S. Dwyer, J. Driggers, G. Mansell, R. Short, others
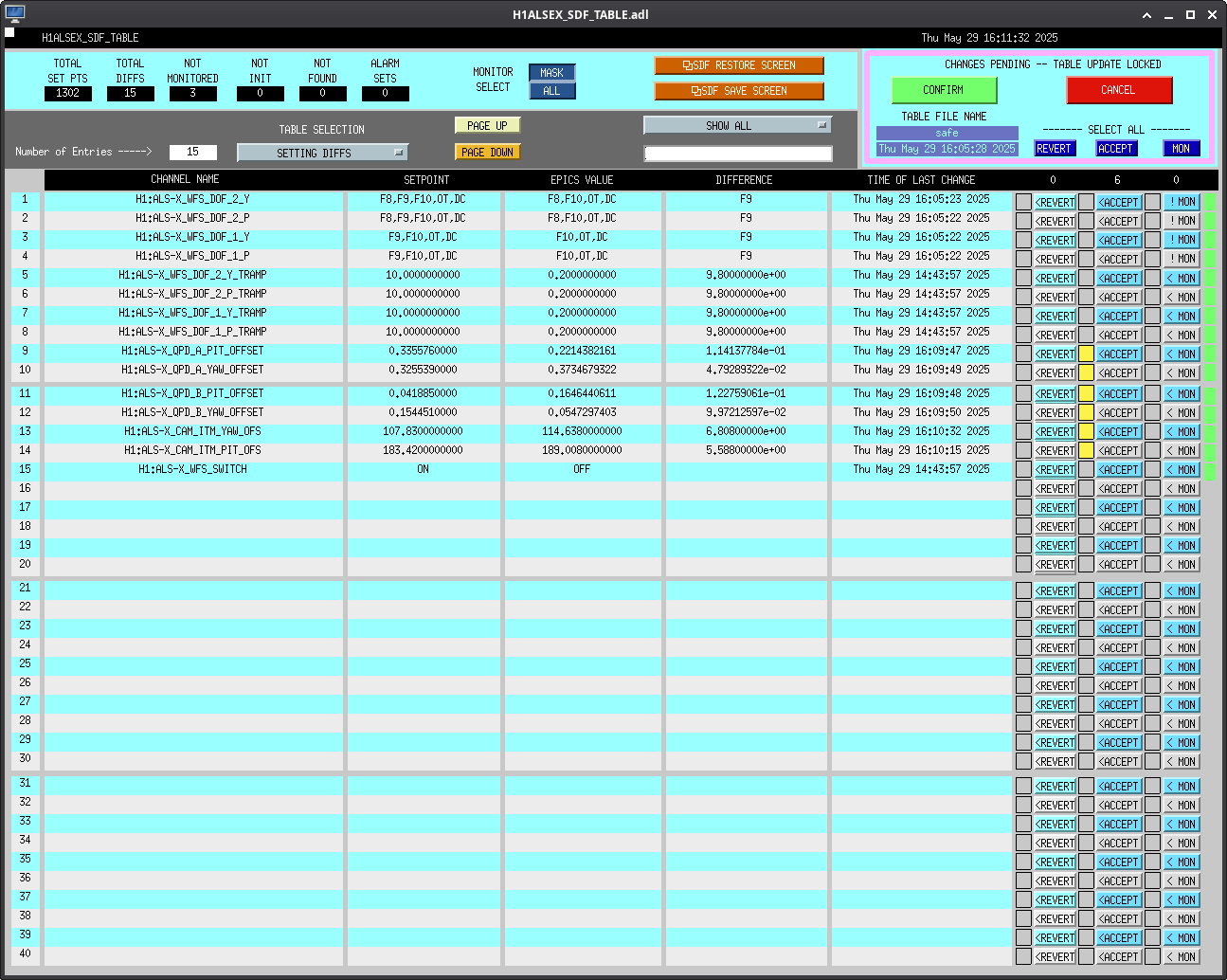
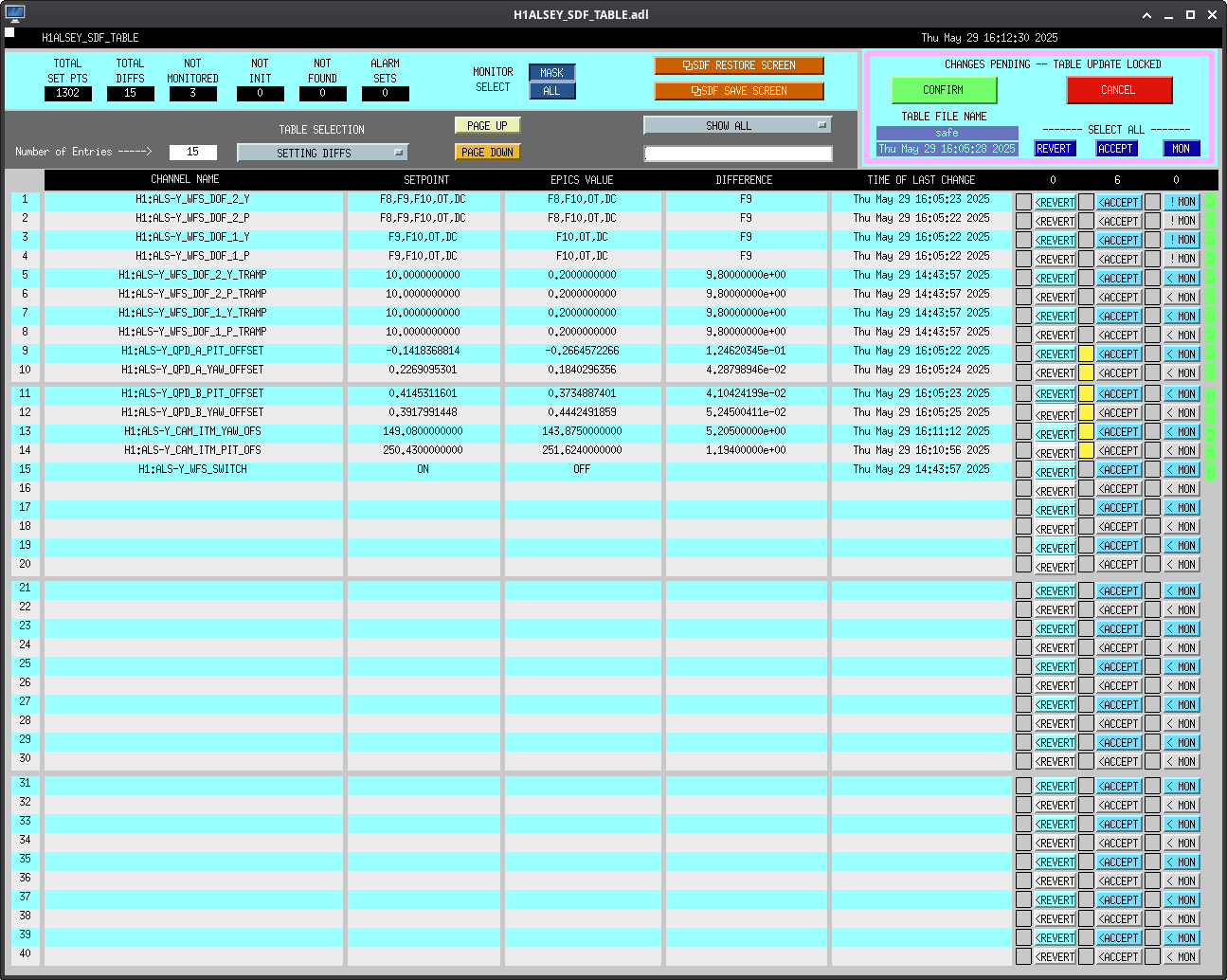
The efforts to close more of the ASC loops in ENGAGE_ASC_FOR_FULL_IFO continued this evening. Sheila was able to find some new values for ASC input matrices by stepping different DOFs, and they have been added to ISC_LOCK. With these, we were able to close every ASC loop in the main method of ENGAGE_ASC except for CHARD_Y and ADS (so, INP1_P/Y, PRC2_P/Y, SRC1_P/Y, SRC2_P/Y, and CHARD_P). Jenne relocked ALS-X as it had unlocked with Sheila's CHARD steps, and we started the ALS QPD scripts to keep green arms locked from there. Since CHARD_Y was continuing to confuse us, we decided to move on for the time being and converge ADS error signals with the hope that bringing more alignment together that CHARD_Y would be easier. Jenne tried to move PRM around to bring ADS3 closer to zero, but this caused a lockloss when moving too far. I paused in CHECK_SDF to set the ITM camera references to match the new ALS QPD offsets and accepted them in SDF (see attachment #1 for ALS-X and #2 for ALS-Y).
Before the next lock attempt, I ran an initial alignment with the new green references, doing our usual thing of only doing PRC alignment up to the PRX steps and aligning PRM by hand. Georgia also edited the ENGAGE_ASC state in the following ways with the hope of running the state now that we had several loops closed:
- [lines 3221 - 3239] in PREP_ASC_FOR_FULL_IFO CHARD P and Y intrix values (copied over from time machine)
- [lines 3489 - 3490] in ENGAGE_ASC_FOR_FULL_IFO CHARD Y input on and gain ramp
- [lines 3510 - 3511] in ENGAGE_ASC_FOR_FULL_IFO ADS DOF3 (PRM) gain turn on
Once relocked, we attempted ENGAGE_ASC_FOR_FULL_IFO, and the loops closed successfully! ISC_LOCK was then waiting for ADS to converge (which it wouldn't as ADS wasn't engaged), so Jenne tricked ISC_LOCK by having it think the DAS error signals were zero. This allowed Guardian to move into the run method of ENGAGE_ASC, which has a gain increase of PRC2 gain. This gain increase caused PRC2 to ring up and cause a lockloss.
On another attempt, we made it to PREP_ASC and tried running the loops closing steps in the Guardian shell, but we missed that PRC2_P was on its soft limiter, so it was too far off and caused a lockloss.
At this point, I've been struggling to relock up to PREP_ASC with several random locklosses along the way, even though I've been touching up DRMI alignment on almost every acquisition. Wind speeds have been increasing and just surpassed 30mph, so that may be having some impact.
I made one more attempt to close these loops, following the guardian steps one at a time. Closing the CHARD P loop brought the PRG down and misaligned the IFO, so I've commented out those lines in the guardian (3478-3479).
Perhaps in our next attempt we can try not closing either CHARD loop, but walking PRM and maybe the soft loops to center on the optics, and retry checking the CHARD matrix there.
At 6:14 UTC, INP, PRC, SRC1, SRC2, and ADS 3 pitch and yaw loops were closed, and CHARD Y was closed with a input matrix of 1*A45 - 1* B45. The build ups looked good, and the green offset servos had been running with the arms locked in green. So we can come back to this time, find what the QPD offsets were and the camera settings, and use this time to reset initial alignment references. I looked at a CHARD input matrix after this, and lost lock while trying to bring the 45 P signals to zero. But there does look like a better CAHRD error signal for pitch in this alignment than there was in the alignment that we had earlier today.