[Betsy, Oli, Ibrahim, Elenna, with online help from Arnaud, Marie and Gabriele]
Today we began by attempting to follow the same steps that LLO did to decouple pitch and yaw, as described in 81817. To summarize, they applied a length offset and adjusted coil driver gains to ensure the same amount of motion is sensed on M0 F2 and F3 oseminfs.
Betsy and I immediately found that following that same process was not going to work. As a reminder, Ibrahim and Oli swapped the F3 osem yesterday due to ground loops, 90838. To get straight to the point, here are some results:
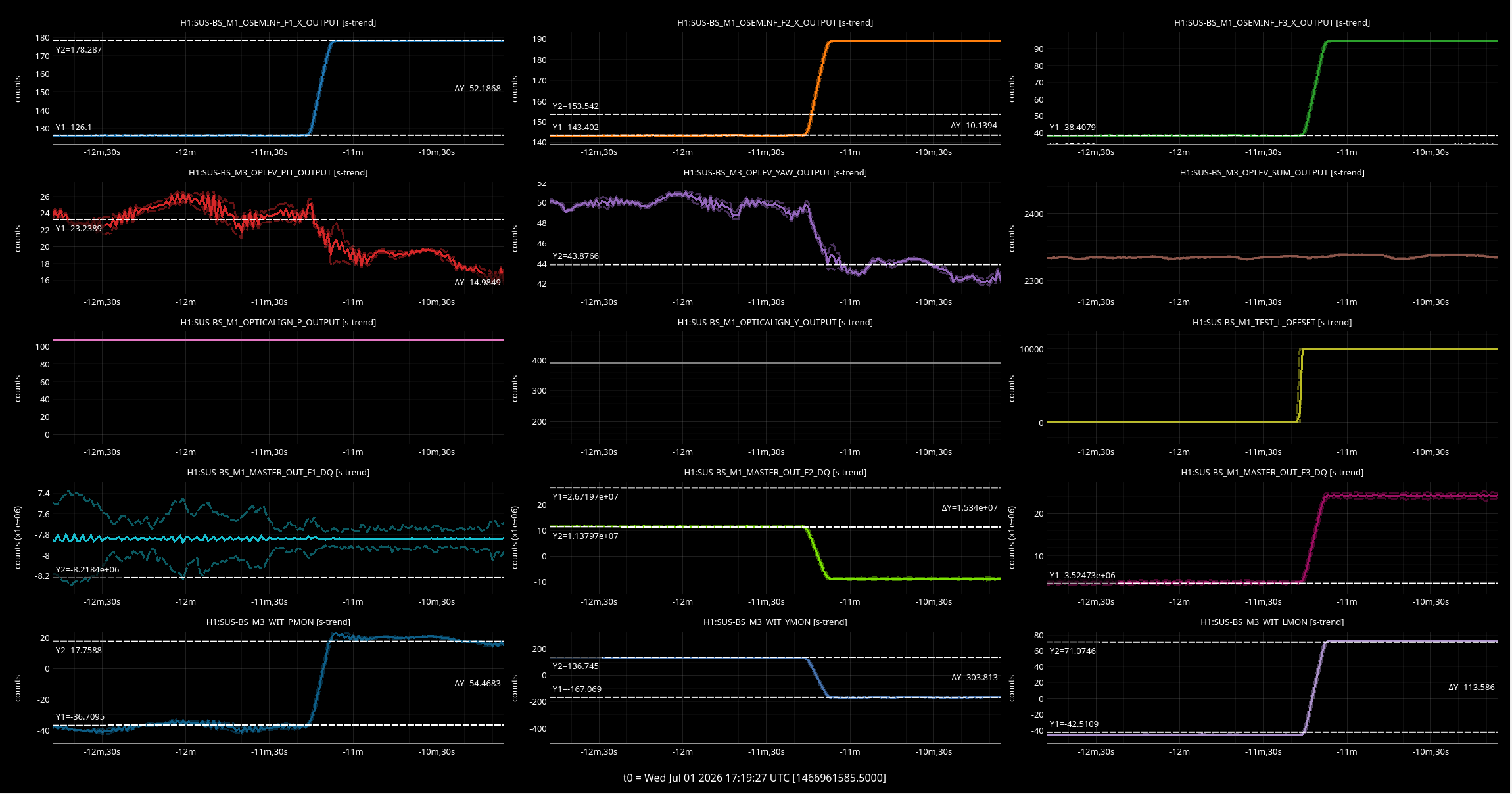
- When we apply a 10,000 ct M0 LENGTH offset to the BBSS, we see the F2 and F3 master outs drive the expected amount. F1, F2, and F3 all oseminf all sense motion, which makes sense. The oplevs show a small amount of pitch and yaw motion, and the bottom stage wits also a see some pitch and yaw motion, but smaller than the length motion.
- overall, these results make sense. We could probably do a better job balancing the M3 osems, so we are less concerned about those results, and trust the oplev.
- When we apply a 200 urad alignment offset in YAW to the BBSS, we see the F2 and F3 master outs drive the expected amount. We see that F2 and F3 oseminf sense differential motion with nearly the same magnitude, which makes sense with our sensing matrix. The oplev shows roughly 200 urad of motion, and the M3 yaw wit also shows roughly 200 urad of motion. There is a small amount of pitch motion, roughly 12% the size of the yaw motion in the oplev. We know the oplev steering mirror is a bit crooked, so we expect some pit/yaw cross coupling there.
- these results make a lot of sense, and it is satisfying to see agreement with the M3 wit and oplev.
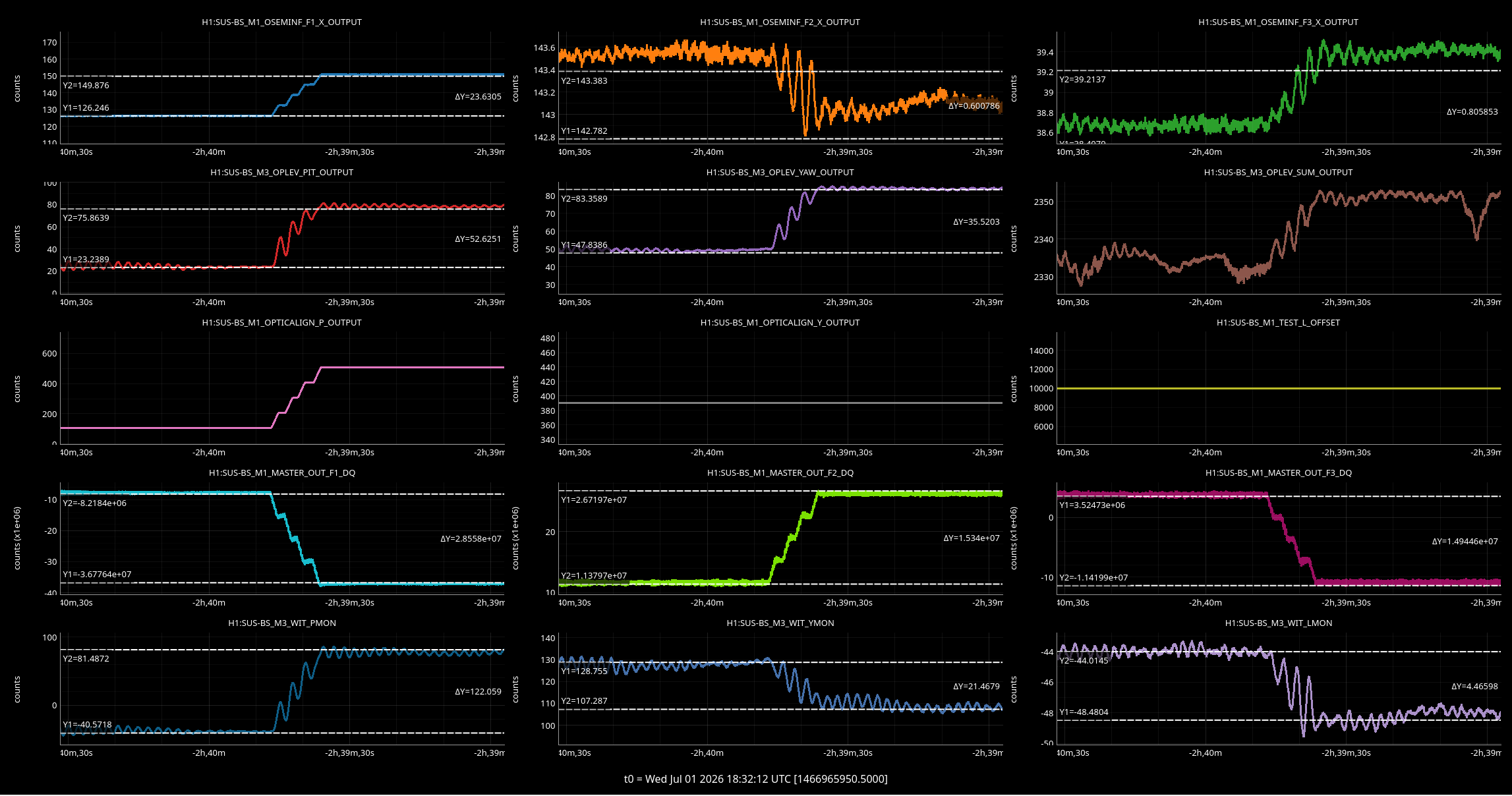
- When we apply a 400 urad alignment offset in PITCH, we again see the expected amount of drive signal in F1, 2 and 3 at the master outs. However, we see a large motion F1 (expected) and barely any motion in F2 and F3. Numbers: we see a +24.9 ct change in F1 versus a -0.51 ct in F2 and +0.72 ct in F3. The oplev shows a 56 urad motion in pitch and a 35 urad motion in yaw, so the yaw is 60% of the pitch motion. We see more pitch versus yaw motion in the M3 wit.
- The top mass oseminf motion does not make sense, because the F1 motion should be -2x the F2 and F3 motions. Instead we have more than an order of magnitude discrepancy and the F2 and F3 osems are sensing differential motion, instead of common motion.
- The oplev similarly sees a significant amount of yaw motion compared to the pitch motion
- We may not be able to trust the M3 wits because of the osem balancing.
Arnaud notes that overall this is an improvement, because last week the P2Y cross coupling was much worse, roughly 1x pitch to 2x yaw. The overall numbers are different depending on which sensor you trust. However, Betsy and I think that the top mass drive versus sensed motion (master outs versus oseminfs) should be relatively straightforward. It seems like we have a mechanical imbalance on the suspension. However, the improvement that has occured was only due to swapping an osem, which seems electrical.
Oli will revisit the derivation of the osem2eul/eul2osem matrices. We also plan to recheck the suspension transfer functions to see if the P2Y coupling is reduced.