sheila.dwyer@LIGO.ORG - posted 14:16, Friday 13 December 2013 (8944)
End X PZT response to TMS motion
Starting at around noon, the QPD servos at end Y are running, we will leave this alone for about a day, then turn off a cleanroom to see if we have a repeat of the alingment drifts seen in end Y.
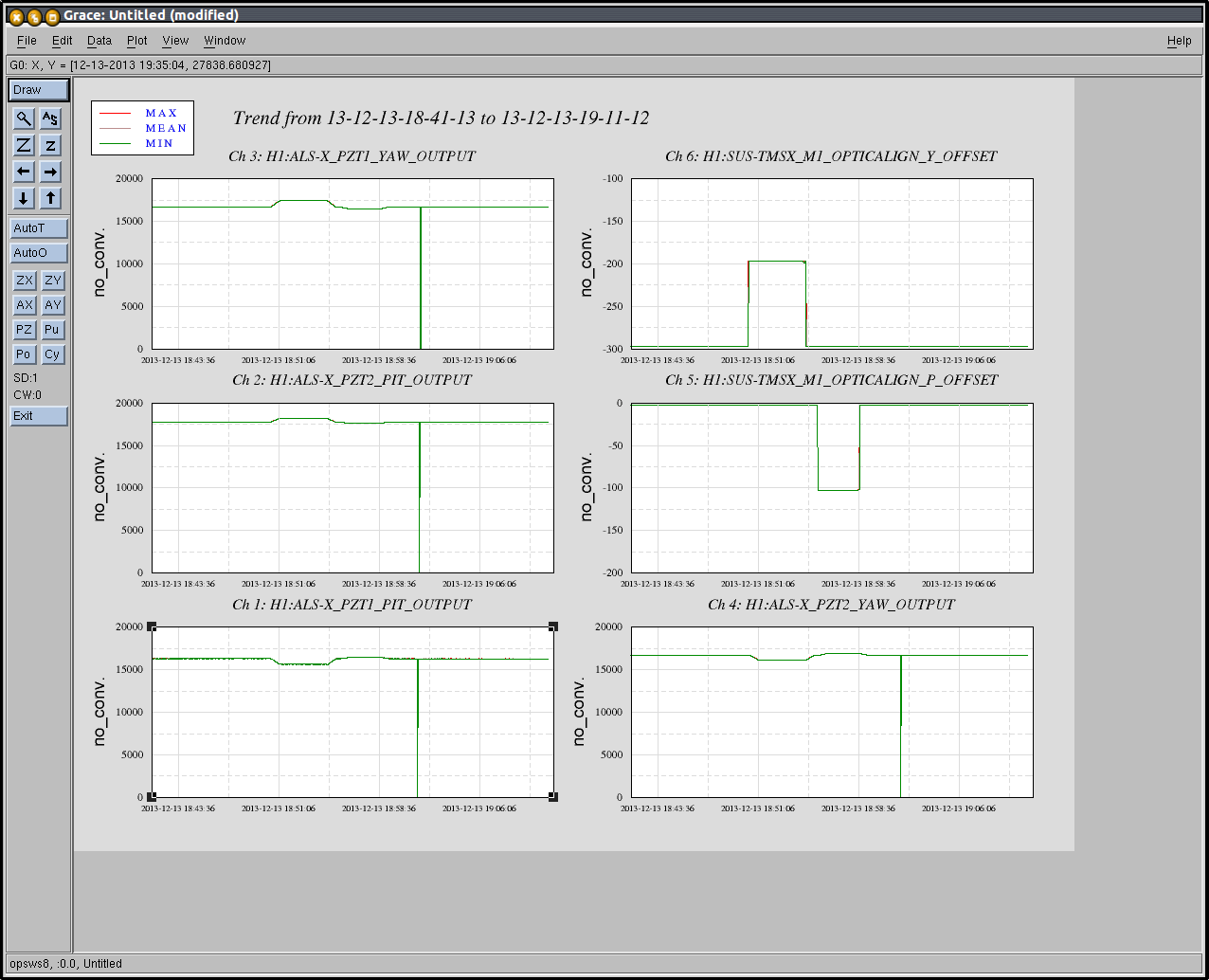
Before starting I moved the TMS with the QPD servos locked, here are the responses in the PZT sensors and outputs:
Moving the TMS in yaw moves the PZT pit, and vice versa
| sensor mV/ urad TMS yaw | output counts/urad TMS motion yaw | sensor mV/urad TMS pit | output counts /urad TMS pit | |
| PZT1 pit | -2 | -6.8 | 0.2 | 1.3 |
| PZT2 pit | 0.1 | 4.12 | 0.56 | 2.07 |
| PZT1 yaw | -22.9 | 7.26 | 0.594 | 1.39 |
| PZT2 yaw | -1.59 | 5.43 | -.79 | -2.1 |
for reference the times are:
nominal TMS positions PIT -3urad, Yaw -297urad UTC 18:45:35
PIT -3 urad YAW -197 urad UTC 18:50
PIT -103 urad YAW -297 UTC 18:54:51
Images attached to this report