FranciscoL, SheilaD
Changed H1:SUS-ETMX_L3_DRIVEALIGN_L2L_GAIN by 3.63 % using KappaToDrivealign.py at gps 1417450784.
Script output:
Average H1:CAL-CS_TDEP_KAPPA_TST_OUTPUT is -3.6267% from 1.
Accept changes of
H1:SUS-ETMX_L3_DRIVEALIGN_L2L_GAIN from 191.711517 to 198.664299
Proceed? [yes/no]
yes
Changing
H1:SUS-ETMX_L3_DRIVEALIGN_L2L_GAIN
H1:SUS-ETMX_L3_DRIVEALIGN_L2L_GAIN => 198.6643
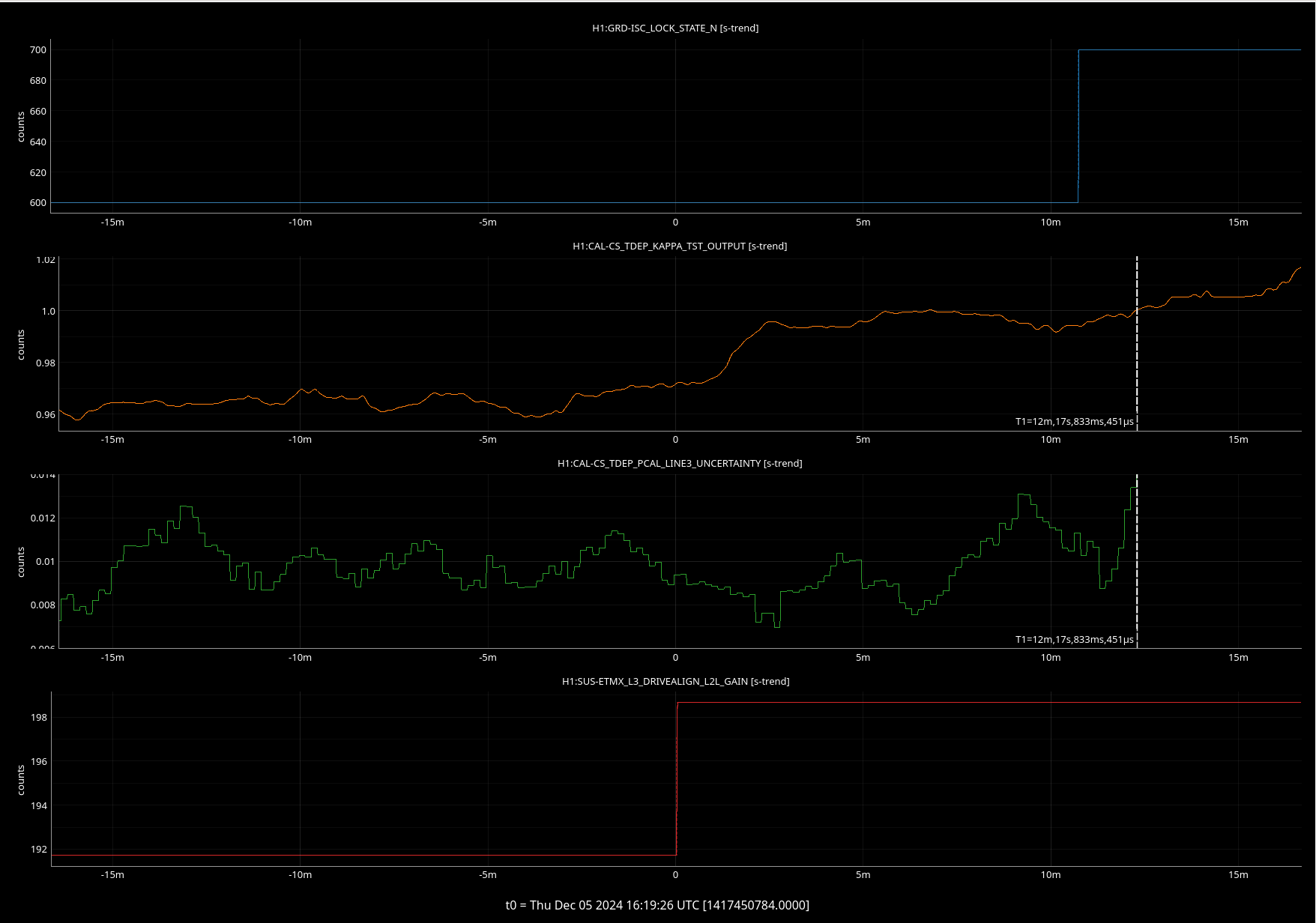
First figure (kappa2drivealign_ndscope) is an ndscope of the relevant channels. The the second plot (top to bottom) is CAL-CS_TDEP_KAPPA_TST_OUT with a verticar marker aligned at a time where the uncertainty from CAL-CS_TDEP_PCAL_LINE3_UNCERTAINTY (third plot) increased. This increase in uncertainty is expected from turning off lines before calibration measurement.
KAPPA_TST_OUT is around 1 from minute 5 to the marker, which is the objective of changing the drive gain.
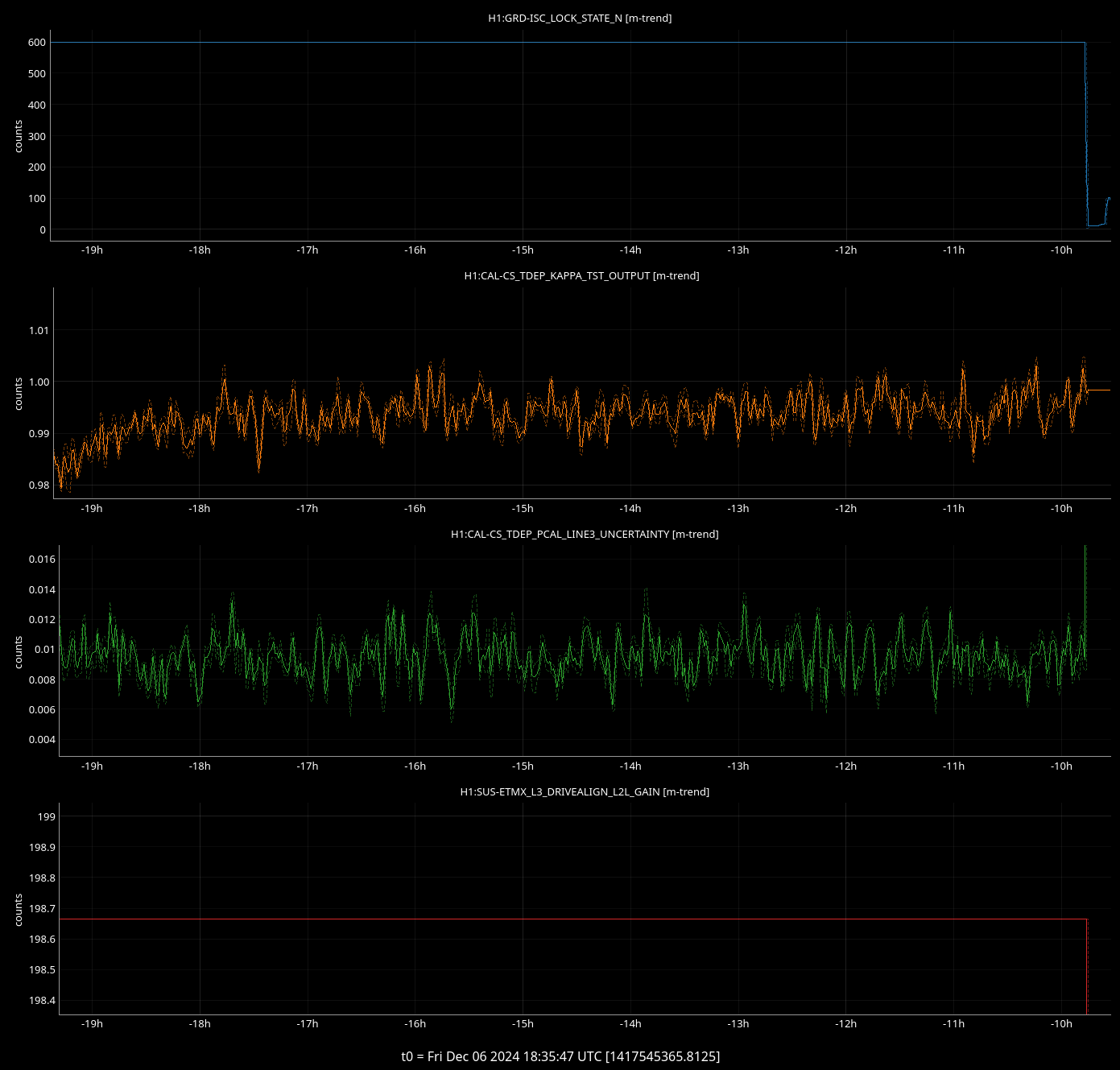
Attaching trend of CAL-CS_TDEP_KAPPA_TST from long lock stretch after changes.