Follow up to LHO alog 83200 and LHO alog 80863.
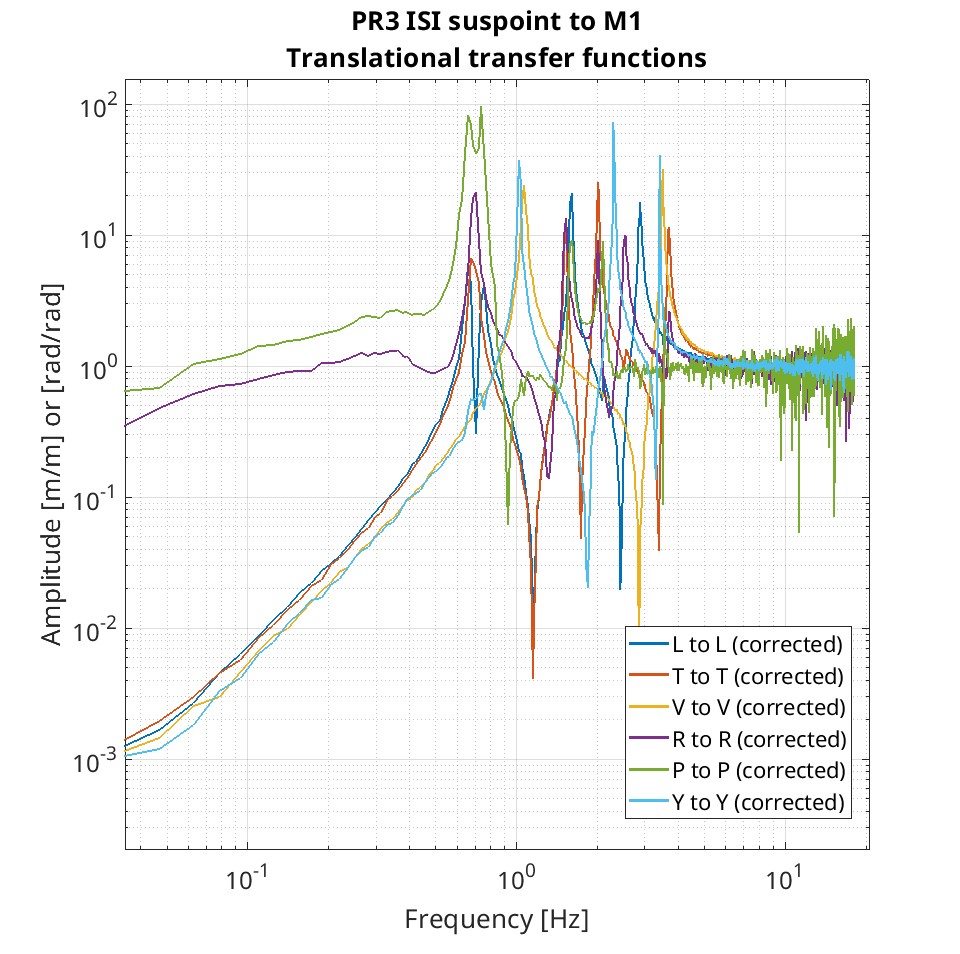
Brian and I thought of a better way of getting the M1 OSEMs in PR3 calibrated relative to the HAM2 GS13s: Use the ISI drives in L, T, V for frequencies above the suspension resonances to get an absolute calibration.
We can use the measurements Jeff took in LHO alog 80863 and project them in the OSEM basis, then use the translational (Longitudinal, Transverse, Vertical) drives to calibrate the OSEMs. Since the GS13s are calibrated to [m] all of the transfer functions (shown in the first attachment) are in [OSEM meters]/[GS13 meters]. At high frequencies (sufficiently above the resonances) the OSEMs should just be measuring (-1)*ISI motion, because the suspension is isolated. The calibration error will depend on how well we are able to drive L,T,V from the ISI without cross-coupling to any other DOF.
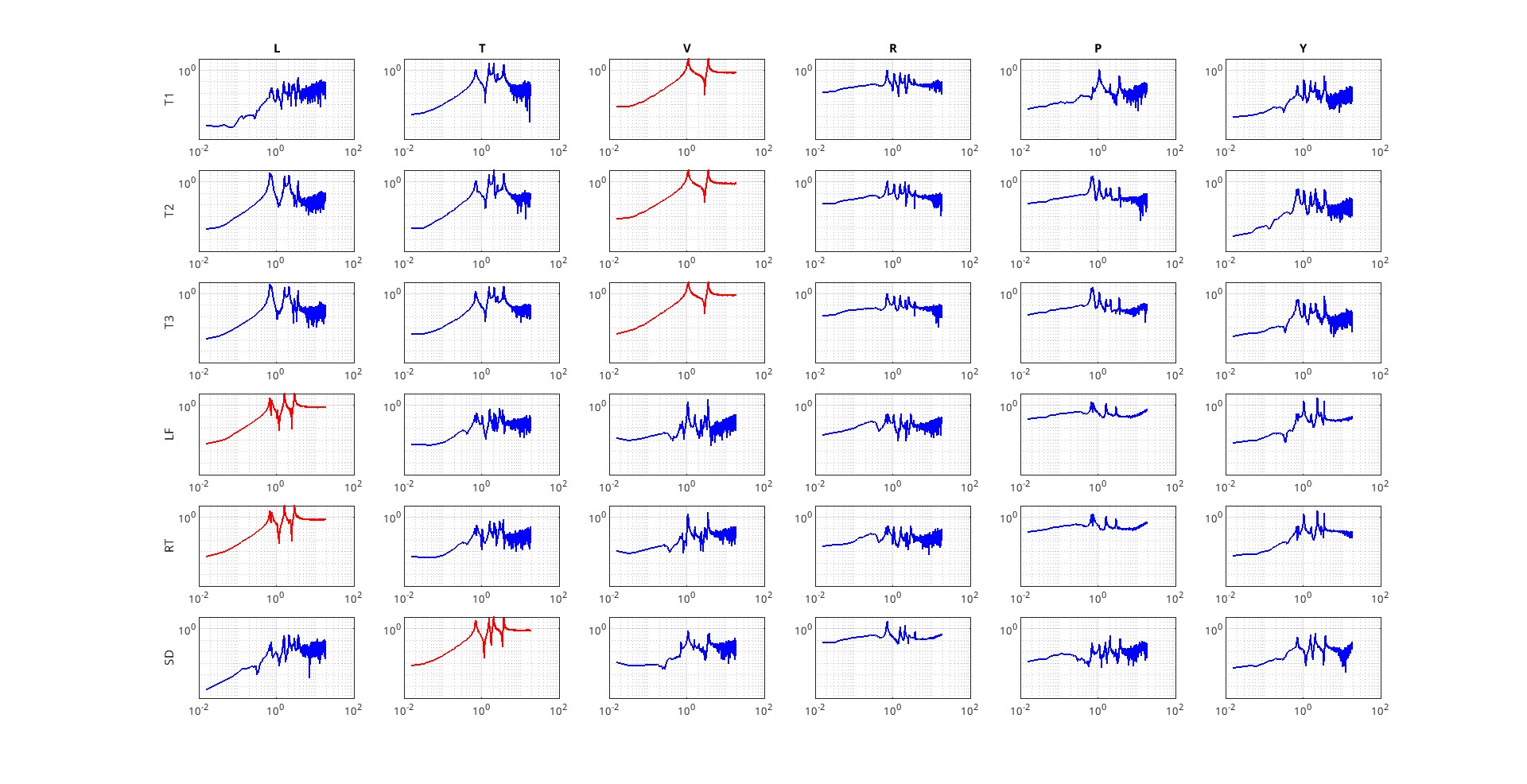
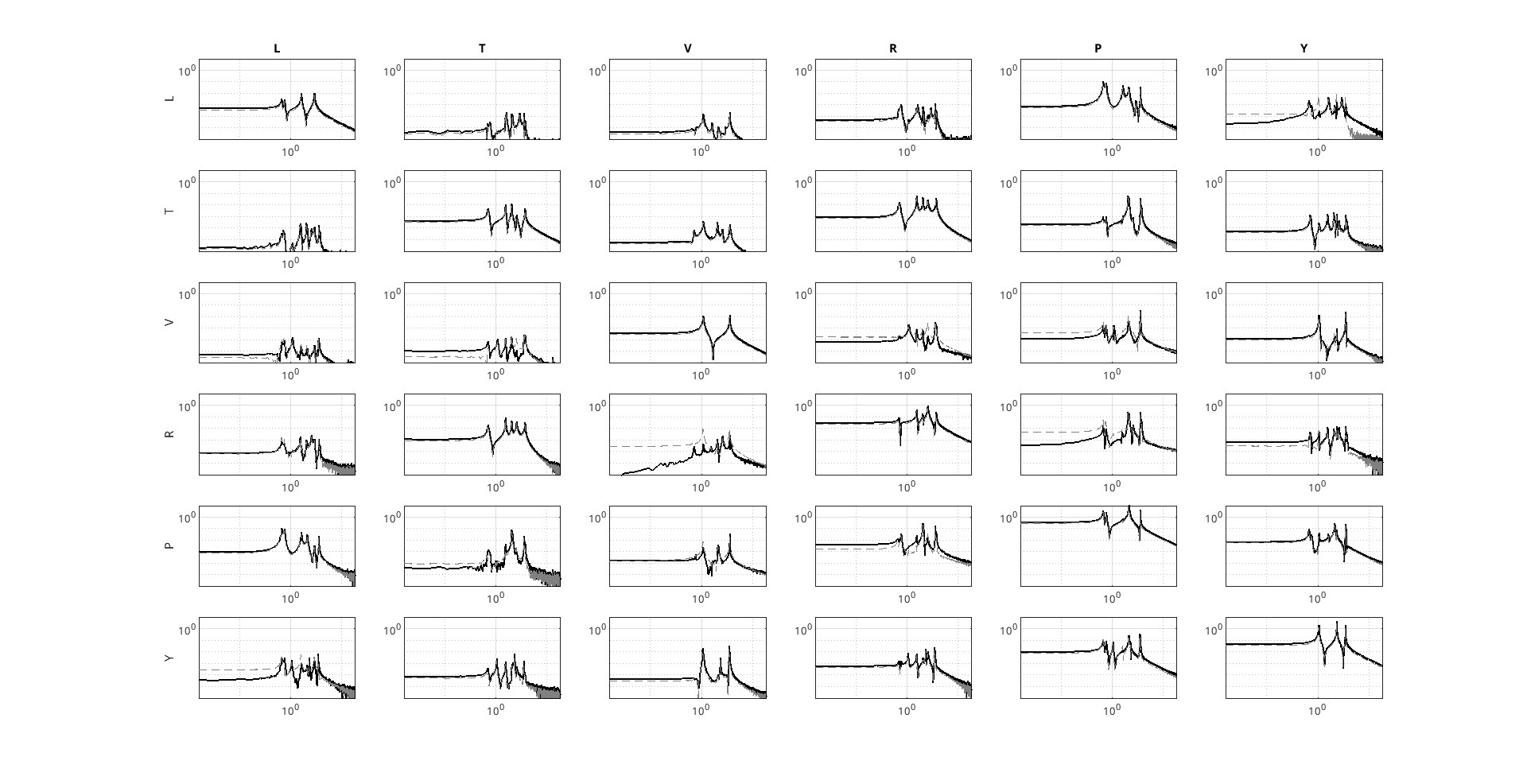
Figure 1 attached shows the 6x6 transfer matrix between the ISI drives and OSEMs (inputs are columns, and outputs are rows). We highlight the 6 translational transfer functions that can be used to calibrate the OSEMs in red. The drives seem decoupled enough to do the calibration (for example, we expect to see a length drive only in LF and RT, no motion anywhere else).
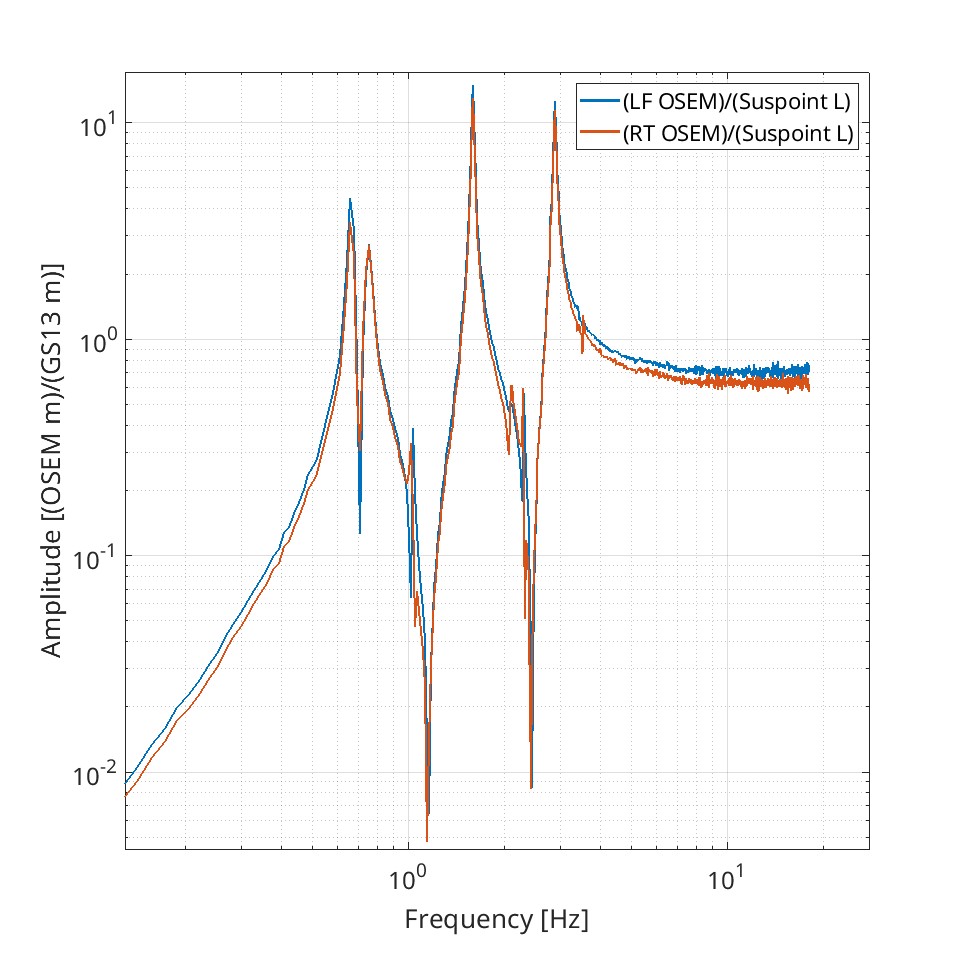
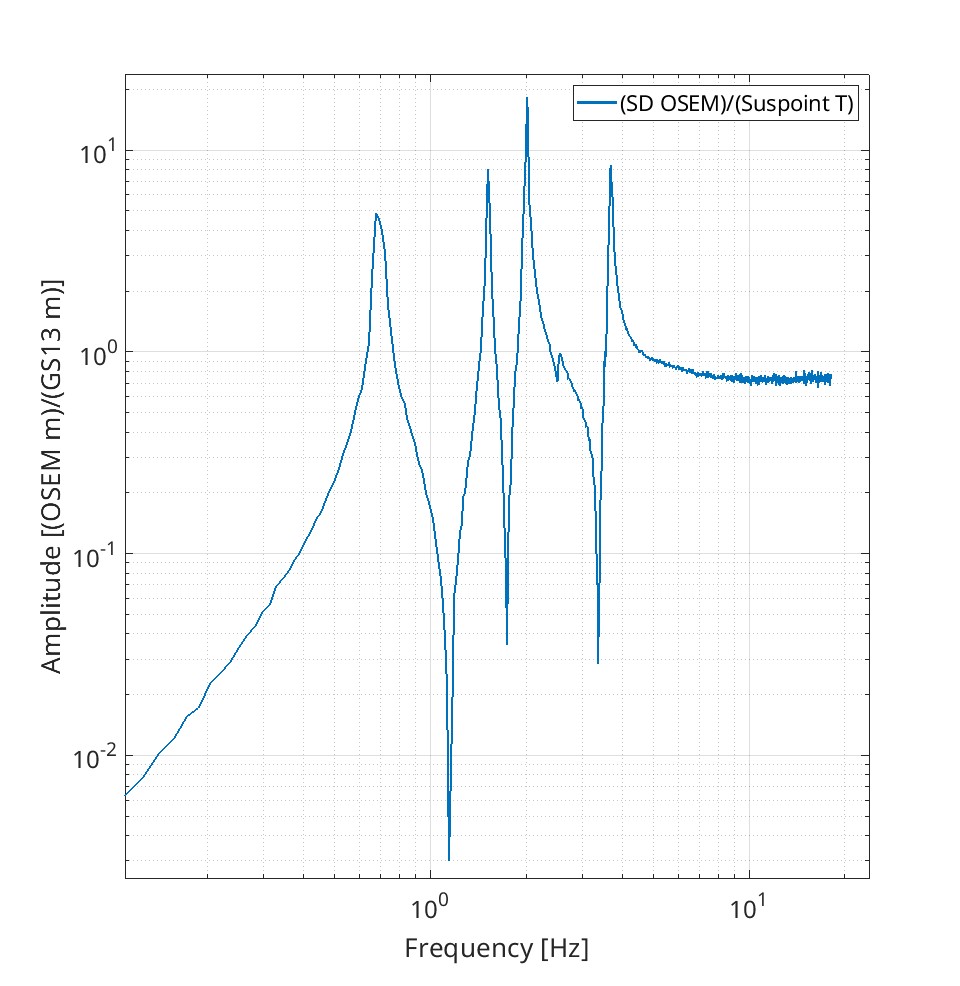
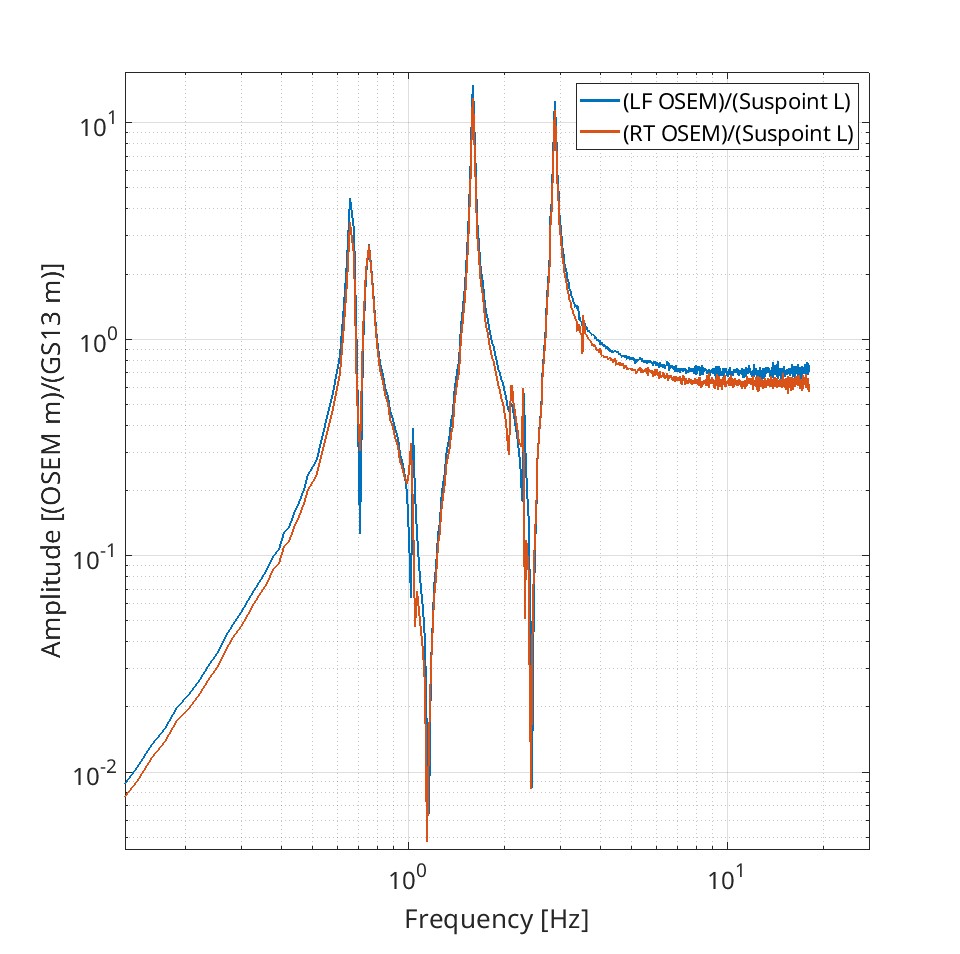
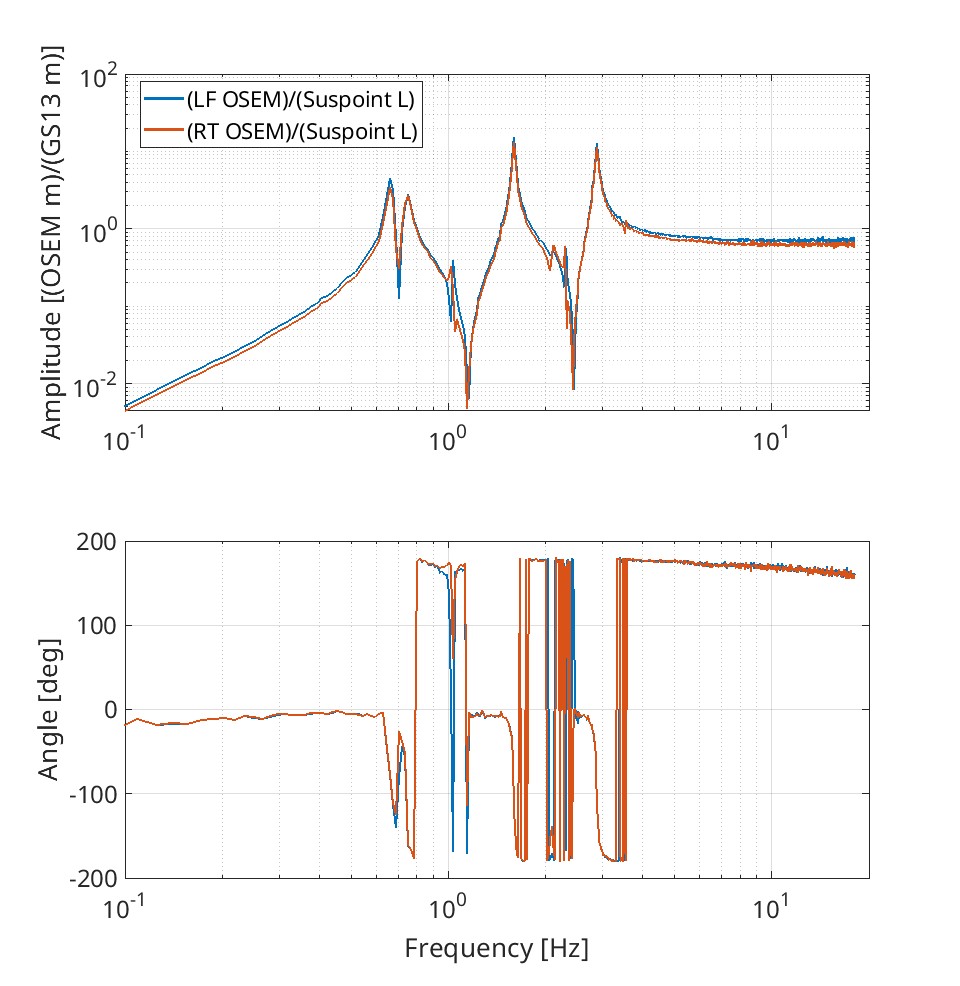
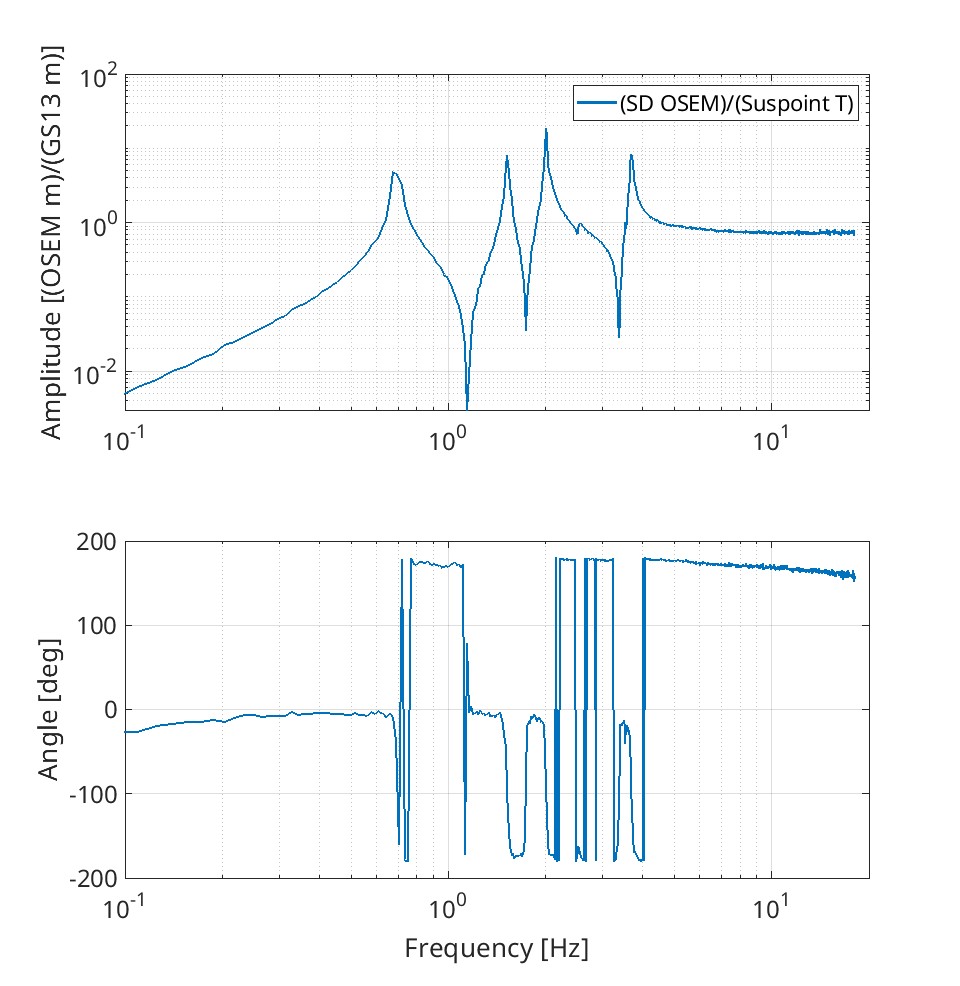
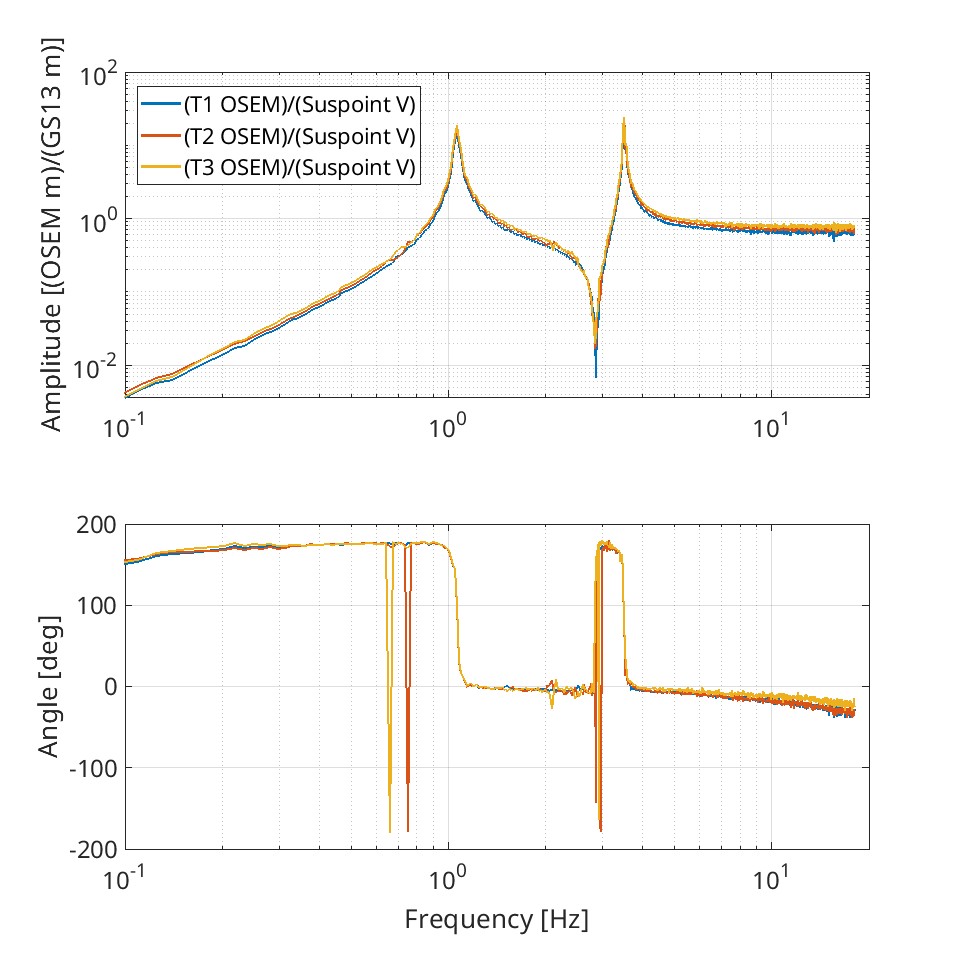
Figures 2,3, and 4 show a detail of the 6 transfer functions we will use for calibration, all of them should be scaled to 1 [OSEM m]/[GS13 m]. The scalings are:
0 1.394 0 0 0 0 T2
0 0 1.273 0 0 0 T3
0 0 0 1.411 0 0 LF
0 0 0 0 1.588 0 RT
0 0 0 0 0 1.366 SD
Adding here the phases for the TFs used for the calibration. There's a 20 to 25 degree phase loss after the last resonance up to 20 Hz. I'm not sure what more to make out of it, I thought the phase loss would be an artifact of the OSEM readouts, but maybe someone with more knowledge can chime in.
One way to fix the cross-coupling without having to get the absolute calibration is to slightly modify the M1 PR3 osem gains. They currently sit at:
T1 T2 T3 LF RT SD
1.161 0.998 1.047 1.171 1.163 1.062
Their new values would be at
T1 T2 T3 LF RT SD
1.164 0.903 0.866 1.073 1.199 0.942
This change will still leave a scaling factor of 1.54 m/(OSEM m), but at least it should fix the L-Y and the V-P-R cross couplings.