stefan.ballmer@LIGO.ORG - posted 13:17, Monday 13 January 2014 (9237)
PRX locking stably
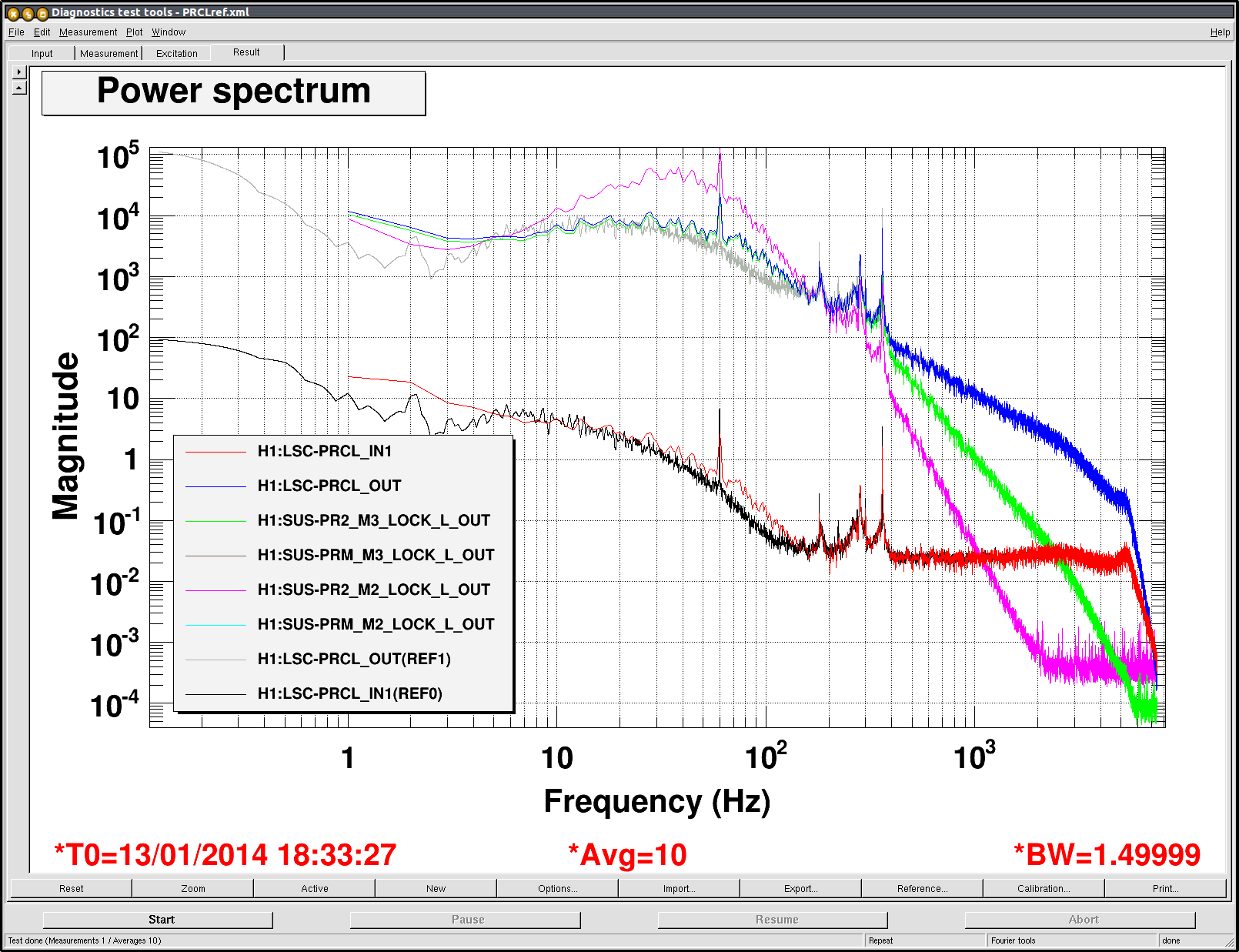
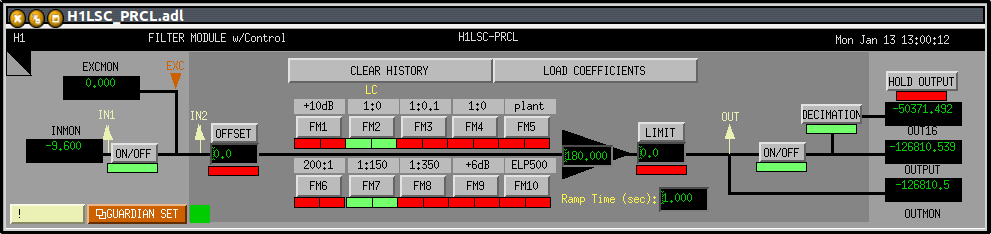
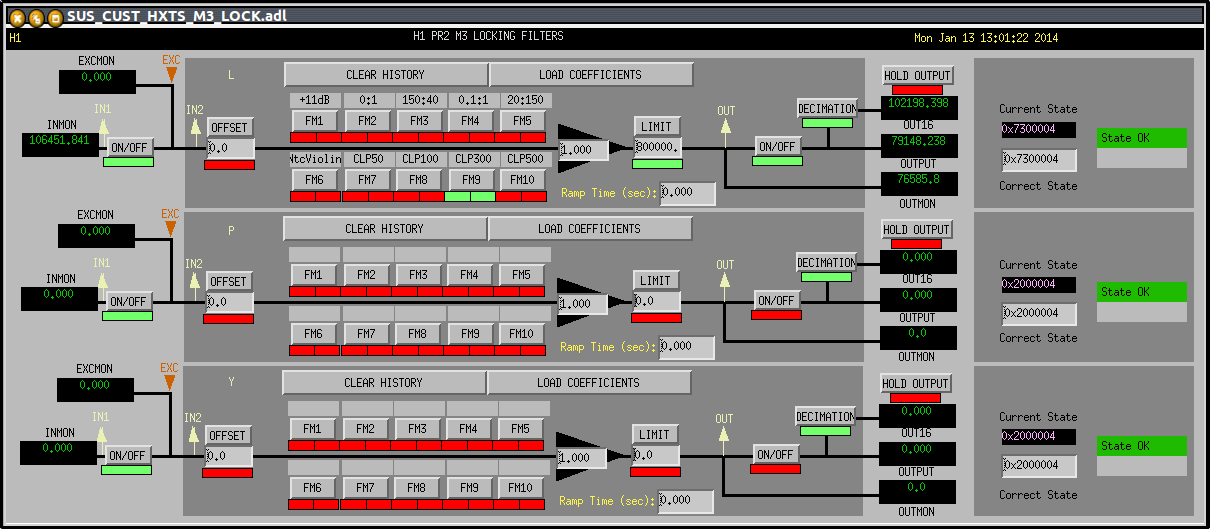
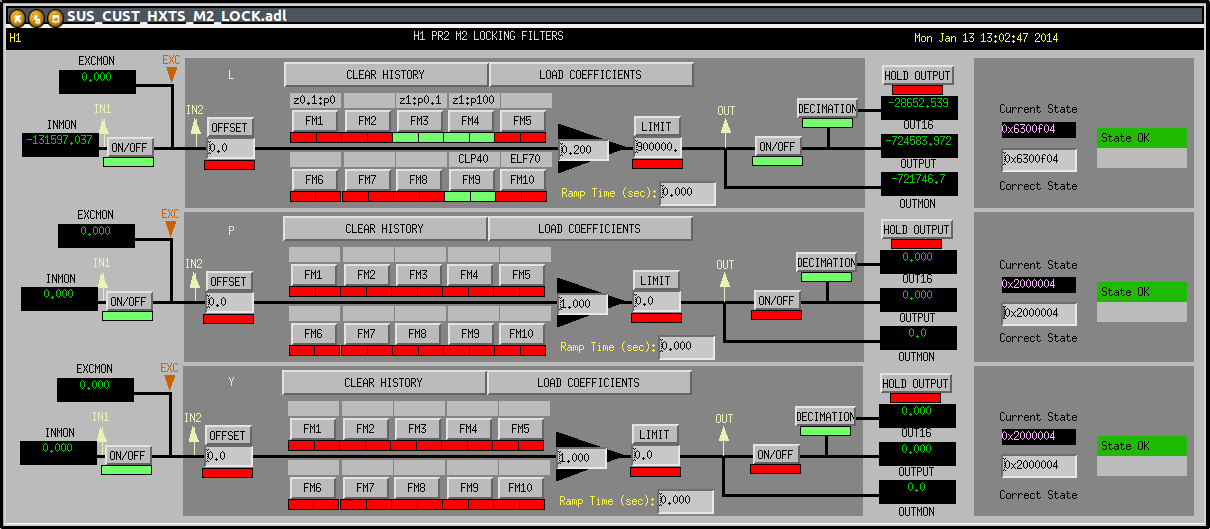
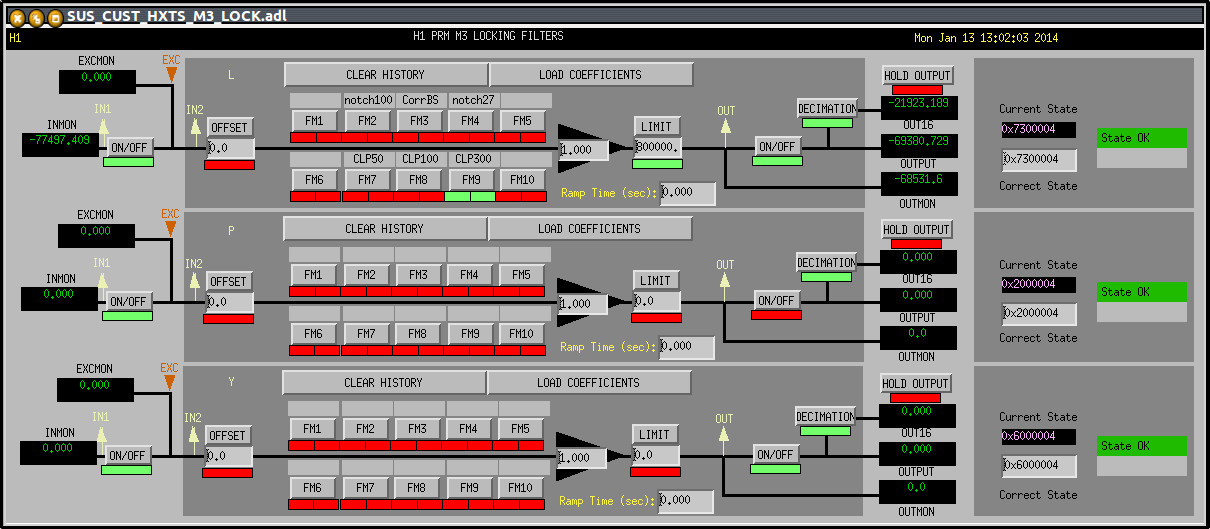
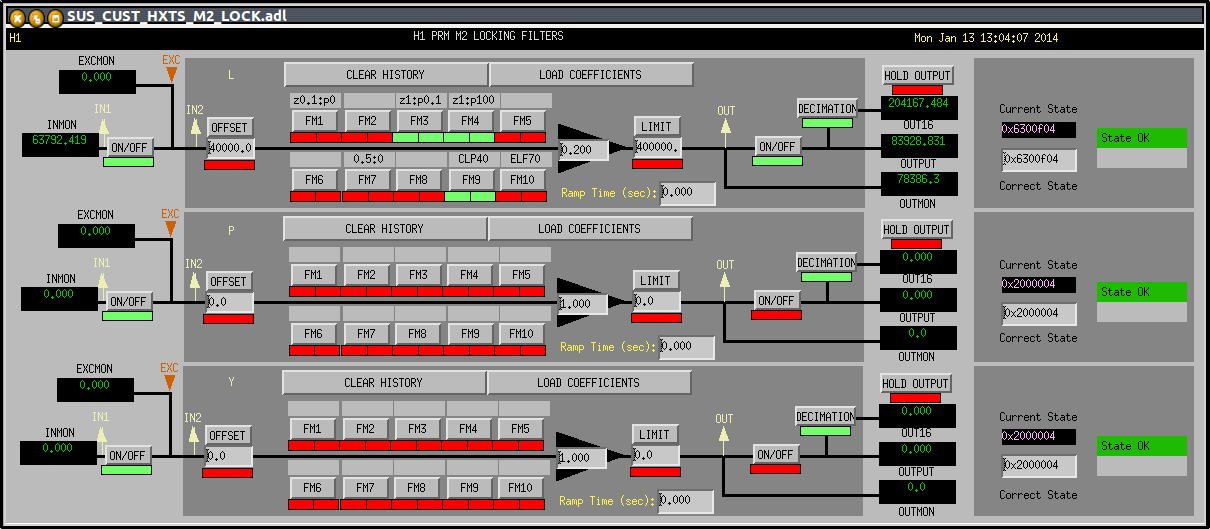
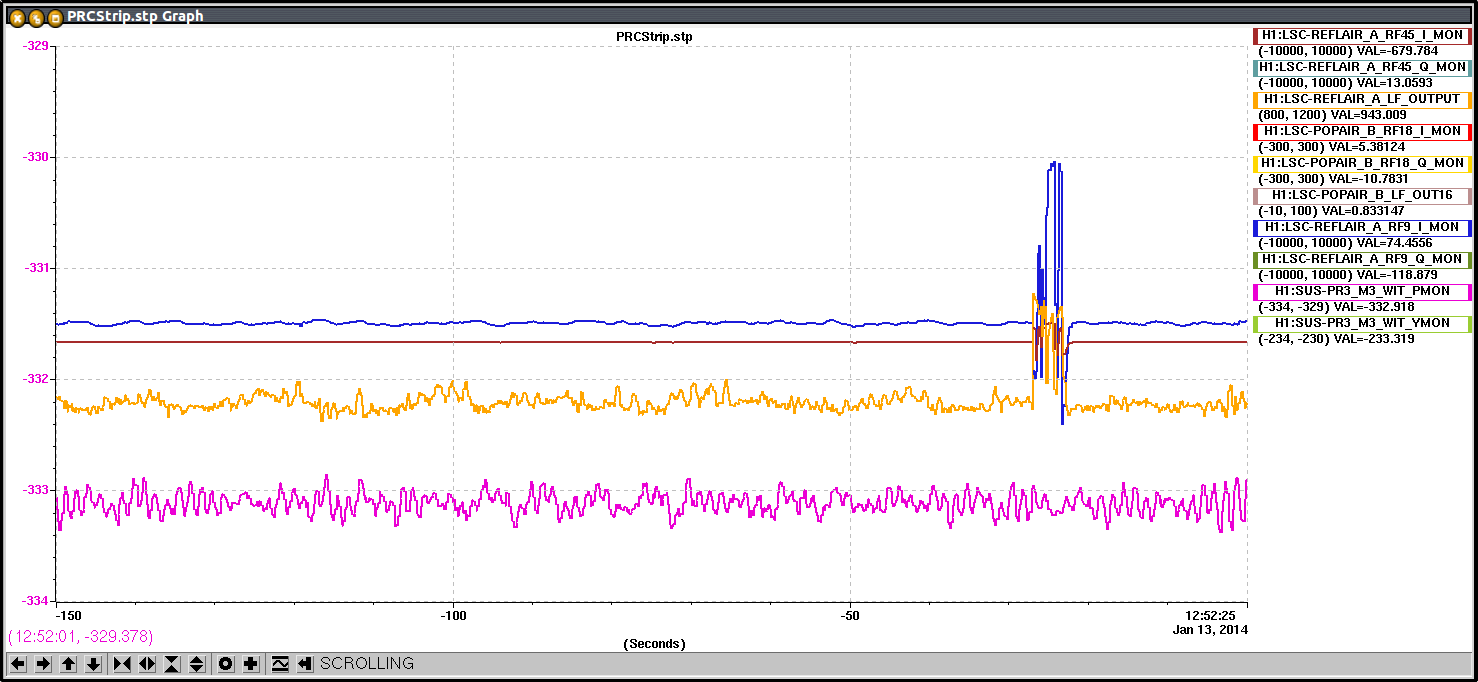
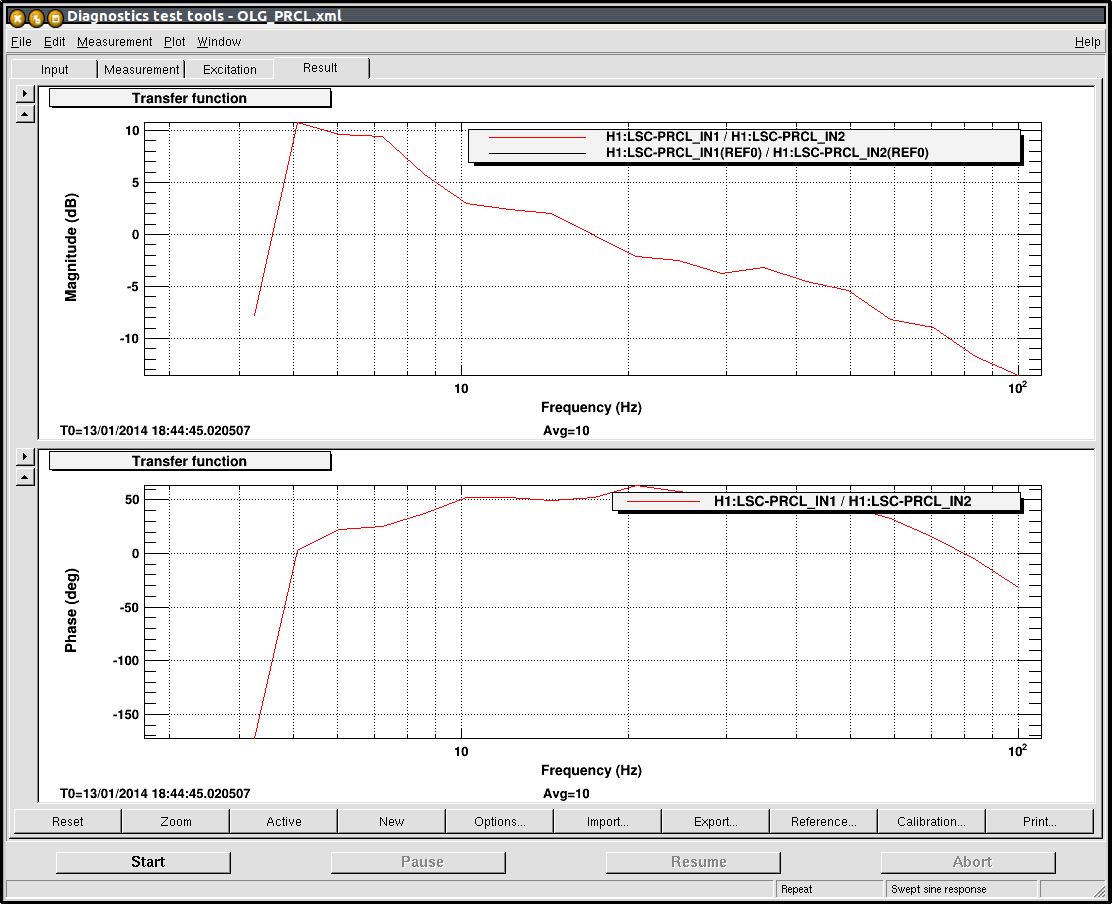
Kiwamu, Stefan We did some tweaking of the PRCL servo in order to get stable locking of the low finesse half-PRC for further actuator commissioning. - We are feeding back to PR2 and PRM. - We removed any low-pass filter from the PRCL control filter, but left a CPL300 in the M3 locking filters of PRM and PR2. Currently only M3 and M2 are feeding back - the filter modules snapshots are below. - This gives a PRCL UGF of about 18Hz (see OLG measurement, as well as the signal levels in counts below). - With that, fine-tweaking the alignment showed that PR3 was moving too much in pitch. We increased its L and P damping gain, and engaged corresponding boost filters. (snapshot below)
Images attached to this report