Oli, Ivey, Edgard.
We used Oli's measurements from [LHO: 86204] to do an OSEM calibration for the PR3 M1 OSEMs. Here are the outputs of the calibration script.
_______________________________________
OSEM calibration of H1:SUS-PR3
Stage: M1
2025-08-05_1700 (UTC).
The suggested (calibrated) M1 OSEMINF gains are
(new T1) = 1.770 * (old T1) = 2.055
(new T2) = 1.547 * (old T2) = 1.544
(new T3) = 1.443 * (old T3) = 1.511
(new LF) = 1.590 * (old LF) = 1.862
(new RT) = 1.774 * (old RT) = 2.063
(new SD) = 1.543 * (old SD) = 1.639
To compensate for the OSEM gain changes, we estimate that the H1:SUS-PR3_M1_DAMP loops must be changed by factors of:
L gain = 0.596 * (old L gain)
T gain = 0.648 * (old T gain)
V gain = 0.617 * (old V gain)
R gain = 0.617 * (old R gain)
P gain = 0.670 * (old P gain)
Y gain = 0.596 * (old Y gain)
The calibration will change the apparent alignment of the suspension as seen by the at the M1 OSEMs
NOTE: The actual alignment of the suspension will NOT change as a result of the calibration process
The changes are computed as (osem2eul) * gain * inv(osem2eul).
Using the alignments from 2025-08-05_1700 (UTC) as a reference, the new apparent alingments are:
DOF Previous value New value Apparent change
---------------------------------------------------------------------------------
L -57.1 um -33.6 um +23.5 um
T -101.3 um -65.6 um +35.7 um
V 62.4 um 36.6 um -25.8 um
R 433.5 urad 225.7 urad -207.8 urad
P -631.8 urad -406.5 urad +225.2 urad
Y -166.7 urad -76.1 urad +90.5 urad
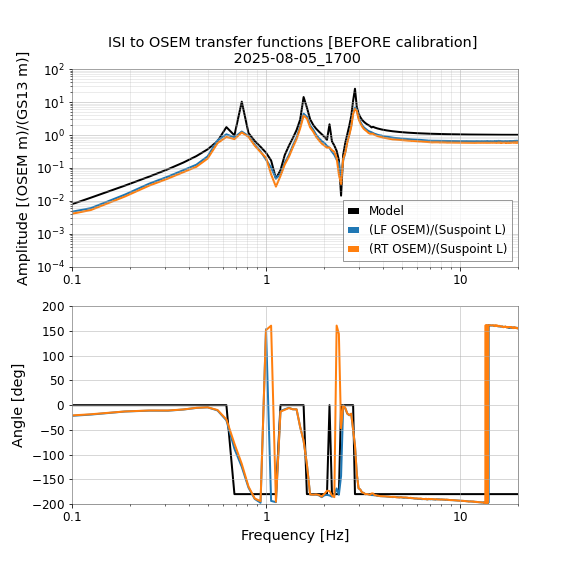
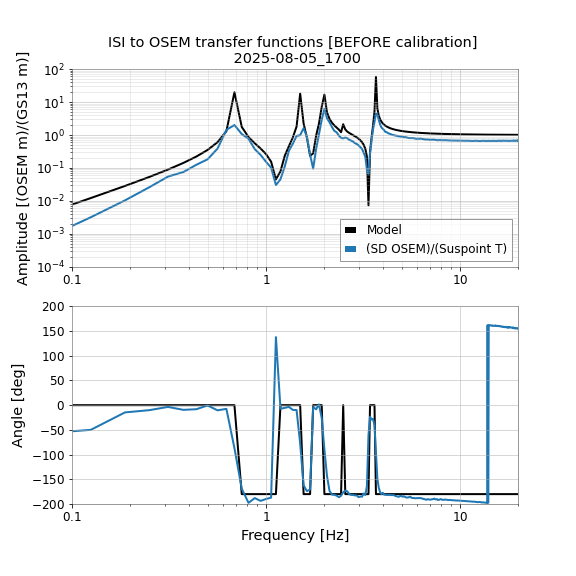
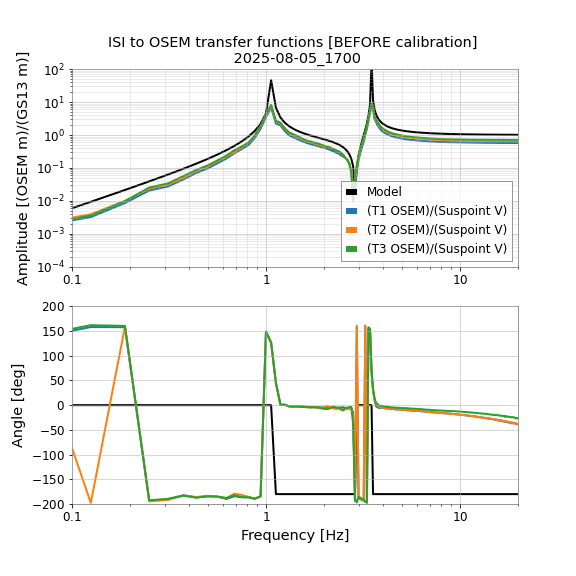
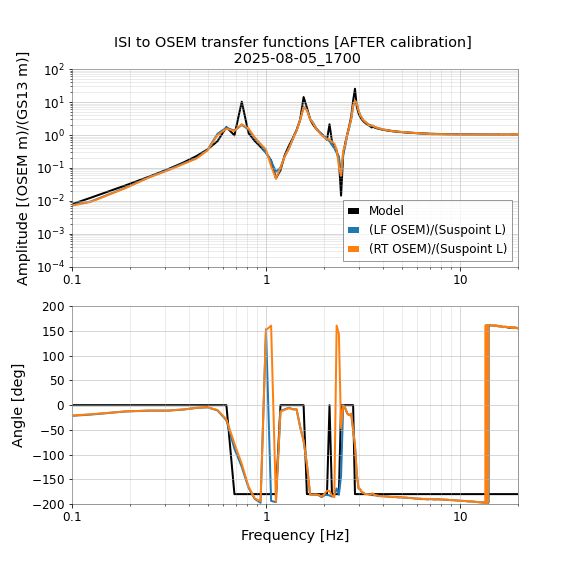
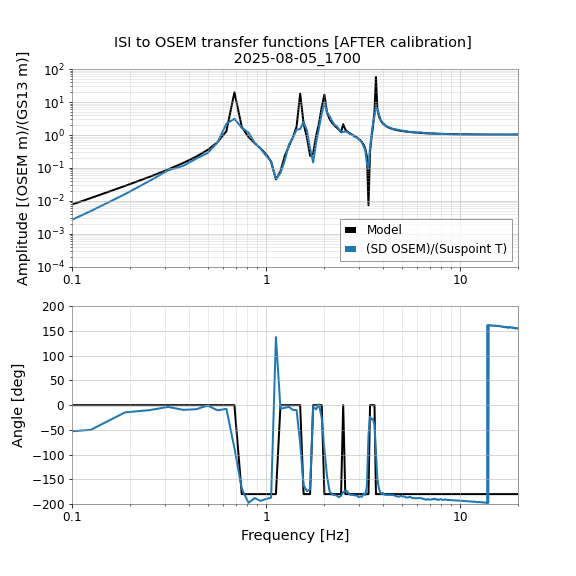
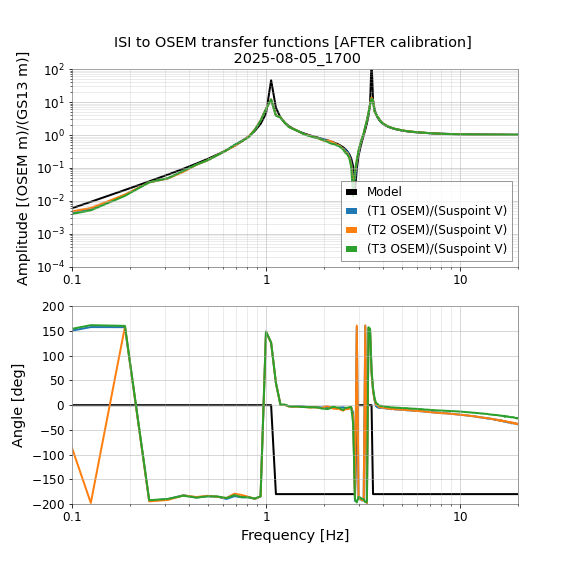
We have estimated a OSEM calibration of H1 PR3 M1 using HAM2 ST1 drives from 2025-05-21_0000 (UTC).
We fit the response M1_DAMP/HAM2_SUSPOINT between 5 and 15 Hz to get a calibration in [OSEM m]/[GS13 m]
This message was generated automatically by OSEM_calibration_SR3.py on 2025-08-06 01:07:57.985744+00:00 UTC
%%%%%%%%%%%%%%%%%%%%%%%%%%%%
EXTRA INFORMATION
The H1:SUS-PR3_M1_OSEMINF gains at the time of measurement were:
(old) T1: 1.161
(old) T2: 0.998
(old) T3: 1.047
(old) LF: 1.171
(old) RT: 1.163
(old) SD: 1.062
The matrix to convert from the old Euler dofs to the (calibrated) new Euler dofs is:
+0.596 -0.0 +0.0 -0.0 +0.0 -0.003
+0.0 +0.648 -0.0 +0.0 +0.0 -0.0
-0.0 +0.0 +0.617 -0.004 +0.001 +0.0
+0.0 +0.0 -0.748 +0.617 -0.007 -0.0
+0.0 +0.0 +0.517 -0.036 +0.67 -0.0
-0.407 +0.0 -0.0 +0.0 -0.0 +0.596
The matrix is used as (M) * (old EUL dof) = (new EUL dof)
The dof ordering is ('L', 'T', 'V', 'R', 'P', 'Y')
The calibration values posted here are correct, but the theoretical alignment values are incorrect. See the corrected post from Sep 26th, 2025.
[CORRECTED LOGPOST LHO: 87160]