fabrice.matichard@LIGO.ORG - posted 22:15, Thursday 24 October 2013 - last comment - 22:19, Thursday 24 October 2013(8257)
HAM 2 tilt decoupling
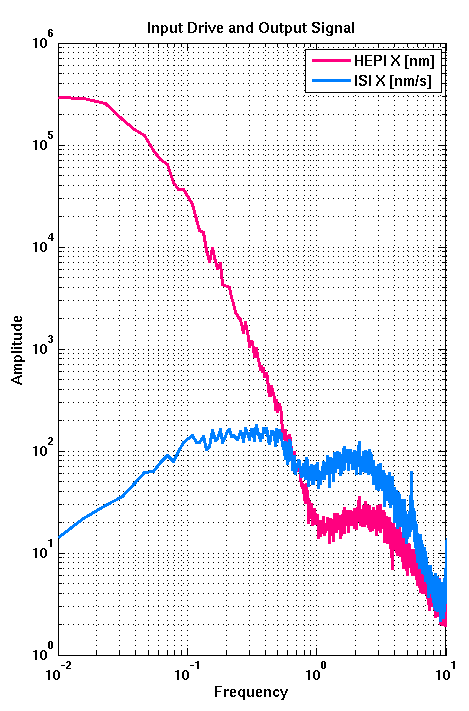
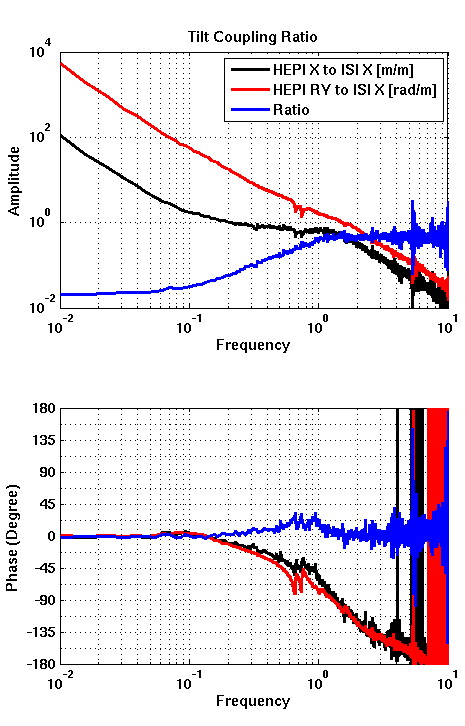
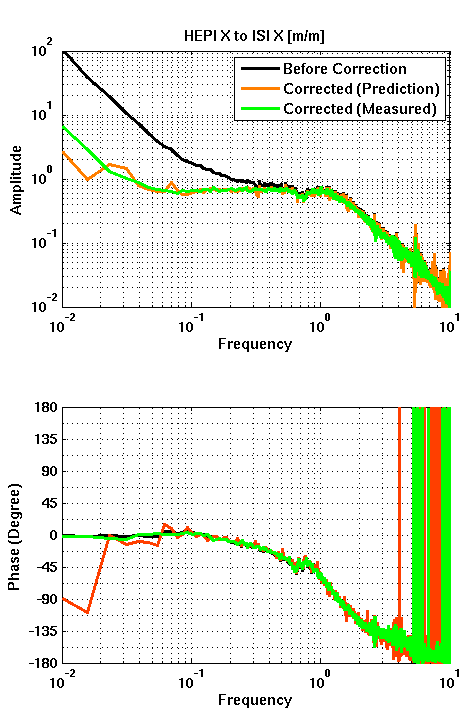
- The data necessary for tilt decoupling has been taken using white noise excitation. Filtering and amplitude parameters have been defined in order to whiten the output signal and increase the SNR. Each transfer function can now be acquired in about 5 to 10 minutes, even during day time and purged air running (versus ~hours with our previous comb parameters). - The first picture shows the spectra of the input drive, and the corresponding output spectra during this white noise transfer function measurement. The input is the HEPI motion in the X direction driven at the controller error point. The RMS value of the drive is approximately 50 um. The time series show peaks around 150um. The output is the ISI inertial sensor response in the same direction. - The second plot shows the transfer function from the HEPI X motion drive to the ISI GS13 response. It also shows the response for the RY drive that is used to decouple as in a feed-forward scheme. The low frequency part of the two transfer functions is dominated by tilt coupling. The ratio of the two transfer functions at very low frequency is calculated and installed in the MEDM matrices to decouple X and RY. - The third plot shows the tilt coupling before correction, the expected decoupling and the measured decoupling. Results look good. We can start working on sensor correction tomorrow.
Images attached to this report
Comments related to this report
Side note: the transfer function amplitude below 1 Hz should be closer to 1. We need to check HEPI calibration.