stefan.ballmer@LIGO.ORG - posted 02:37, Sunday 19 January 2014 (9389)
Inital Alignment (IAL) for X arm commissioned
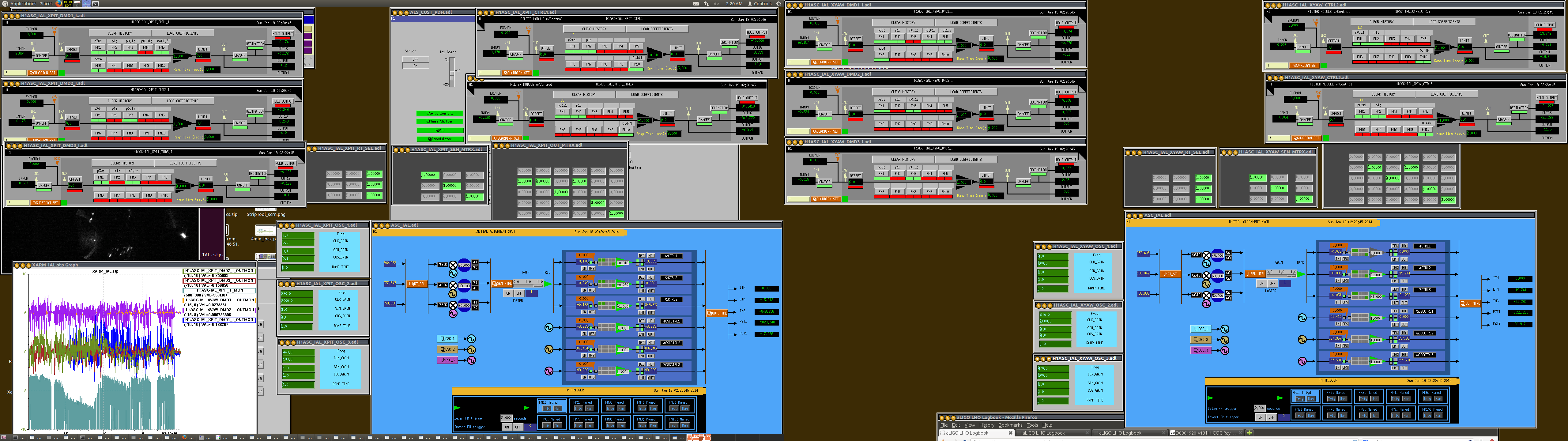
I tuned the dither alignment for the x-arm tonight. YAW: - Dithering PZT1 at 410Hz using oscillator 2. Driving ETM using control bank 2. - Dithering PZT2 at 470Hz using oscillator 3. Driving TMS using control bank 3. - Oscillator 1 and control bank 1 are currently not used. PIT: - Dithering PZT1 at 380Hz using oscillator 2. Currently not driving anything. - Dithering PZT2 at 440Hz using oscillator 3. Driving TMS using control bank 3. - Dithering ETMX at 1.7Hz using oscillator 1. Driving ETM using control bank 1. I didn't use the PZT1 pitch dither because there is a DC offset in the demodulated error signal. Note that PZT1 is input pointing position (PZT2 is angle). I was able to zero the dither offset byputting offsets into the green QPDs: H1:ALS-X_QPD_A_PIT_OFFSET = -0.464 H1:ALS-X_QPD_B_PIT_OFFSET = -0.084 Those offsets were chosen such that they only lead to a different PZT1 drive, leaving PZT2 untouched. Attached is a snapshot of all relevant screens. Still to do: - Relieve script or servo (or move integrators to the suspensions). - Automatic turn-off of the servo if the arm power drops below a threshold. - Actuation node dither for ITM centring. (I would prefer less mode-hopping for this.)
Images attached to this report