Summary
The JAC length servo was designed to set the unity gain frequency (UGF) at 400 Hz. Additional low-frequency boost was implemented to improve suppression below 50 Hz. The open loop gain (OLG) was measured and compared with the servo model.
Details
-
PZT actuator compensation
The PZT driver has poles at 1 Hz and 400 Hz, and a zero at 10 Hz.
To compensate for this response, a zpk(400, 10, 40) filter was implemented in the servo.
With this compensation, the actuator response becomes approximately a first-order low-pass with a cutoff frequency of 1 Hz. -
Unity gain frequency
The servo gain was then set so that the unity gain frequency (UGF) is 400 Hz.
The phase margin at 400 Hz is 37 degrees, which includes the phase contribution from the first-order low-pass (90 degrees) and the additional phase delay in the system. -
Low-frequency boost
A 1–50 Hz boost filter (first-order pole-zero boost filter) was implemented to improve low-frequency suppression.
The phase contribution of this filter is –7 degrees at 400 Hz, resulting in a total phase margin of about 30 degrees at the UGF.
Also, the integrater was implemented below 1Hz. Combination between boost and integrator gives f^{-2} slope below 50Hz. -
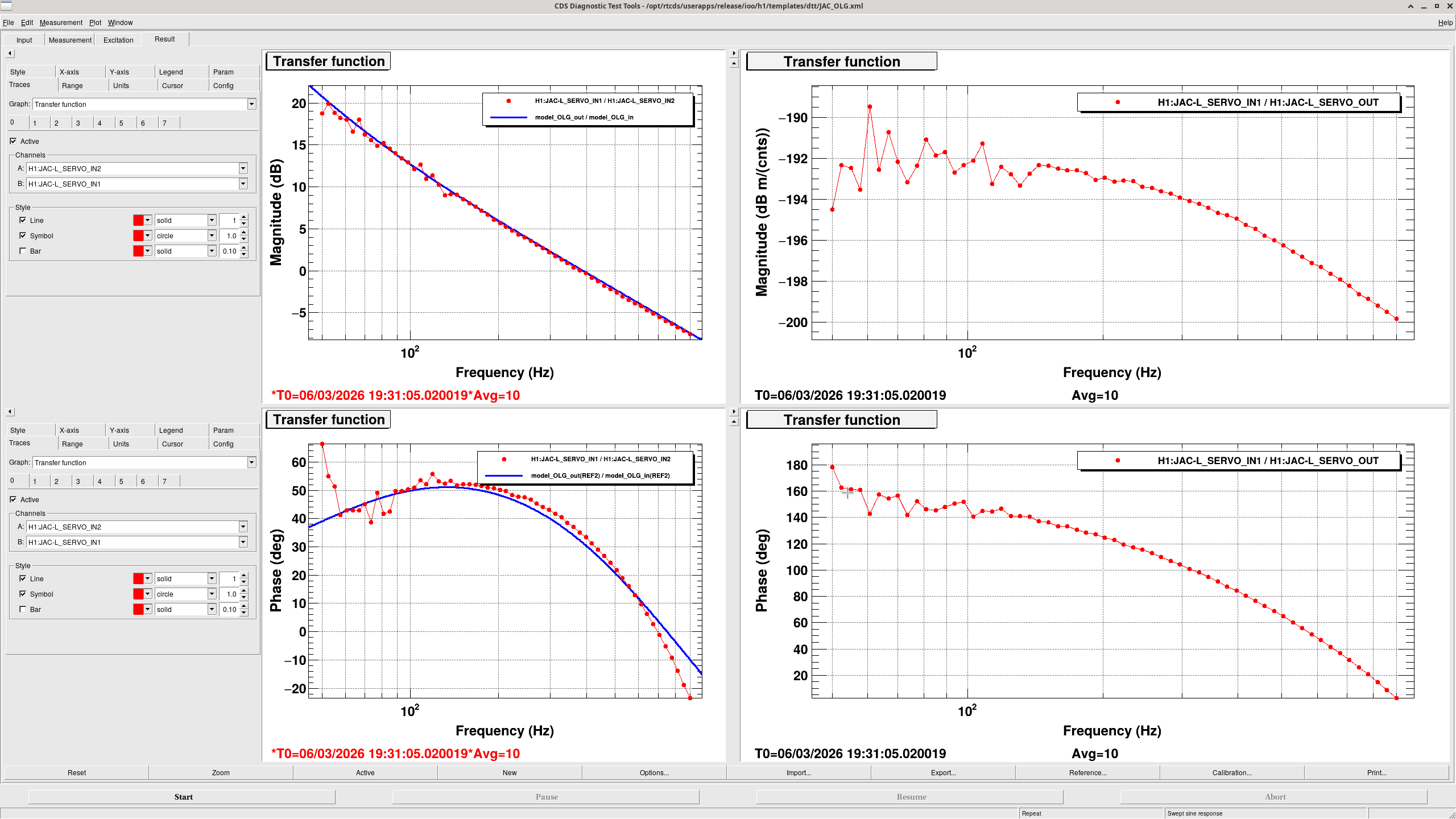
Open Loop Gain measurement
The open loop gain (OLG) has been measured. A comparison between the measured OLG and the model is shown in the attached plot in the left panel. The right panel is the TF of the PZT.
-
MEDM interface
The OLG measurement template can be opened from the spectrum/OLG button in the bottom-right corner of the MEDM screen.