TITLE: 10/27 Day Shift: 15:00-23:00 UTC (08:00-16:00 PST), all times posted in UTC
STATE of H1: Commissioning
INCOMING OPERATOR: TJ
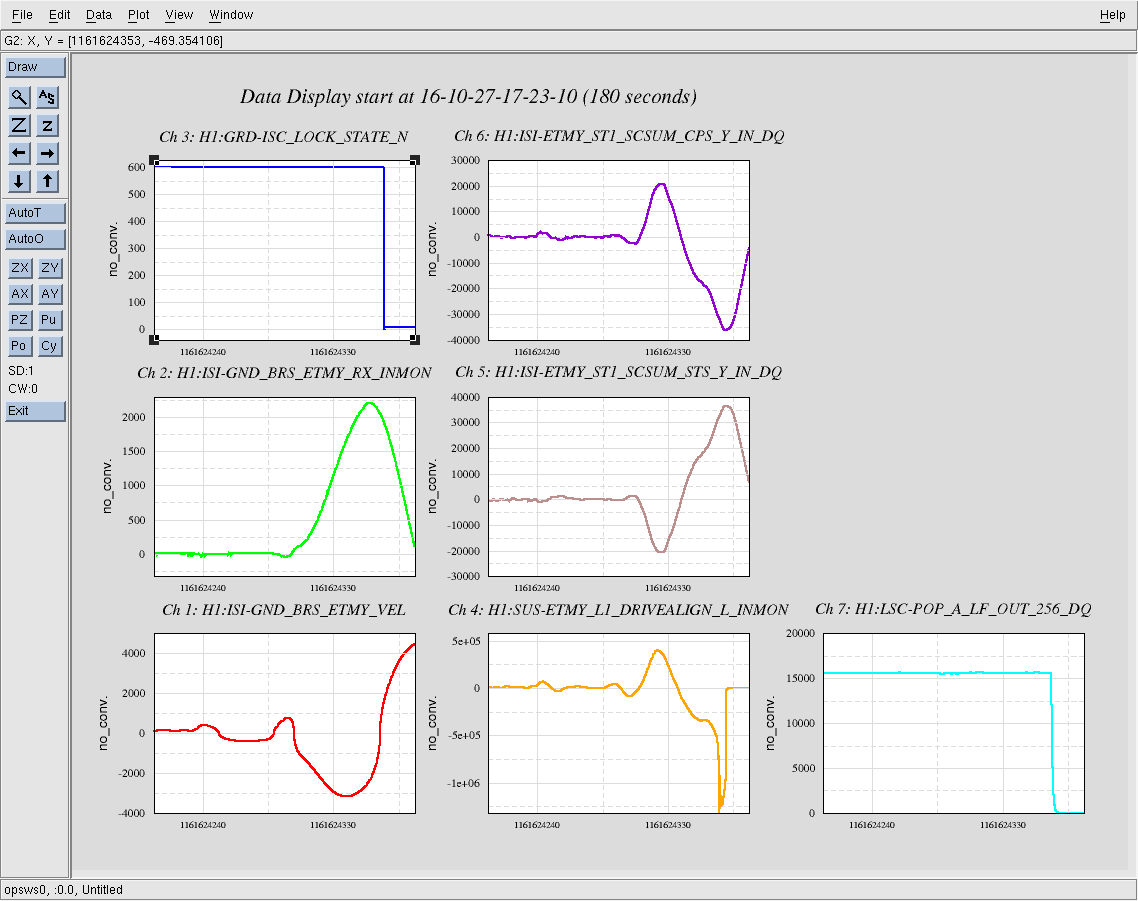
SHIFT SUMMARY: Locked at NLN for the first couple hours of my shift. Robert doing PEM injections during this period until lock was broken due to me forgetting to turn off the BRS and Robert getting too close to it. Middle part of the day was Betsy cleaning the PSL viewport. Then we immediately had another EQ when they finished. Relocking commenced in the last couple of hours of my shift.
LOG:
15:00 Robert to LVEA doing PEM injections. Took IFO out of Observing mode due to the injections.
16:40 Robert to EY for PEM inj.
17:45 Betsy, Robert, Peter, Richard to LVEA
17:50 Peter out
17:52 Chandra to MY
19:00 Fil to LVEA
19:08 Fil out
19:30 Fil to LVEA
20:02 Richard to LVEA
20:50 Betsy, Robert done
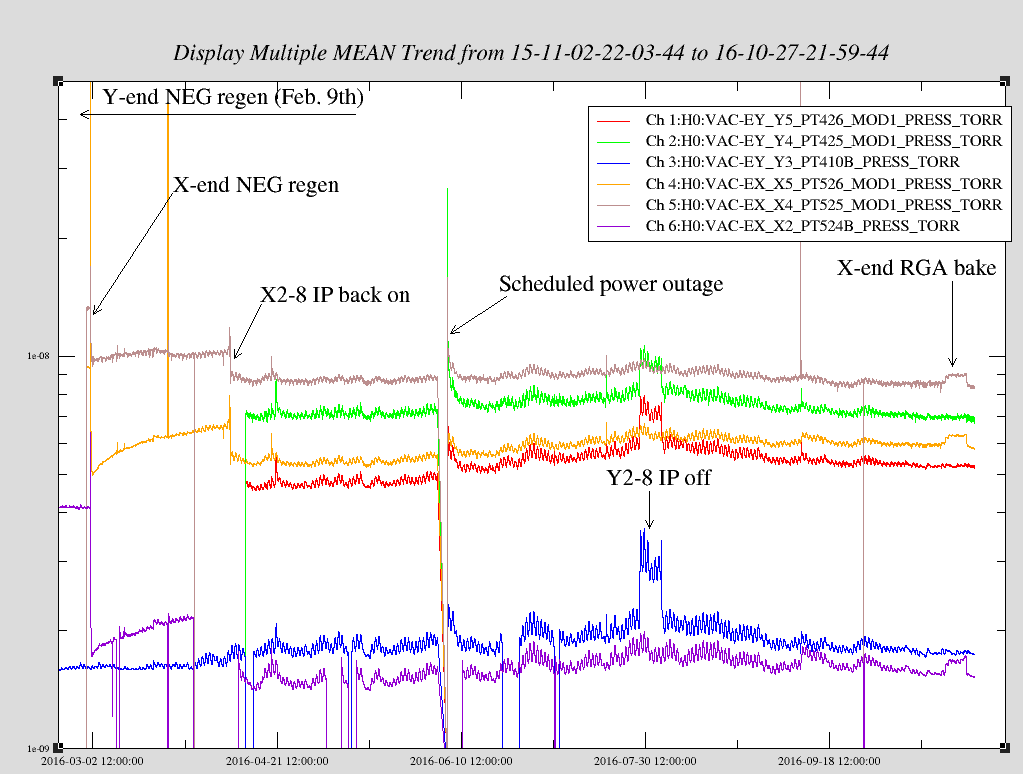
Note: The dust monitor PSL 102 has been alarming on and off all day. See attached screenshot for the trend for today. The thresholds are 70 for minor alarm and 100 for major for both particle sizes.