jeffrey.kissel@LIGO.ORG - posted 10:17, Tuesday 23 September 2025 - last comment - 18:56, Friday 26 September 2025(87093)
H1 ISI HAM2 and ISI HAM5 EUL2CART Suspension Point Drive Matrices Changed from PR3/SR3 to PRM/SRM
J. Kissel
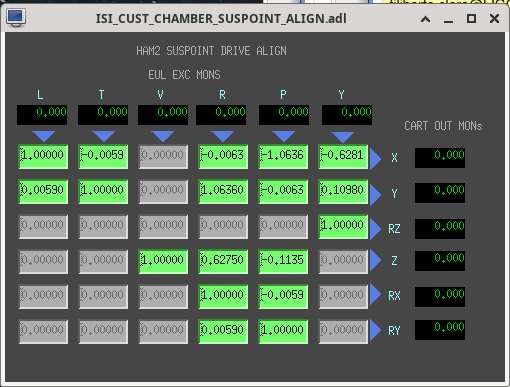
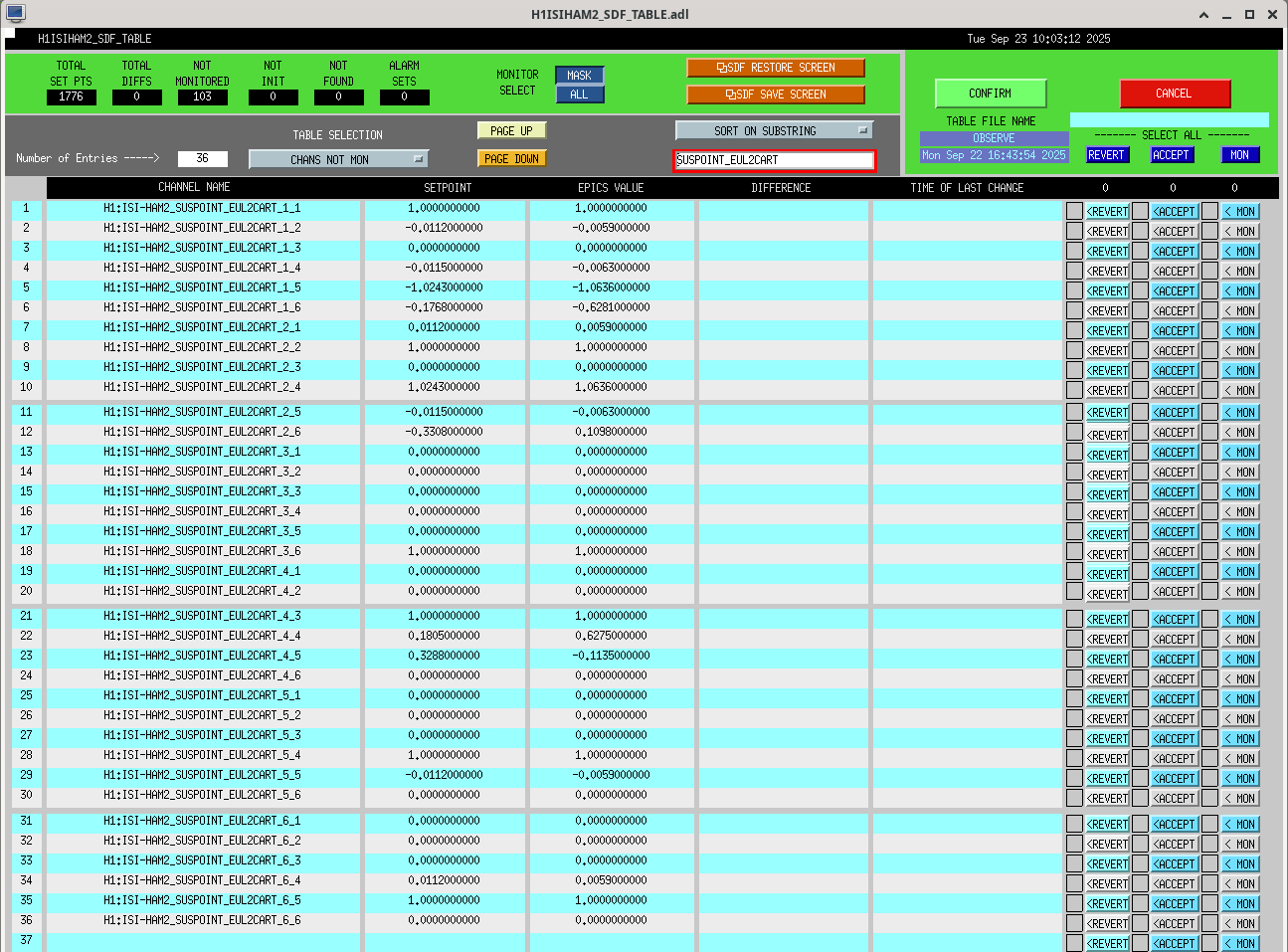
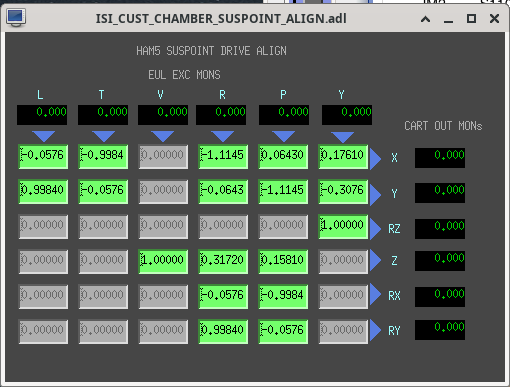
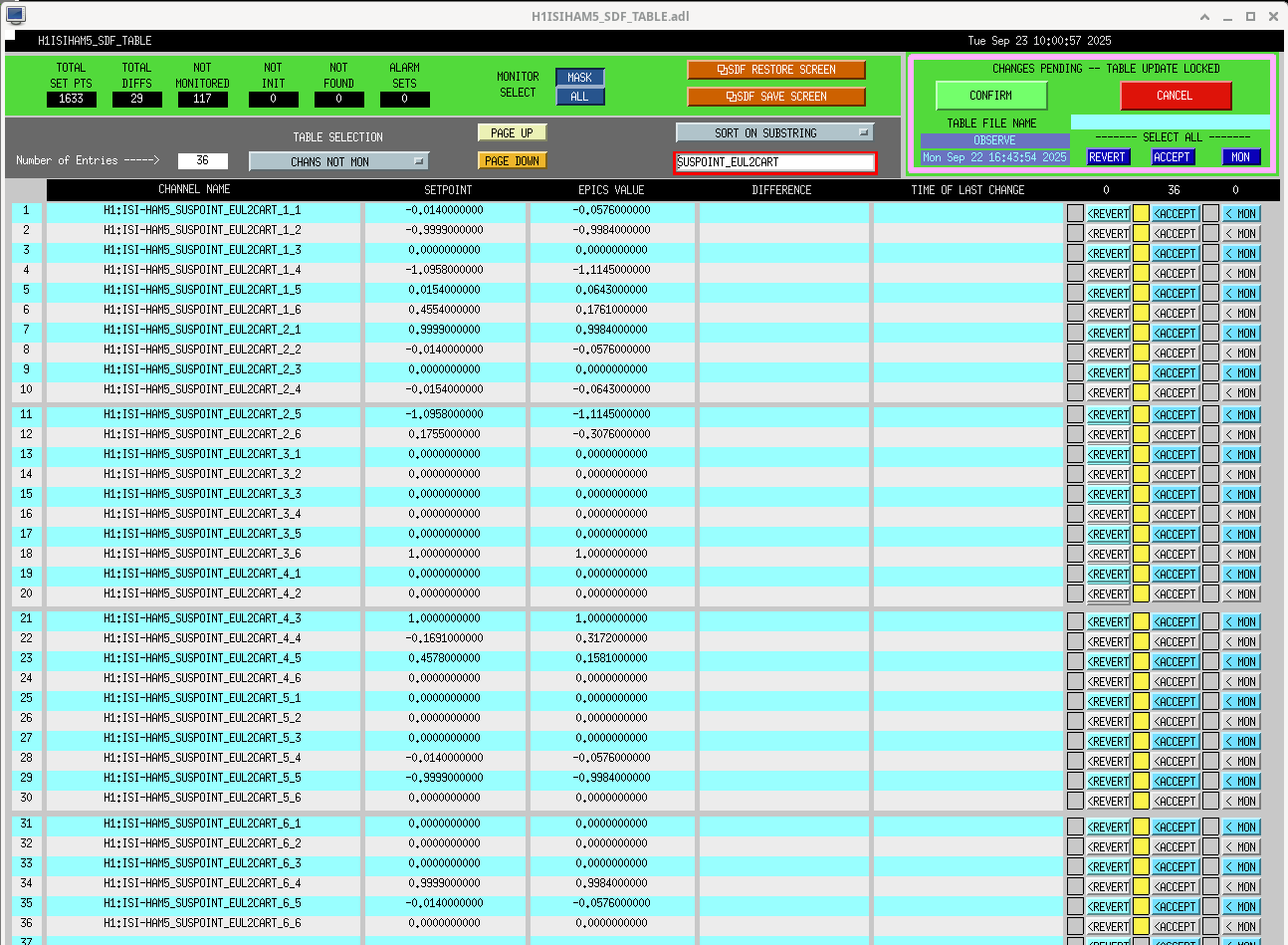
In prep for measuring the absolute calibration PRM and SRM OSEMs, I've changed the ISI HAM2 / HAM5 suspension point drive matrices to project from the PRM and SRM suspension points rather than PR3 and SR3 what we used when calibrating those top mass OSEMs.
Here's the method for installing these matrices:
>> addpath /ligo/svncommon/SeiSVN/seismic/Common/MatlabTools/
>> load /opt/rtcds/userapps/trunk/isc/common/projections/ISI2SUS_projection_file.mat;
>> ham2 = ISI2SUSprojections.h1.prm.EUL2CART;
>> fill_matrix_values('H1:ISI-HAM2_SUSPOINT_EUL2CART',ham2)
>> ham5 = ISI2SUSprojections.h1.srm.EUL2CART;
>> fill_matrix_values('H1:ISI-HAM5_SUSPOINT_EUL2CART',ham5)
Attached are screenshots of the matrix MEDM screens themselves and the SDF accept in the OBSERVE .snap files.
Since these are used and moved around to calibrate each of the SUS in the chamber, and it's so simple to restore if lost, I'm not bothering to save the values in the ISI's safe.snap.
Images attached to this report
Comments related to this report
WARNING: We need to check this before we use it again. These projections were done for the sensors, not the actuators.
The EUL basis -> ISI drives actuator matrix needs to be calculated and added to the suspoint projections script and data in the repo. Edgard says this should be the transpose of the sensor matrix, not the inverse. Documentation is in progress.
(EUL2CART and CART2EUL are both for the sensor projection, and are inverses of each other)
Ohp. I made a mistake here.
The drive matrix calculation bit is true about applied drives. However, because the ISI drive requests here are made at the error point of the ISO loops, the inverse is actually correct. Nevermind what I said before.
Apologies for the confusion.