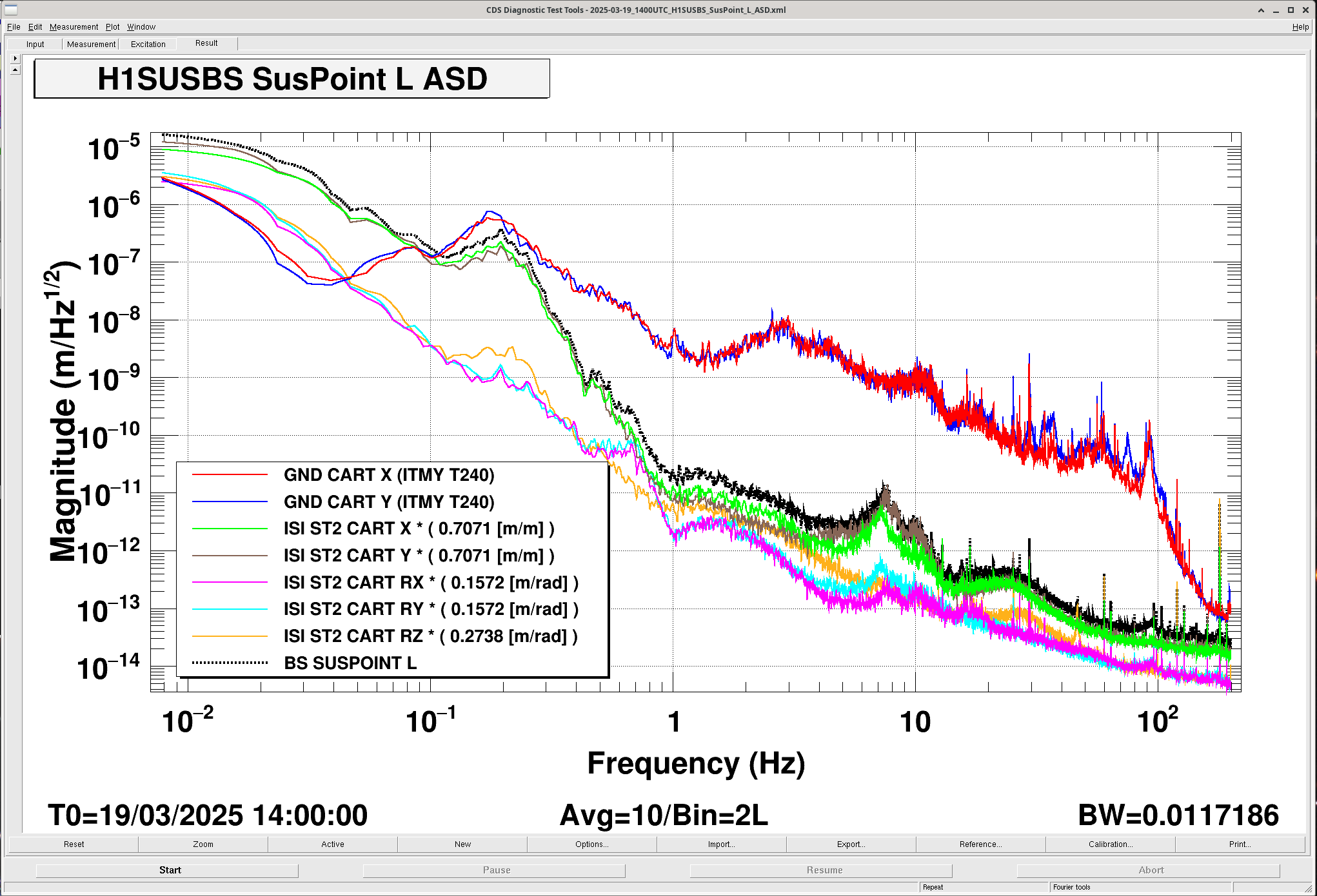
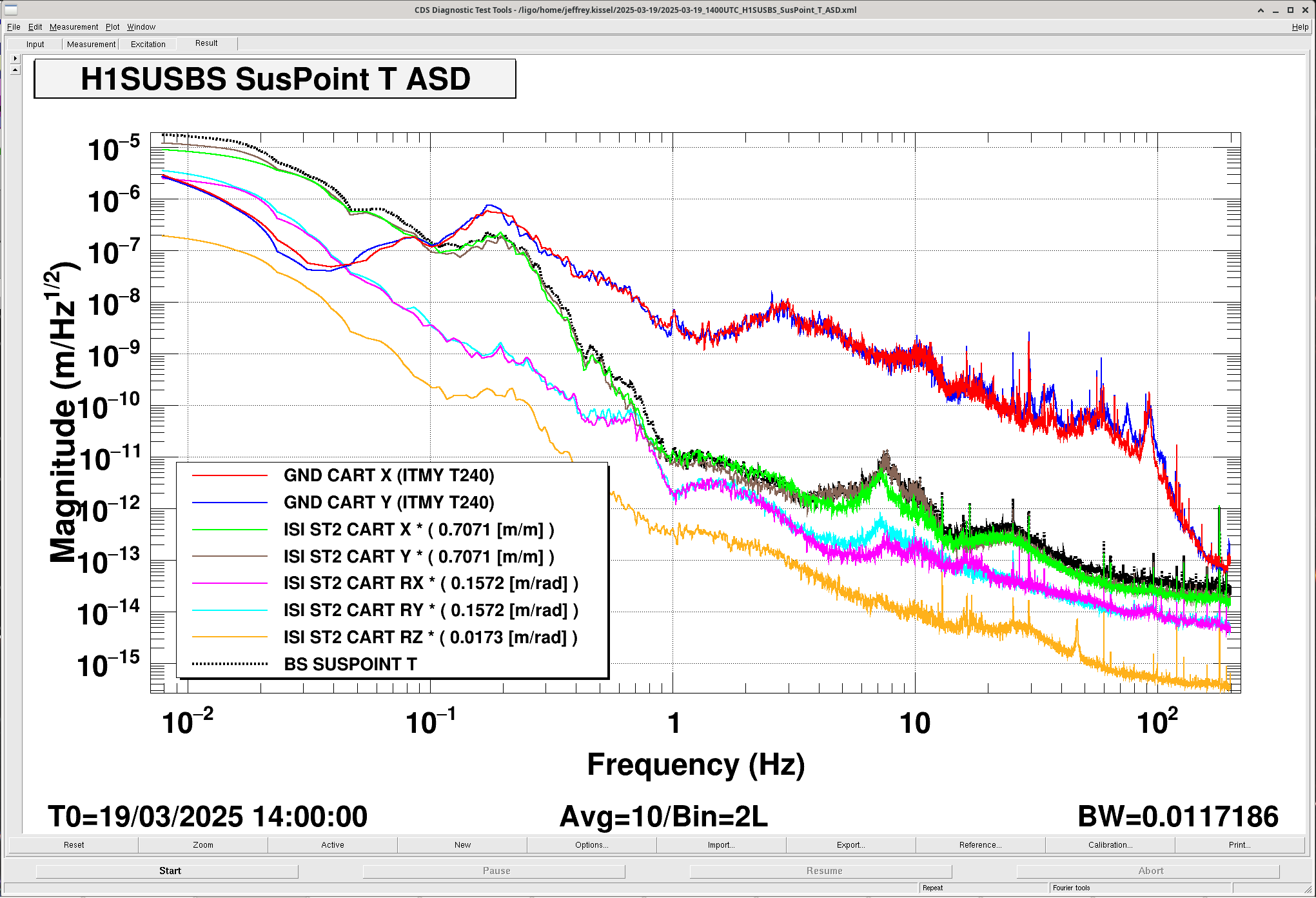
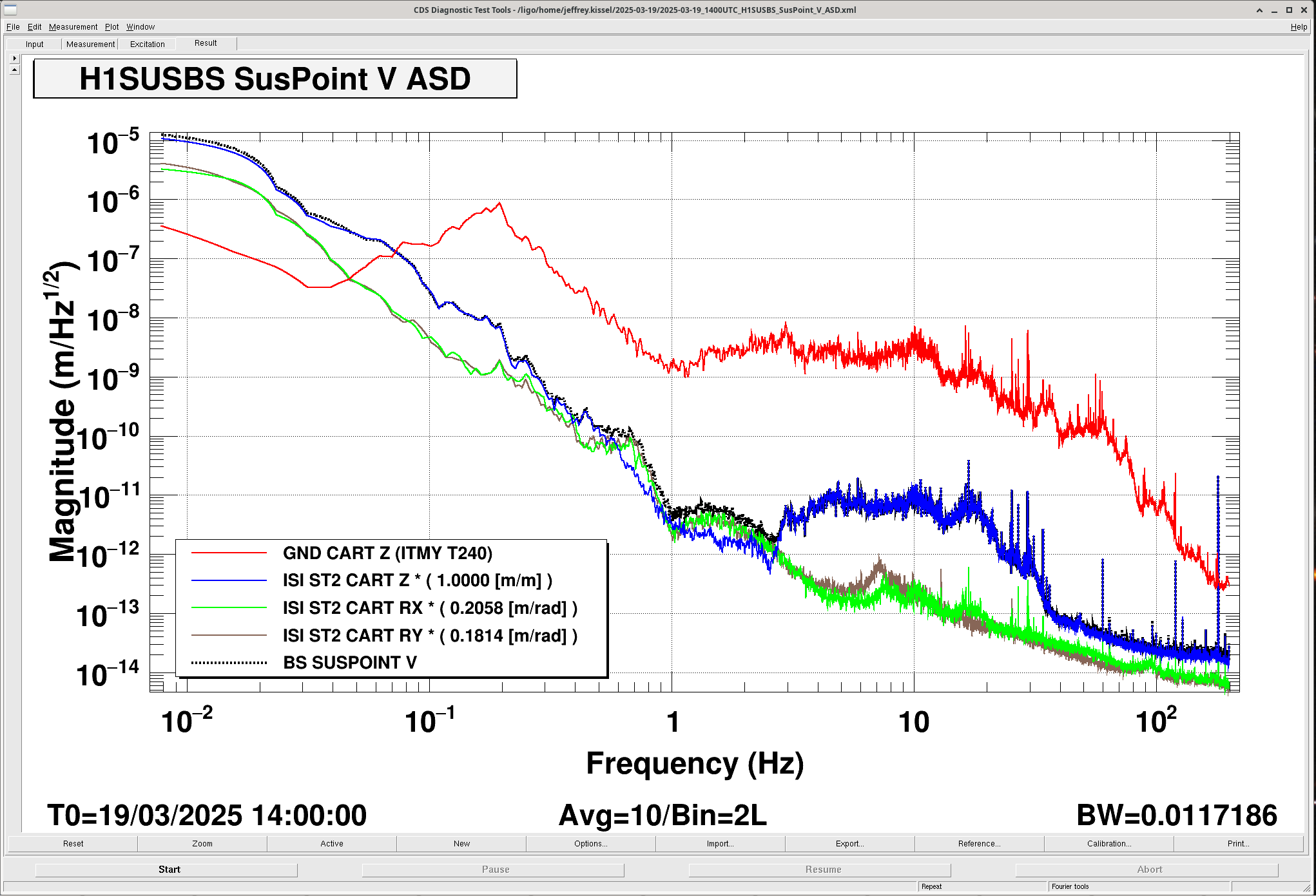
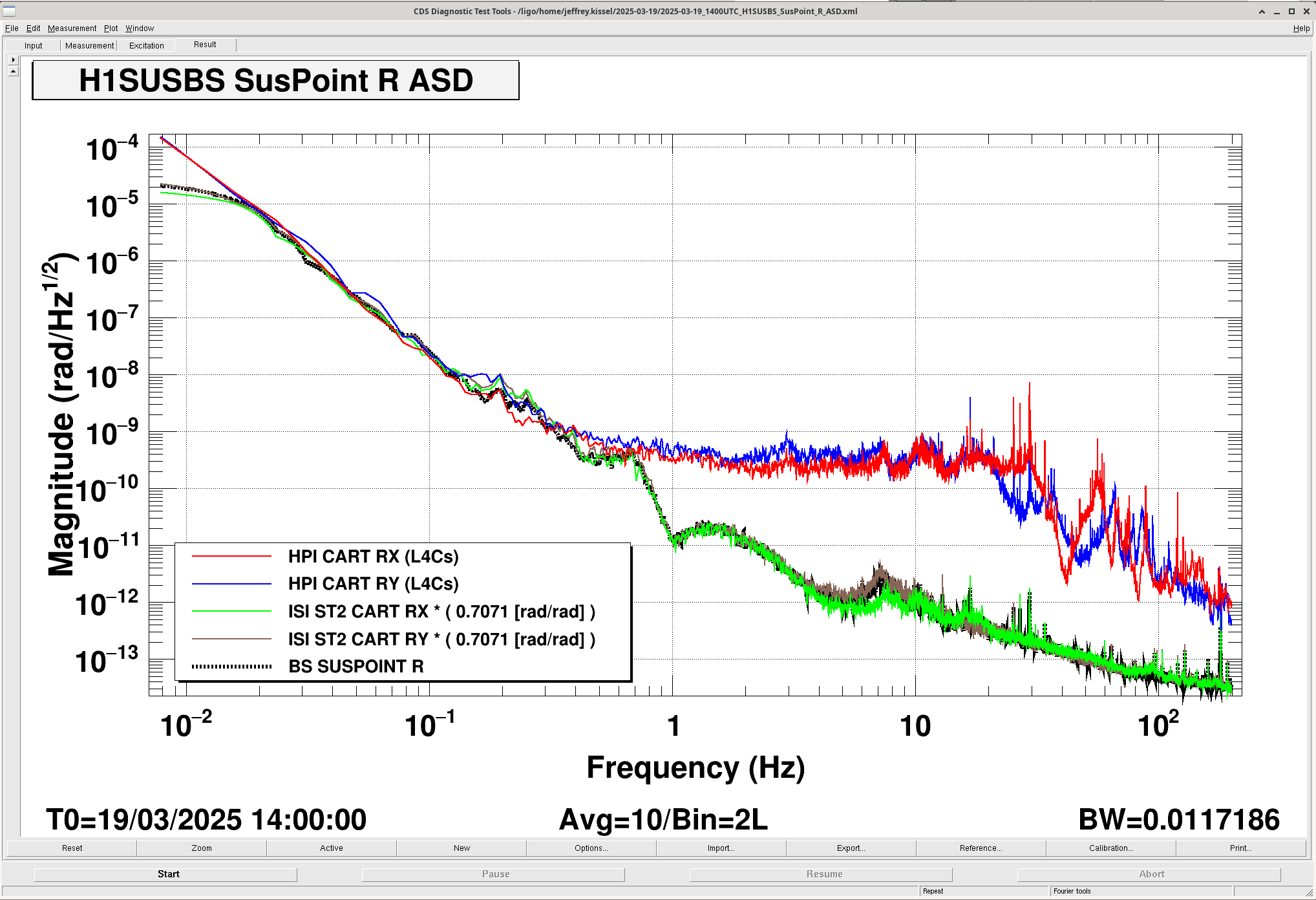
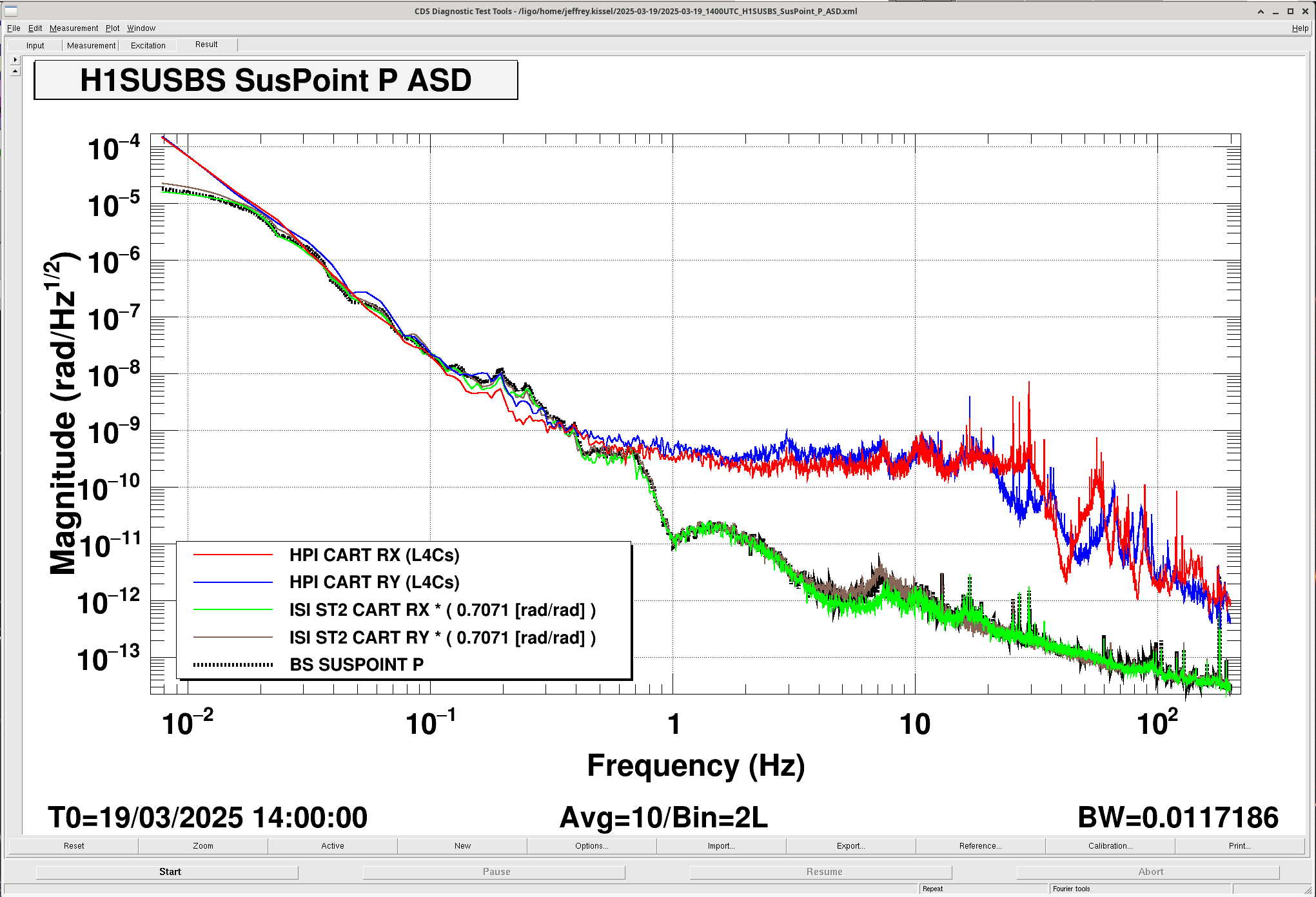
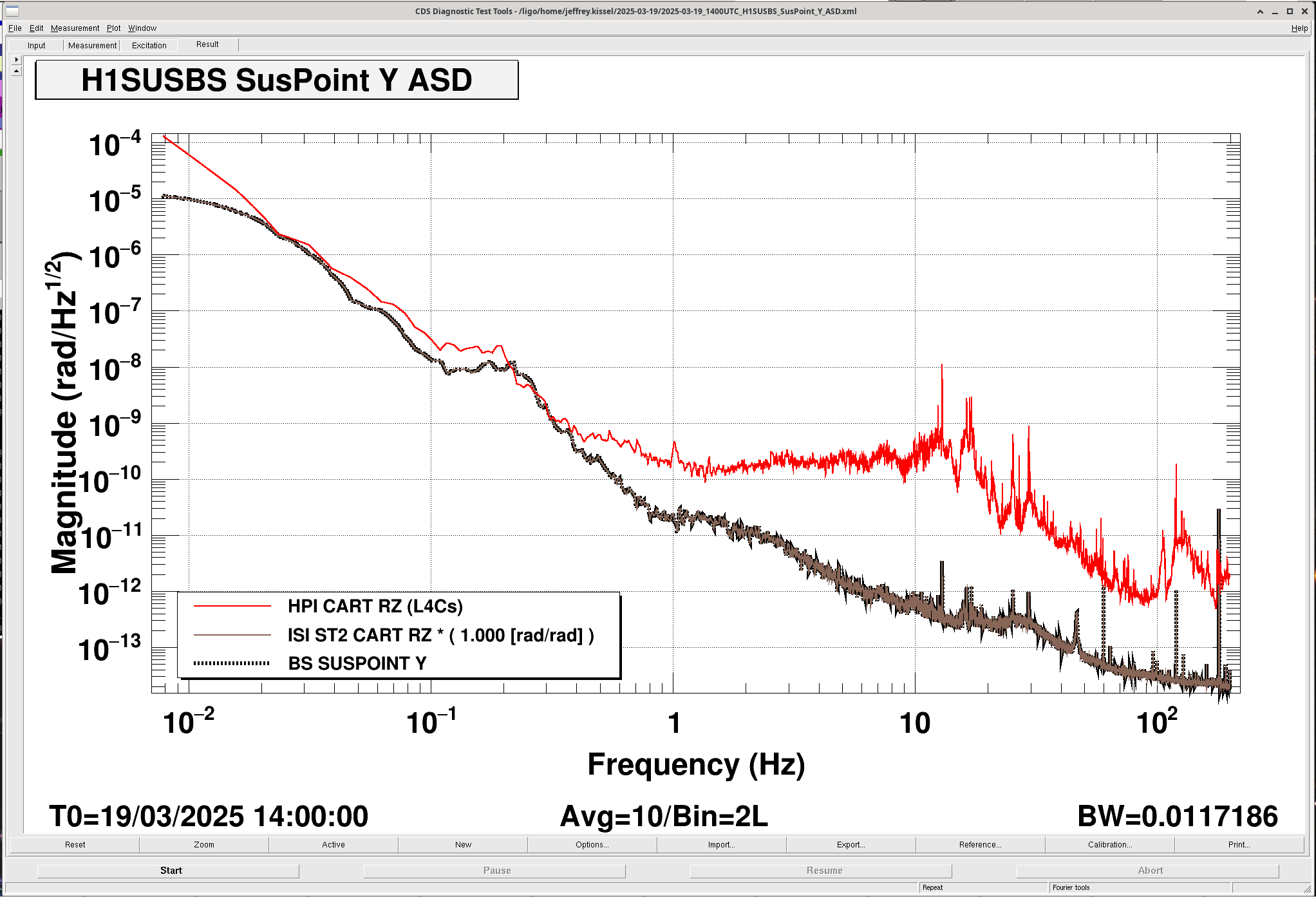
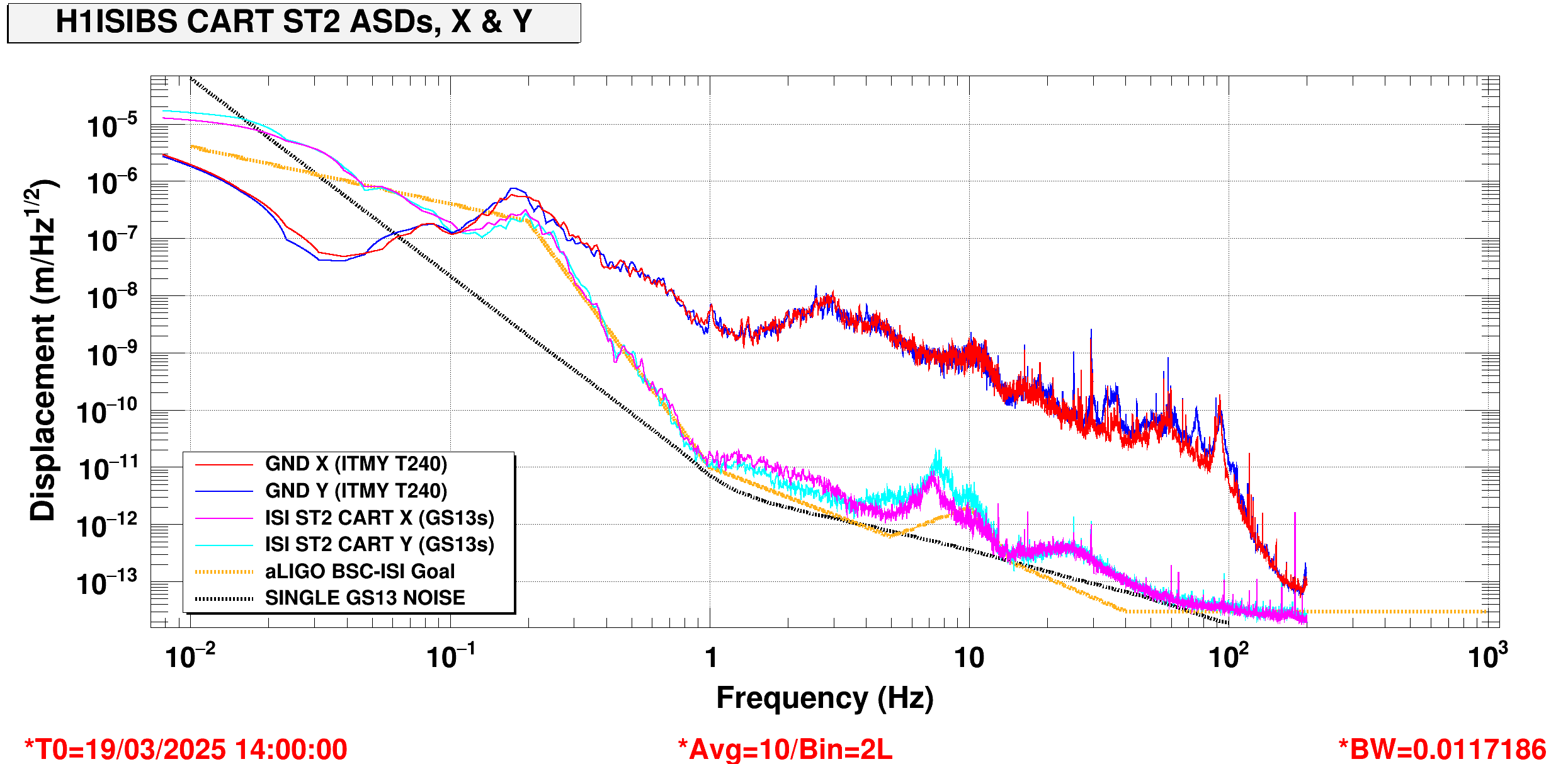
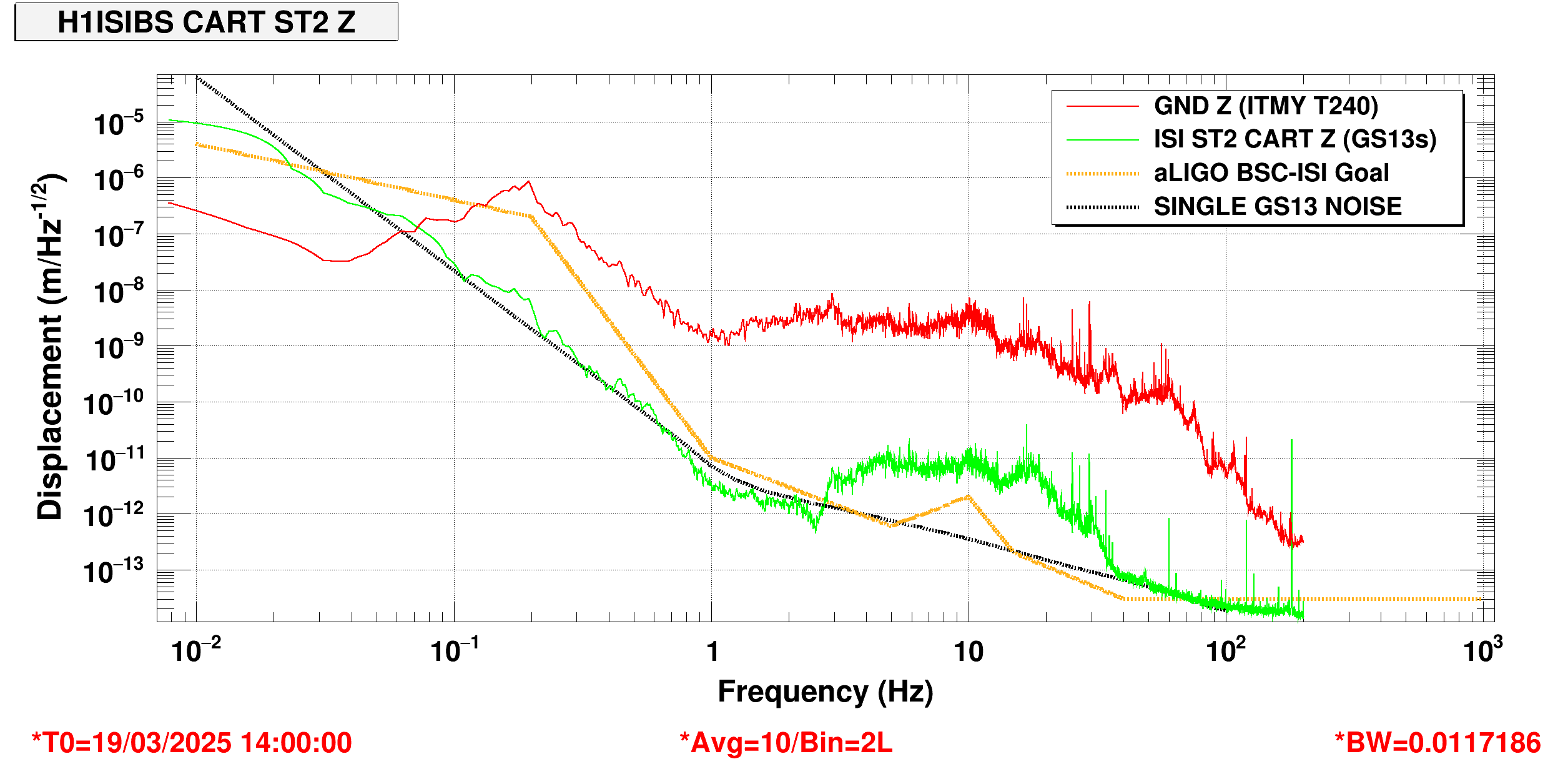
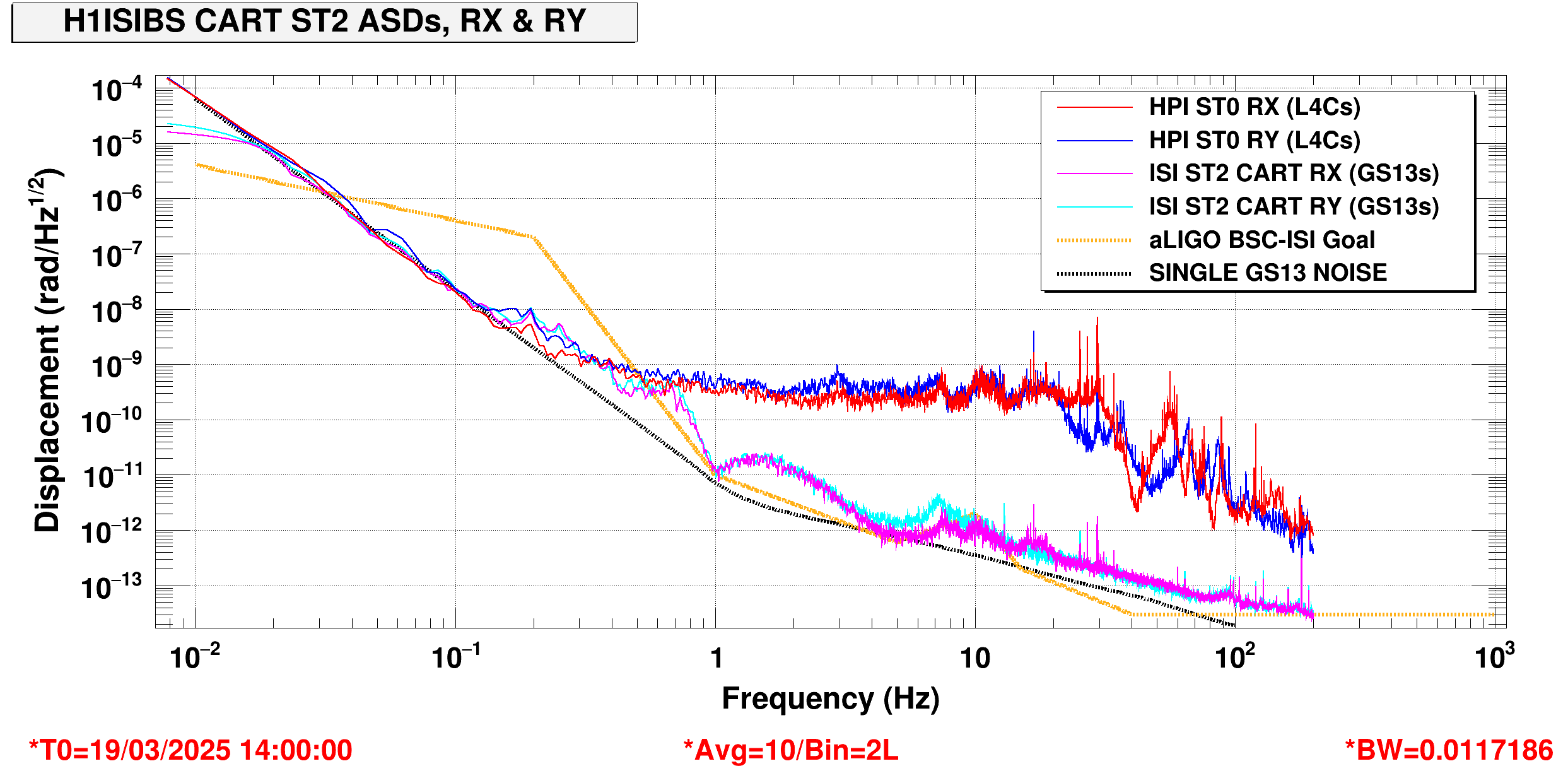
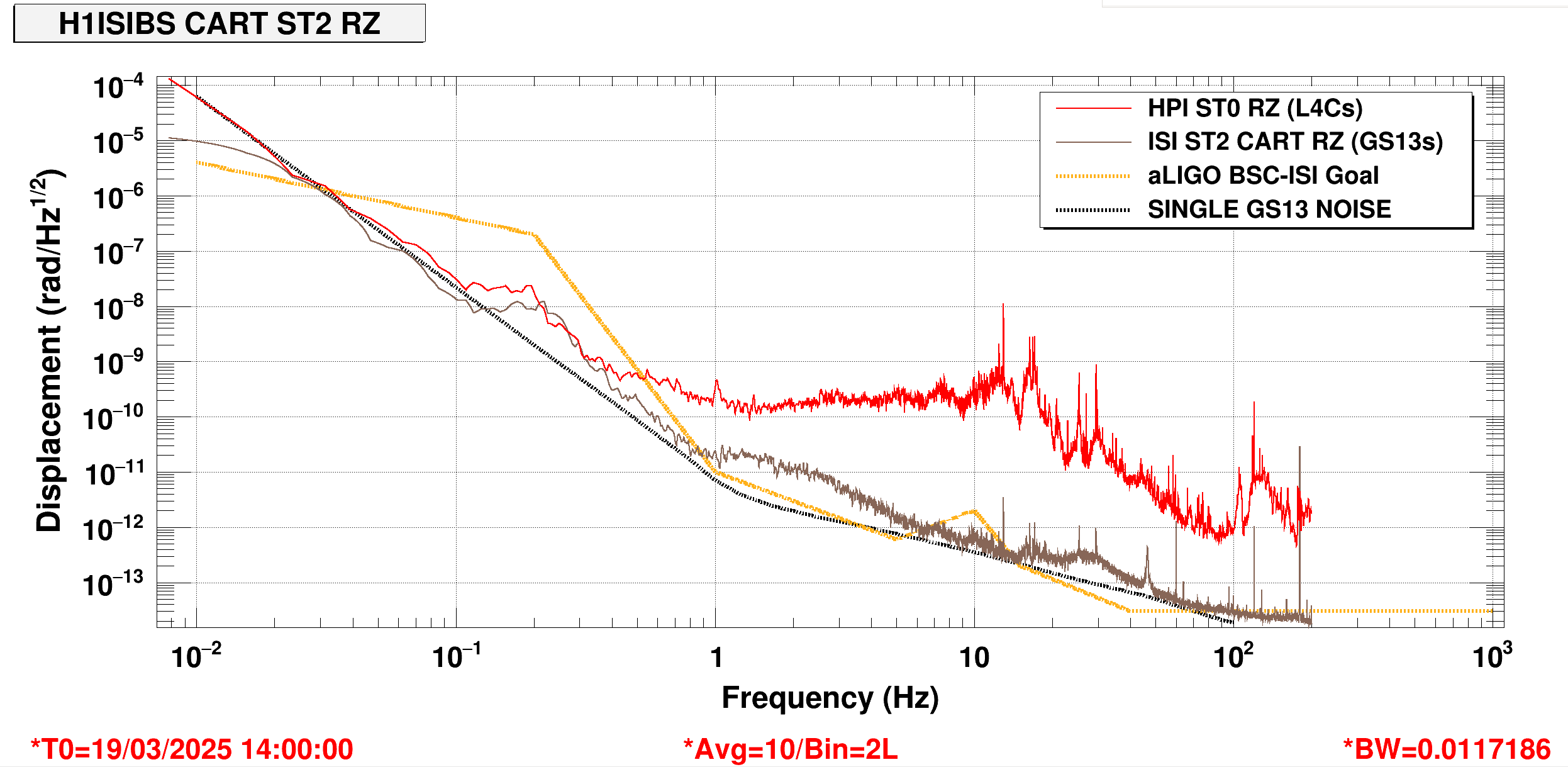
J. Kissel Oli and I are beginning the process for designing damping loops for the A+ O5 BBSS. We're running through the same process that I've been running through for over a decade designing suspension damping loops, in which I build up a noise budget for the optic displacement in all DOFs using input noises for seismic noise, DAC noise, and OSEM sensor noise filtered through said damping loops, all propagated thru the matlab dynamical model of the suspension. The first step along that journey is revisiting all the input noise sources, and making sure we have good model for those. OSEM noise and DAC noise models have recently been validated and updated when I revisited the HLTS damping loop design (see LHO:65687). However, I haven't worked on damping loops for suspensions suspended from a BSC-ISI since 2013, see G1300537 for the QUAD, G1300561 for the BSFM, and G1300621 for the TMTS. In those, I used the 2015 update to the 2005 requirement curve from T1500122 as the input motion. Now, after a decade worth of commissioning and improvements, I figure it's time to show that work here and use it in modeling future SUS damping loops where the SUS is mounted from a BSC-ISI. One of the biggest things we've learned over the decades is that the seismic noise input to the suspension at its "Suspension Point" motion for a given suspension can be the (quadrature) sum of many of the ISI's cartesian degrees of freedom, and depends on where and in what orientation it is on the optical table (see T1100617). As such, we installed front-end infrastructure to calculate the calibrate the lowest stage sensors -- the GS13 inertial sensors -- into both the Cartesian and Euler basis (see E1600028). In this aLOG, I do as I did for the HAM-ISI LHO:65639, I show the Cartesian contributions to each of the Beam Splitter's SUS point motion, by multiplying the Cartesian channels by the coefficients in the CART2EUL matrix for the beam splitter. The time I used for this performance of the H1 ISI BS was 0.01 Hz binwidth (128 sec FFT), 10 average, 50% overlap data set starting at 2025-03-19 14:00 UTC. - This was a late night local set, with no wind and 0.1 [um_BLRMS] level microseism (between 0.1-0.3 Hz) - GND to ST1 Sensor correction is ON, including the DIFF and COMM inputs. - Here at H1, the corner station does NOT have beam rotation sensors to improve the GND T240 sensor correction signal. But, both end stations have a BRS. - The wind was low at this measurement time, but it's worth saying that each end-stations wind fences are in dis-repair at the moment, too be fixed soon. - ST1 Z drive to ST1 RZ T240 decoupling is ON with a "pele_rz" filter - Off diagonal ST1 dispalign matrices are in play, X to RX & RY = -1e-4 & 1e-4, Y to RX = -7e-4, Z to RX & RY = 3.5e-3 & 2.5e-3 - ST1 Blend Filters: - X & Y = nol4cQuite_250 - Z = 45mHz_cps - RX & RY = Quite_250_cps - RZ = nol4cQuite_250. - As far as I can tell, there's NO ST1 to ST2 sensor correction on the ST2 CPS, nor is there and ST1 to ST2 FF to the ST2 actuators. - ST2 Blend Filters: - X & Y = 250mhz - Z = 250mhz - RX & RY = tilt_800b - RZ = 250mhz These will be used to make updates to /ligo/svncommon/SusSVN/sus/trunk/Common/MatlabTools/ seisBSC.m or seisBSC2.m which are toy models of the BSC-ISI performance, used so you don't have to carry around some giant .mat file of performance and you can per-interpolate on to an arbitrary frequency vector, much like I did for seisHAM.m in CSWG:11236. I've committed the .xmls and .pngs in the following SeiSVN directory: /ligo/svncommon/SeiSVN/seismic/BSC-ISI/H1/BS/Data/Spectra/Isolated/ASD_20250319/
Dear Oli,
It may be useful to remember that when Jeff says that the "input to the suspension at its "Suspension Point" motion for a given suspension can be the (quadrature) sum of many of the ISI's cartesian degrees of freedom" - what he means is that, if you want to make a Statistical model (which you do), and if the DOFs are independant (which maybe they are, and maybe they are not), then using the quadruture sum of the ASDs is a reasonable thing to do. In fact, the SUSpoint in reality, and the calculation of the SUSpoint, are done with a linear combination, NOT a quadrature sum. This means that if you grab some data from the cart basis sensors, take the ASDs (where you lose the phase), and add them in quadrature you will NOT get the ASD of the measured suspoint. I think this difference is not going to impact any of your calculations, but maybe it will help you avoid aggravation if you try to do some double checking.
-Brian
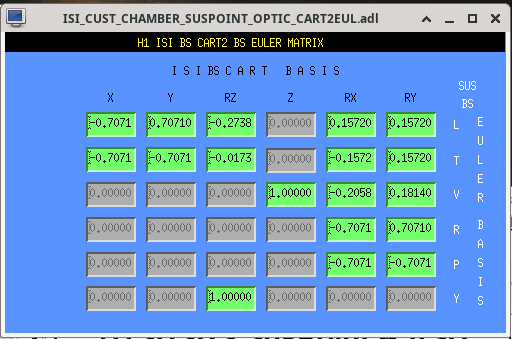
The Cartesian performance ASDs of the ISI BS to be used in the statistical model (in the way that Brian cautions in LHO:83473 above) have been exported to /ligo/svncommon/SeiSVN/seismic/BSC-ISI/H1/BS/Data/Spectra/Isolated/ASD_20250319/ 2025-03-19_1400UTC_H1SUSBS_CART_XYZRXRYRZ_ASD.txt (in the DOF order mentioned in the filename.) In the same directory, I also export the ASD of live, projected, coherent linear sum computed by the front-end 2025-03-19_1400UTC_H1SUSBS_EUL_LTVRPY_ASD.txt (in the DOF order mentioned in the filename.) If someone wants to race me, they can use this data and the CART2EUL matrix from the screenshot in LHO:83470, or if you want it programmatically, use /opt/rtcds/userapps/release/isc/common/projections/ ISI2SUS_projection_file.mat and running the following in the matlab command line, >> load /opt/rtcds/userapps/release/isc/common/projections/ISI2SUS_projection_file.mat >> ISI2SUSprojections.h1.bs.CART2EUL ans = -0.7071 0.7071 -0.2738 0 0.1572 0.1572 -0.7071 -0.7071 -0.0173 0 -0.1572 0.1572 0 0 0 1 -0.2058 0.1814 0 0 0 0 -0.7071 0.7071 0 0 0 0 -0.7071 -0.7071 0 0 1 0 0 0 ... but if I win the race, this plot will be a good by-product of the updates to seisBSC.m, which I'll likely post to the CSWG aLOG, like I did for seisHAM.m in CSWG:11236.
Jim reminds me of the following: - This BSC-ISI, ISIB2 has been performing poorly since ~2020. For some yet-to-be-identified reason, after years of physical, electronic, and data analysis investigations by Jim -- see IIET:15234 -- his best guess is some sort of mechanical "rubbing," i.e. mechanical interference / shorting of the seismic isolation, typically by cables. - He points is finger at the H2 corner (use T1000388 to reminder yourself of where that is on BSC2). - You can use the "Network" summary pages (https://ldas-jobs.ligo.caltech.edu/~detchar/summary/) and navigate to "Today" > "SEI" tab > "Summary [X]" or "Summary [Y]" or "Summary [Z]" pages, and look at the bottom row of plots to see how the ISIBS compares against other ISIs at LHO (left plot) and LLO (right plot). Here's a direct link to the plots including 2025-03-19 at 14:00 UTC, with the with the "SEI Quiet" time restriction mode ON. - Also, remember that the MICH lock-acquisition drive from the M2 OSEMs on the SUSBS causes back-reaction on the cage, which messes with the ISI controls, the ISIBS's isolation state guardian is regularly in the FULLY_ISOLATED_SO_ST2_BOOST state, which leaves the FM8 "Boost_3" off until after the ISC_LOCK guardian requests SEI_BS to FULLY_ISOLATED. Because I took data during nominal low noise, the ISI was fully isolated. However, the summary pages above -- even in SEI Quiet mode -- don't filter for whether the ISI is in FULLY_ISOLATED, so you'll that the ISIBS is consistently performing worse. *This* is not a fair comparison or show of how the ISIBS performs worse that the other BSC-ISIs, so take the plots with a big grain of salt. Also, another point of configuration notes: - This ISI, like all ISIs at LHO have their CPS synchronized to the timing system.