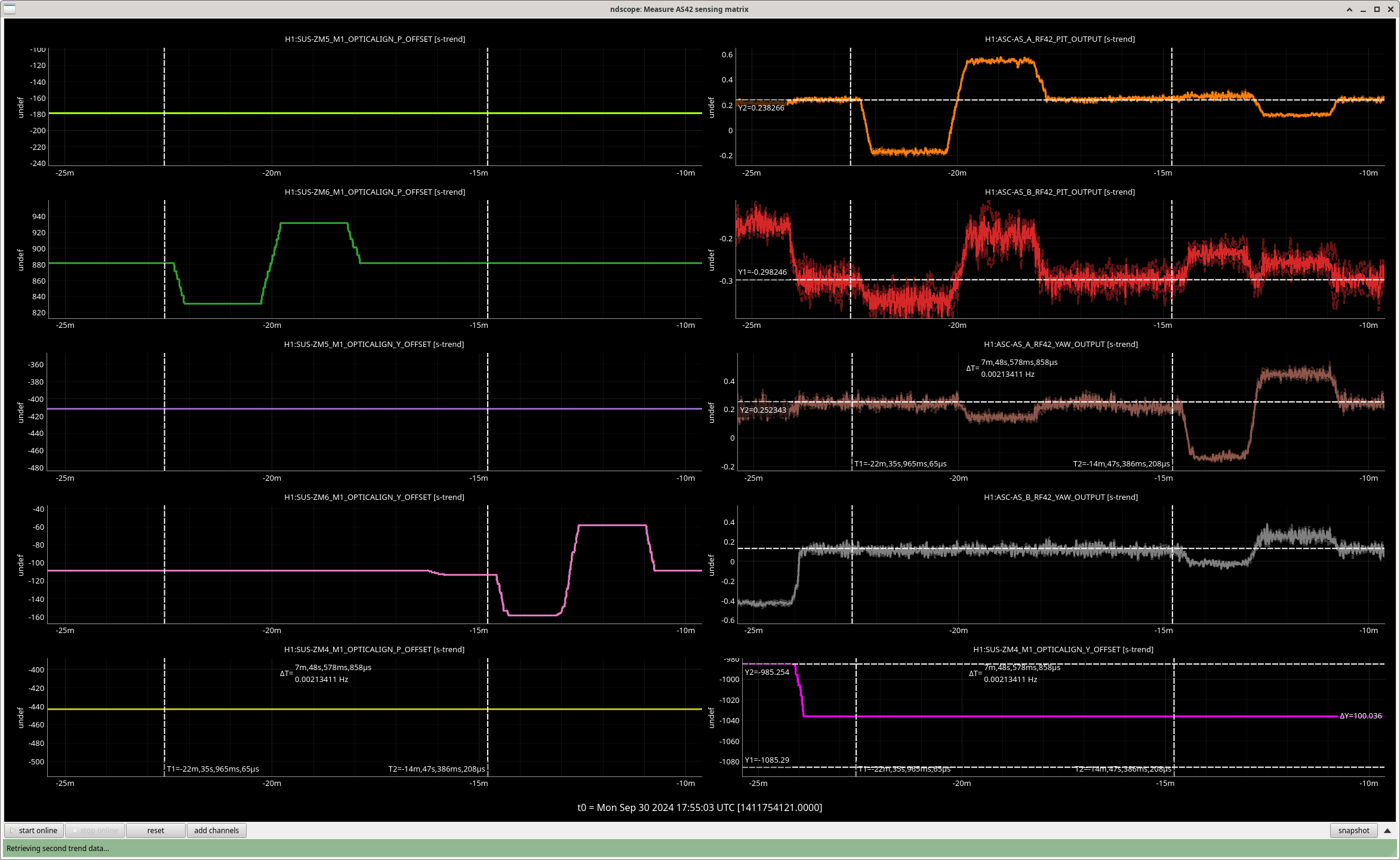
As Naoki/Vicky started, I moved ZM4,6,5 -50urad and then +50urad and recorded change in AS_A/B_AS42_PIT/YAW. It may have been easier if I'd changed AS_A/B AS42 offsets to have PIT/YAW outputs zero'ed to start with...
Plot attached of ZM4, ZM5 and ZM6.
There is a some cross coupling, and ZM5 gave very strange results in pitch and yaw with overshoot and the same direction of AS42 recorded with a different direction of alignment. This suggests we should use ZM4 and ZM6 as we do for our SCAN_SQZ_ALIGNMENT script.
Sensing/Input matrices calculated using /sqz/h1/scripts/ASC/AS42_sensing_matrix_cal.py
Using ZM4 and ZM6.
PIT Sensing Matrix is:
[[-0.0048 -0.0118]
[ 0.0071 0.0016]]
PIT Input Matrix is:
[[ 21.02496715 155.05913272]
[-93.29829172 -63.07490145]]
YAW Sensing Matrix is:
[[-0.00085 -0.009 ]
[ 0.0059 0.0029 ]]
YAW Input Matrix is:
[[ 57.2726375 177.74266811]
[-116.52019354 -16.78680754]]