gerardo.moreno@LIGO.ORG - posted 19:37, Friday 17 August 2018 - last comment - 12:22, Thursday 23 August 2018(43502)
IP1 Chevron Baffle Assembly Update
Blades were selected for the baffle, best ones, but discovered that the hole on blades needs to be cleaned up (deburr) to be able to complete the assembly. Tools are in the oven, need them to be "class B".
Images attached to this report
Comments related to this report
The entire batch of blades produced 3 that have coating issues, one is coated about 10%, a second one about 70% and a third one has reddish hue all over it.
Images attached to this comment
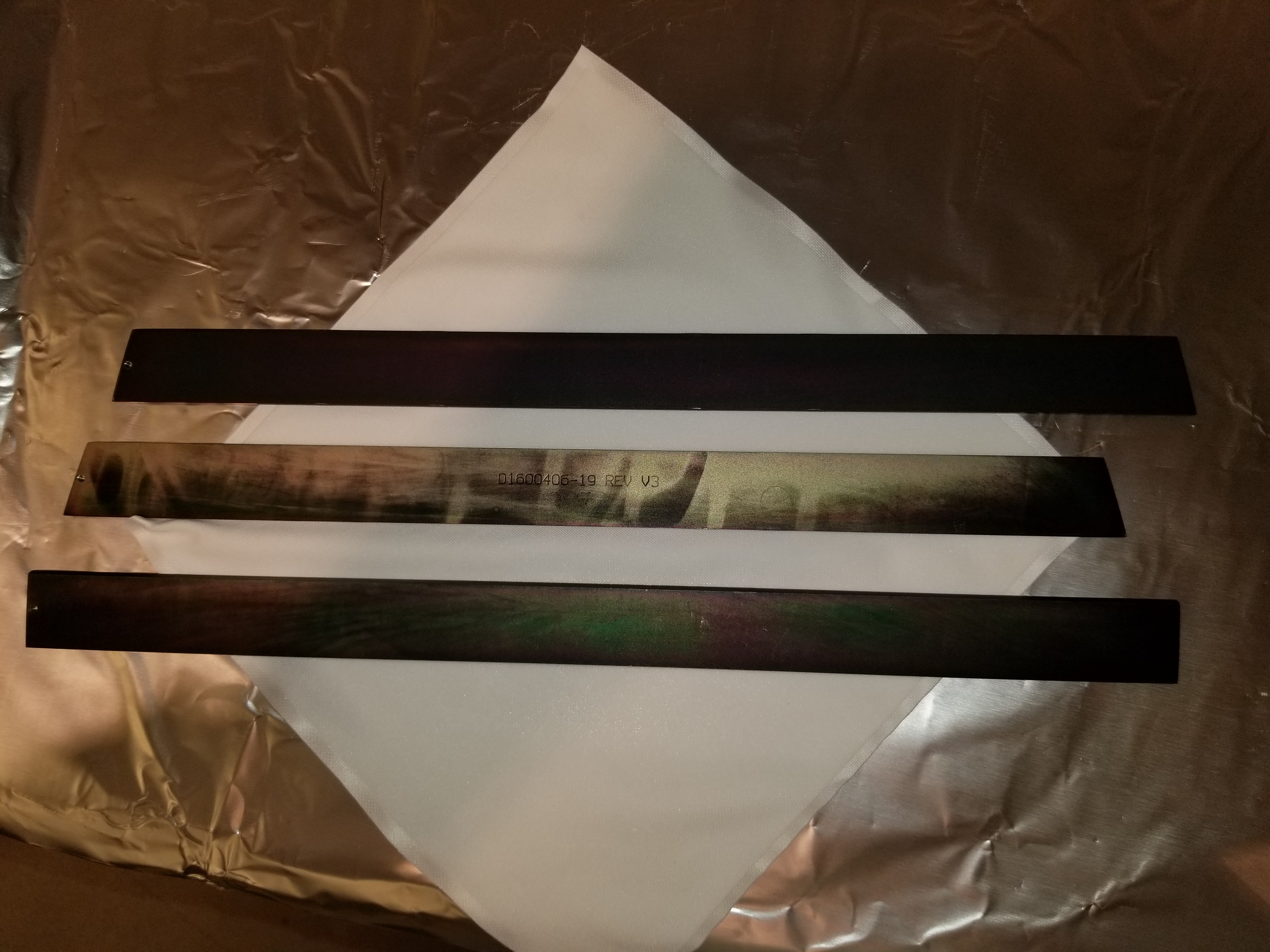


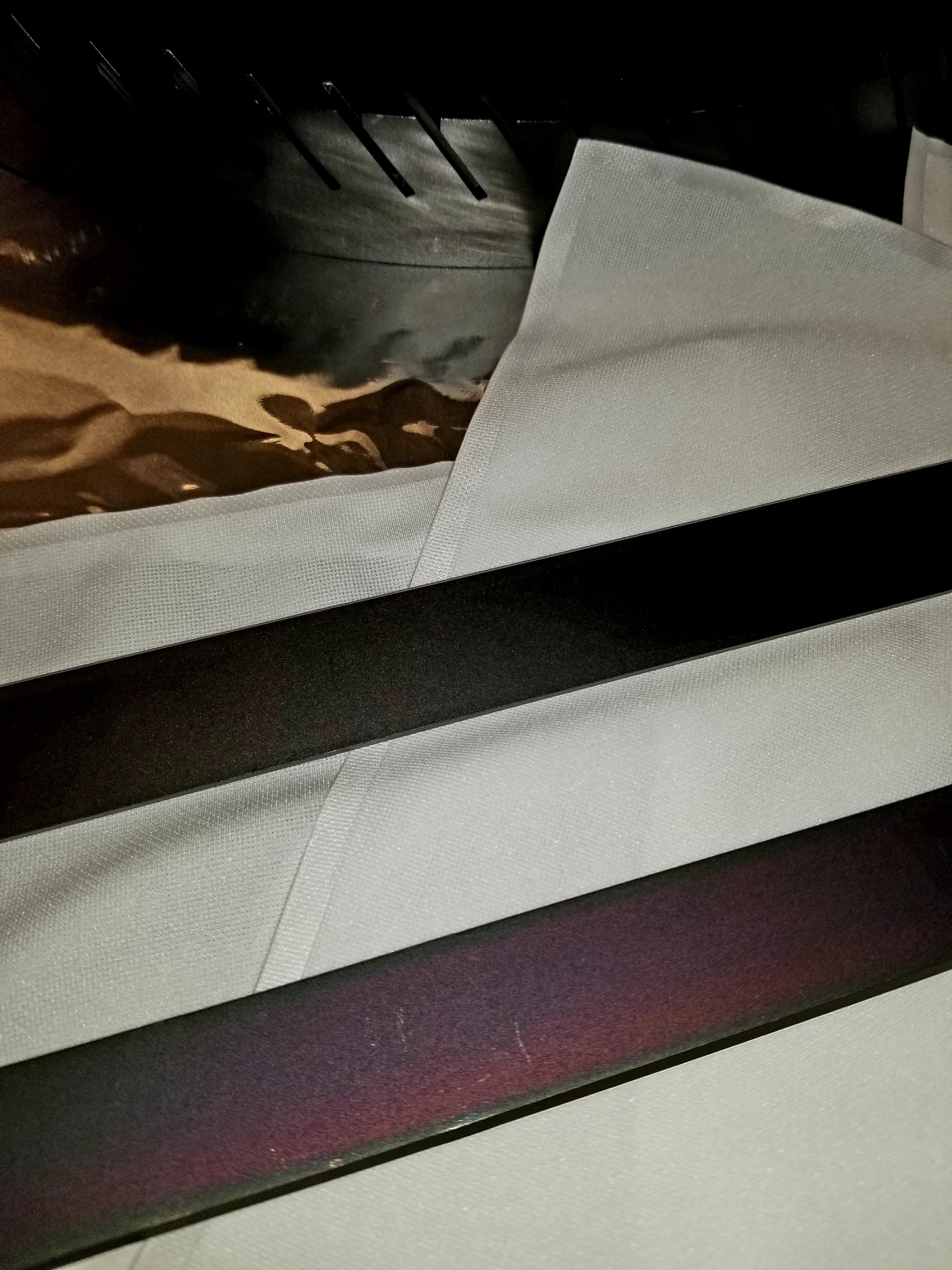
These louvers should be rejected and the disposition should be to send for rework by the vendor. Thanks for the log of these coating issues!
@Gerardo: Was the prior deburring of the fixturing hole insufficient, or did it appear that no deburring had taken place?